31 KiB
16 | Job:协程也有生命周期吗?
你好,我是朱涛。今天我们来学习Kotlin协程的Job。
Job其实就是协程的句柄。从某种程度上讲,当我们用launch和async创建一个协程以后,同时也会创建一个对应的Job对象。另外,Job也是我们理解协程生命周期、结构化并发的关键知识点。通过Job暴露的API,我们还可以让不同的协程之间互相配合,从而实现更加复杂的功能。
虽然前面已经解释过,Job就是协程的句柄,但你可能还是不清楚它到底是什么,因为句柄本身就是一个比较“虚”的概念。所以在这节课中,我们会从使用的角度入手,来看看Job到底能干什么。在充分理解了Job的用法以后,我们再来结合它的源代码进一步分析,这样对Job也会有一个更加清晰的认知。
Job生命周期
在上节课我们学习launch、async的时候,我们知道它们两个返回值类型分别是Job和Deferred。
// 代码段1
public interface Deferred<out T> : Job {
public suspend fun await(): T
}
而如果你去看Deferred的源代码,你会发现,它其实也是继承自Job的。对应的,它只是多了一个泛型参数T,还多了一个返回类型为T的await()方法。所以,不管是launch还是async,它们本质上都会返回一个Job对象。
通过Job对象,我们主要可以做两件事情:
- 使用Job 监测协程的生命周期状态;
- 使用Job 操控协程。
让我们来看一个具体的例子:
// 代码段2
fun main() = runBlocking {
val job = launch {
delay(1000L)
}
job.log() // ①
job.cancel() // ②
job.log() // ③
delay(1500L)
}
/**
* 打印Job的状态信息
*/
fun Job.log() {
logX("""
isActive = $isActive
isCancelled = $isCancelled
isCompleted = $isCompleted
""".trimIndent())
}
/**
* 控制台输出带协程信息的log
*/
fun logX(any: Any?) {
println("""
================================
$any
Thread:${Thread.currentThread().name}
================================""".trimIndent())
}
/*
输出结果:
================================
isActive = true
isCancelled = false
isCompleted = false
Thread:main @coroutine#1
================================
================================
isActive = false
isCancelled = true
isCompleted = false
Thread:main @coroutine#1
================================
*/
在这段代码当中,我们定义了一个Job.log()扩展函数,它的作用就是打印Job的生命周期状态。通过调用这个函数,我们就可以知道对应的协程处于什么状态。
注释①处的调用结果,“isActive = true”,这代表了当前的协程处于活跃状态。注释②,我们调用了job.cancel()以后,协程任务就会被取消。因此,注释③处的调用结果就会变成“isCancelled = true”,这代表了协程任务处于取消状态。
所以从上面的代码中,我们可以看到:job.log(),其实就是在监测协程;job.cancel(),其实就是在操控协程。
而除了job.cancel()可以操控协程以外,我们还经常使用job.start()来启动协程任务,一般来说,它都是搭配“CoroutineStart.LAZY”来使用的。
// 代码段3
fun main() = runBlocking {
// 变化在这里
// ↓
val job = launch(start = CoroutineStart.LAZY) {
logX("Coroutine start!")
delay(1000L)
}
delay(500L)
job.log()
job.start() // 变化在这里
job.log()
delay(500L)
job.cancel()
delay(500L)
job.log()
delay(2000L)
logX("Process end!")
}
/*
输出结果:
================================
isActive = false
isCancelled = false
isCompleted = false
Thread:main @coroutine#1
================================
================================
isActive = true
isCancelled = false
isCompleted = false
Thread:main @coroutine#1
================================
================================
Coroutine start!
Thread:main @coroutine#2
================================
================================
isActive = false
isCancelled = true
isCompleted = true
Thread:main @coroutine#1
================================
================================
Process end!
Thread:main @coroutine#1
================================
*/
根据以上代码的运行结果,可以发现,当我们使用CoroutineStart.LAZY作为启动模式的时候,协程任务被launch以后,并不会立即执行,即使我们在代码中delay了500毫秒,launch内部的"Coroutine start!"也仍然没有输出。这是典型的懒加载行为模式。
当我们在外部调用了job.start()以后,job的状态才变成了Active活跃。而当调用了cancel以后,job的状态才变成isCancelled、isCompleted。
到这里,我们基本上就可以想象出Job整个的生命周期了。请参考下面这张图:

从图中,我们可以看到,对于协程的Job来说,它有两种初始状态,如果Job是以懒加载的方式创建的,那么它的初始状态将会是New;而如果一个协程是以非懒加载的方式创建的,那么它的初始状态就会是Active。
另外如果你仔细分析了上面代码的输出结果,你会发现,当调用cancel以后,会出现一个奇怪的现象:isCancelled = true、isCompleted = true。也就是说,当协程任务被取消以后,isCancelled和isCompleted同时都是true。但这跟上面的流程图并不一致啊!这是为什么呢?
这是因为,协程认为由于某种原因取消的协程,也仍然是一种“结束状态”,这其实也就对应了流程图中的“最终状态”。
换句话说,流程图当中的New、Active、Completing、Cancelling、Completed、Cancelled这些状态,都是Job内部私有的状态。而Job对外暴露出的isCompleted并不是与其一一对应的。Job内部私有的Completed、Cancelled状态,都会认为是外部的isCompleted状态。
测试了协程cancel()方法以后,我们再来看看协程正常执行完毕的情况:
// 代码段4
fun main() = runBlocking {
val job = launch(start = CoroutineStart.LAZY) {
logX("Coroutine start!")
delay(1000L)
}
delay(500L)
job.log()
job.start()
job.log()
delay(1100L) // ①
job.log()
delay(2000L) // ②
logX("Process end!")
}
================================
isActive = false
isCancelled = false
isCompleted = false
Thread:main @coroutine#1
================================
================================
isActive = true
isCancelled = false
isCompleted = false
Thread:main @coroutine#1
================================
================================
Coroutine start!
Thread:main @coroutine#2
================================
================================
isActive = false
isCancelled = false
isCompleted = true
Thread:main @coroutine#1
================================
================================
Process end!
Thread:main @coroutine#1
================================
在这段代码中,我们可以清晰地看到,协程的状态从Start到Active,最后到Completed,这很好理解。
不过,需要注意的是注释①处,为了等待job任务执行完毕,我们在外面等待了1100毫秒,这种方式其实并不好,因为大部分情况下,我们很难从外部判断协程需要多长的时间才能结束(比如网络请求任务、下载任务)。
另外,请留意上面的注释②处,我们使用delay(2000L)的方式,希望在job执行完毕以后输出“Process end!”,这样的代码,也是建立在“我们知道Job只需要1000毫秒就能执行完毕”的前提。如果协程内部的delay远大于外部的delay,以上的运行结果就会完全不一样:
// 代码段5
fun main() = runBlocking {
val job = launch(start = CoroutineStart.LAZY) {
logX("Coroutine start!")
delay(4000L) // 变化在这里
}
delay(500L)
job.log()
job.start()
job.log()
delay(1100L)
job.log()
delay(2000L)
logX("Process end!")
}
/*
输出结果:
================================
isActive = false
isCancelled = false
isCompleted = false
Thread:main @coroutine#1
================================
================================
isActive = true
isCancelled = false
isCompleted = false
Thread:main @coroutine#1
================================
================================
Coroutine start!
Thread:main @coroutine#2
================================
================================
isActive = true
isCancelled = false
isCompleted = false
Thread:main @coroutine#1
================================
================================
Process end!
Thread:main @coroutine#1
================================
到这里,job仍然还在delay,整个程序并没有完全退出。
*/
可以看到,当我们将job内部的delay改为4000毫秒以后,执行结果就完全不一样了,我们无法监测到isCompleted状态。
另外,如果你实际运行了上面的代码,你会发现“Process end!”输出以后,程序并没有立即结束,而是等待了大约900毫秒才结束,这是因为runBlocking会一直阻塞,等到job任务执行完毕以后才真正退出。
所以,为了更加灵活地等待和监听协程的结束事件,我们可以用job.join()以及 invokeOnCompletion {} 来优化上面的代码。
// 代码段6
fun main() = runBlocking {
suspend fun download() {
// 模拟下载任务
val time = (Random.nextDouble() * 1000).toLong()
logX("Delay time: = $time")
delay(time)
}
val job = launch(start = CoroutineStart.LAZY) {
logX("Coroutine start!")
download()
logX("Coroutine end!")
}
delay(500L)
job.log()
job.start()
job.log()
job.invokeOnCompletion {
job.log() // 协程结束以后就会调用这里的代码
}
job.join() // 等待协程执行完毕
logX("Process end!")
}
/*
运行结果:
================================
isActive = false
isCancelled = false
isCompleted = false
Thread:main @coroutine#1
================================
================================
isActive = true
isCancelled = false
isCompleted = false
Thread:main @coroutine#1
================================
================================
Coroutine start!
Thread:main @coroutine#2
================================
================================
Delay time: = 252
Thread:main @coroutine#2
================================
================================
Coroutine end!
Thread:main @coroutine#2
================================
================================
isActive = false
isCancelled = false
isCompleted = true
Thread:main @coroutine#2
================================
================================
Process end!
Thread:main @coroutine#1
================================
*/
这里我们可以看到,invokeOnCompletion {} 的作用,其实就是监听协程结束的事件。需要注意的是,它和前面的isCompleted类似,如果job被取消了,invokeOnCompletion {} 这个回调仍然会被调用。
而job.join()其实是一个“挂起函数”,它的作用就是:挂起当前的程序执行流程,等待job当中的协程任务执行完毕,然后再恢复当前的程序执行流程。可以看到,上节课学的“挂起函数”的概念再一次出现了,它对我们后续理解协程的API非常重要,如果你无法理解上面那句话的意思,一定要去重新回顾上节课的内容。
至此,我们就对Job的两种使用场景都已经有了充分认识了。我们来大概看看Job的源代码:
// 代码段7
public interface Job : CoroutineContext.Element {
// 省略部分代码
// ------------ 状态查询API ------------
public val isActive: Boolean
public val isCompleted: Boolean
public val isCancelled: Boolean
public fun getCancellationException(): CancellationException
// ------------ 操控状态API ------------
public fun start(): Boolean
public fun cancel(cause: CancellationException? = null)
public fun cancel(): Unit = cancel(null)
public fun cancel(cause: Throwable? = null): Boolean
// ------------ 等待状态API ------------
public suspend fun join()
public val onJoin: SelectClause0
// ------------ 完成状态回调API ------------
public fun invokeOnCompletion(handler: CompletionHandler): DisposableHandle
public fun invokeOnCompletion(
onCancelling: Boolean = false,
invokeImmediately: Boolean = true,
handler: CompletionHandler): DisposableHandle
}
可见,Kotlin官方对Job的API做了更加详细的划分,但实际上来说都属于“监测状态”“操控状态”这两个大的范畴。
现在我们对Job也有了更加深入的认识了,不过到底该如何理解“Job是协程的句柄”这句话呢?
这里,我们还是可以从现实生活中找例子,来建立大致的思维模型。Job和协程的关系,就有点像“遥控器和空调的关系”。
- 空调遥控器可以监测空调的运行状态;Job也可以监测协程的运行状态;
- 空调遥控器可以操控空调的运行状态,Job也可以简单操控协程的运行状态。
所以,从某种程度来讲,遥控器也是空调对外暴露的一个“句柄”。
好,充分理解了Job以后,我们来看看Deferred。
Deferred
前面我们介绍过Deferred其实就是继承自Job的一个接口,它并没有在Job的基础上扩展出很多其他功能,最重要的就是await()这个方法。让我们来看一个简单的例子:
// 代码段8
fun main() = runBlocking {
val deferred = async {
logX("Coroutine start!")
delay(1000L)
logX("Coroutine end!")
"Coroutine result!"
}
val result = deferred.await()
println("Result = $result")
logX("Process end!")
}
/*
输出结果:
================================
Coroutine start!
Thread:main @coroutine#2
================================
================================
Coroutine end!
Thread:main @coroutine#2
================================
Result = Coroutine result!
================================
Process end!
Thread:main @coroutine#1
================================
*/
从代码的执行结果中,我们可以发现,deferred.await()这个方法,不仅可以帮助我们获取协程的执行结果,它还会阻塞当前协程的执行流程,直到协程任务执行完毕。在这一点的行为上,await()和join()是类似的。
我们也来看看await()的函数签名:
// 代码段9
public interface Deferred<out T> : Job {
// 注意这里
// ↓
public suspend fun await(): T
}
可以看到,await()这个方法其实是一个挂起函数,这也就意味着,这个方法拥有挂起和恢复的能力。如果当前的Deferred任务还没执行完毕,那么,await()就会挂起当前的协程执行流程,等待Deferred任务执行完毕,再恢复执行后面剩下的代码。
看到这里,也许你会觉得奇怪,**挂起函数不是非阻塞的吗?怎么这里又出现了阻塞?**注意,这里其实只是看起来像是阻塞了,但它实际上是将剩下的代码存了起来,留在后面才执行了。
为了让你更加透彻地理解await()挂起函数背后的细节,我进一步完善了之前协程思维模型的动图。
所以,这里await()后面的代码,虽然看起来是阻塞了,但它只是执行流程被挂起和恢复的一种表现。而且如果你仔细思考的话,你会发现上面这个动图,同样也描述了之前job.join()的行为模式,在协程执行完毕之前,后面的协程代码都被暂时挂起了,等到协程执行完毕,才有机会继续执行。
所以,总的来说,Deferred只是比Job多了一个await()挂起函数而已,通过这个挂起函数,我们可以等待协程执行完毕的同时,还可以直接拿到协程的执行结果。
至此,我们就已经把Job和Deferred的生命周期讲清楚了。对于Job,我们了解了监测生命周期状态、操控生命周期状态;对于Deferred,我们也明白了如何拿到它的执行结果。
那么接下来,就只剩下一个话题了:结构化并发。
Job与结构化并发
也许你会经常看到类似这样的话:协程的优势在于结构化并发。在我看来,Kotlin协程的结构化并发,它的重要性,是仅次于“挂起函数”的。
也就是说,“结构化并发”是Kotlin协程的第二大优势。那么,到底什么是结构化并发呢?其实,这是一个非常大的话题,三言两语真的很难讲清楚。“结构化并发”会贯穿我们整个课程,随着课程的进展,你会发现,它跟很多其他协程概念都会发生牵连。
简单来说,“结构化并发”就是:带有结构和层级的并发。
说实话,在抽象的概念面前,语言和文字总会显得苍白无力。所以,我们还是来看一个具体的例子吧。
// 代码段10
fun main() = runBlocking {
val parentJob: Job
var job1: Job? = null
var job2: Job? = null
var job3: Job? = null
parentJob = launch {
job1 = launch {
delay(1000L)
}
job2 = launch {
delay(3000L)
}
job3 = launch {
delay(5000L)
}
}
delay(500L)
parentJob.children.forEachIndexed { index, job ->
when (index) {
0 -> println("job1 === job is ${job1 === job}")
1 -> println("job2 === job is ${job2 === job}")
2 -> println("job3 === job is ${job3 === job}")
}
}
parentJob.join() // 这里会挂起大约5秒钟
logX("Process end!")
}
/*
输出结果:
job1 === job is true
job2 === job is true
job3 === job is true
// 等待大约5秒钟
================================
Process end!
Thread:main @coroutine#1
================================
*/
在上面的代码中,我们一共定义了4个Job,parentJob是最外层的launch返回的对象,而在这个launch的内部,还额外嵌套了三个launch,它们的Job对象分别赋值给了job1、job2、job3。
接着,我们对“parentJob.children”进行了遍历,然后逐一对比了它们与job1、job2、job3的引用是否相等(“===”代表了引用相等,即是否是同一个对象)。
通过这样的方式,我们可以确定,job1、job2、job3其实就是parentJob的children。也就是说,我们使用launch创建出来的协程,是存在父子关系的。
如果你去看Job的源代码,你会发现它还有两个API是用来描述父子关系的。
// 代码段11
public interface Job : CoroutineContext.Element {
// 省略部分代码
// ------------ parent-child ------------
public val children: Sequence<Job>
@InternalCoroutinesApi
public fun attachChild(child: ChildJob): ChildHandle
}
可以看到,每个Job对象,都会有一个children属性,它的类型是Sequence,它是一个惰性的集合,我们可以对它进行遍历。而attachChild()则是一个协程内部的API,用于绑定ChildJob的,这个我们到源码篇的时候再深入了解。
所以,我们其实可以用一个简单的结构图来描述上面4个Job之间的关系:
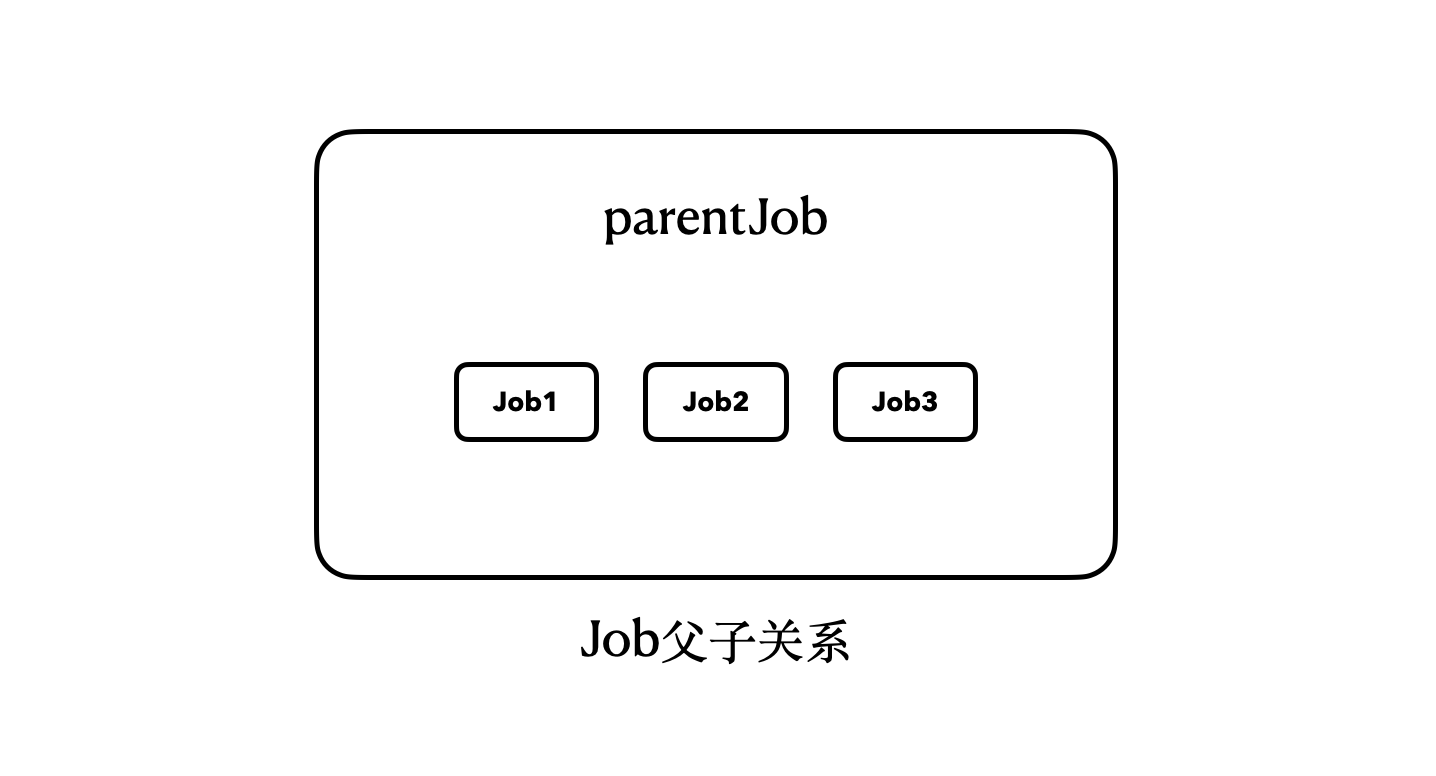
那么,这样的父子关系到底意味着什么呢?如果你实际运行这里的代码,你就会注意到:“parentJob.join()”这行代码会被挂起大约5秒钟。
注意了,我们调用的是parentJob的join()方法,但是,它会等待其内部的job1、job2、job3全部执行完毕,才会恢复执行。换句话说,只有当job1、job2、job3全部执行完毕,parentJob才算是执行完毕了。
所以到这里,也许你就已经可以理解前面的那句话了:结构化并发就是带有结构和层级的并发。
实际上,协程不像我们之前学过的线程,线程之间是不存在父子关系的,但协程之间是会存在父子关系的。不过要命的是,协程的这种父子关系并不明显,如果我们不深入Job的源码,就无法意识到这一点。这也是很多人无法理解协程运行模式的原因所在。
毕竟,如果你将上面的4个launch都割裂来看,那么无论如何,你都无法理解上面代码的运行顺序,可是一旦你建立了协程Job父子关系的思维模型,你就可以轻而易举地理解以上的代码。
现在,我们将上面的代码做一些修改,我相信你也可以马上弄明白它的运行模式!
// 代码段12
fun main() = runBlocking {
val parentJob: Job
var job1: Job? = null
var job2: Job? = null
var job3: Job? = null
parentJob = launch {
job1 = launch {
logX("Job1 start!")
delay(1000L)
logX("Job1 done!") // ①,不会执行
}
job2 = launch {
logX("Job2 start!")
delay(3000L)
logX("Job2 done!") // ②,不会执行
}
job3 = launch {
logX("Job3 start!")
delay(5000L)
logX("Job3 done!")// ③,不会执行
}
}
delay(500L)
parentJob.children.forEachIndexed { index, job ->
when (index) {
0 -> println("job1 === job is ${job1 === job}")
1 -> println("job2 === job is ${job2 === job}")
2 -> println("job3 === job is ${job3 === job}")
}
}
parentJob.cancel() // 变化在这里
logX("Process end!")
}
/*
输出结果:
================================
Job1 start!
Thread:main @coroutine#3
================================
================================
Job2 start!
Thread:main @coroutine#4
================================
================================
Job3 start!
Thread:main @coroutine#5
================================
job1 === job is true
job2 === job is true
job3 === job is true
================================
// 这里不会等待5秒钟
Process end!
Thread:main @coroutine#1
================================
*/
这段代码,最大的改变就在于我们将“parentJob.join”改为了“parentJob.cancel()”。从运行结果中我们可以看到,即使我们调用的只是parentJob的cancel()方法,并没有碰过job1、job2、job3,但是它们内部的协程任务也全都被取消了。
这里,我们也可以用一个简单的动图来描述它们之间的关系:
所以,当我们以结构化的方式构建协程以后,我们的join()、cancel()等操作,也会以结构化的模式来执行。
思考与实战
在学完Job和Deferred以后,也许你已经可以非常明确地判断出什么场景该用launch,什么场景该用async了。那么,这是不是就意味着你已经完成了学习的目标呢?
当然不是!理论学得再多,如果不能结合实际落地场景来分析,那终究都是一场空。接下来,我们来看一个常见的代码模式:
// 代码段13
fun main() = runBlocking {
suspend fun getResult1(): String {
delay(1000L) // 模拟耗时操作
return "Result1"
}
suspend fun getResult2(): String {
delay(1000L) // 模拟耗时操作
return "Result2"
}
suspend fun getResult3(): String {
delay(1000L) // 模拟耗时操作
return "Result3"
}
val results = mutableListOf<String>()
val time = measureTimeMillis {
results.add(getResult1())
results.add(getResult2())
results.add(getResult3())
}
println("Time: $time")
println(results)
}
/*
输出结果:
Time: 3018
[Result1, Result2, Result3]
*/
这段代码里,我们在内部定义了三个挂起函数getResult1()、getResult2()、getResult3(),它们各自都会耗时1000毫秒,而且它们之间的运行结果也互不相干。代码逻辑也很简单,也是我们平时在工作中会经常遇到的业务场景。
不过请问,你知道该如何优化上面的代码吗?
我们进一步来分析一下。当我们直接调用这三个挂起函数,并且拿到结果以后,整个过程大约需要消耗3000毫秒,也就是这几个函数耗时的总和。对于这样的情况,我们其实完全可以使用async来优化:
// 代码段14
fun main() = runBlocking {
suspend fun getResult1(): String {
delay(1000L) // 模拟耗时操作
return "Result1"
}
suspend fun getResult2(): String {
delay(1000L) // 模拟耗时操作
return "Result2"
}
suspend fun getResult3(): String {
delay(1000L) // 模拟耗时操作
return "Result3"
}
val results: List<String>
val time = measureTimeMillis {
val result1 = async { getResult1() }
val result2 = async { getResult2() }
val result3 = async { getResult3() }
results = listOf(result1.await(), result2.await(), result3.await())
}
println("Time: $time")
println(results)
}
/*
输出结果:
Time: 1032
[Result1, Result2, Result3]
*/
所以,当我们总是拿launch和async来做对比的时候,就会不自觉地认为async是用来替代launch的。但实际上,async最常见的使用场景是:与挂起函数结合,优化并发。
请不要小看这个场景,在实际工作中,如果你仔细去分析嵌套的异步代码,你会发现,很多异步任务之间都是没有互相依赖的,这样的代码结合挂起函数后,再通过async并发来执行,是可以大大提升代码运行效率的。
换句话说,如果我们的任务是IO密集型的,代码运行效率是可以实现成倍提升的。一个简单的改造,能极大地提升运行效率,何乐而不为呢?
那么,万一我们的任务在某些场景下,并发反而会降低效率呢?这也很简单,我们也完全可以使用CoroutineStart来控制它的启动模式。所以,这种方式的扩展性和灵活性都很好。
小结
这节课,我们主要学习了Job、Deferred,通过对它们两者的学习,我们知道了,协程是有生命周期的,同时也发现,协程其实是结构化的。
具体来说,有以下几个要点我们需要好好掌握:
- Job,相当于协程的句柄,Job与协程的关系,有点像“遥控器与空调的关系”。
- Job,在它的内部,维护了一系列的生命周期状态,它也对应着协程的生命周期状态。
- 通过Job,我们可以监测协程的状态,比如isActive、isCancelled、isCompleted;另外,我们也可以一定程度地操控协程的状态,比如start()、cancel()。
- 除此之外,我们还可以通过
Job.invokeOnCompletion {}来监听协程执行完毕的事件;通过Job.join()这个挂起函数,我们可以挂起当前协程的执行流程,等到协程执行完毕以后,再恢复执行后面的代码。 - 而对于Deferred.await(),它的行为模式和Job.join()类似,只是它还会返回协程的执行结果。
- 另外,协程是结构化的并发,这是它的第二大优势。通过分析Job的源码,我们发现,一个Job可以拥有多个ChildJob;对应的,协程也可拥有多个“子协程”。
- 那么结构化并发带来的最大优势就在于,我们可以实现只控制“父协程”,从而达到控制一堆子协程的目的。在前面的例子中,parentJob.join()不仅仅只会等待它自身执行完毕,还会等待它内部的job1、job2、job3执行完毕。parentJob.cancel()同理。
最后呢,我也想跟你分享一下我学习协程的一些方法论。
其实,人学习新知识最快的方式,就是与旧的知识建立关联。举个例子,第一门计算机语言往往是最难学的,因为这是一个无中生有的过程;但当你掌握C、C++以后,再去学习Java、Python就会简单很多,因为你可以用脑子里的旧知识与其建立关联。
所以,虽然我在学习协程的时候也走了很多弯路,但总的来说,我做对了以下几件事,这里我也把经验分享给你。
第一,横向对比。在初次学习Kotlin协程失败以后,我去粗略学习了其他语言的协程,在那个时候,C#之类的协程学习资源更加丰富。通过对比C#、Go等语言的协程后,我理解了“广义协程”的概念,并且也知道yield、async、await只是一种广泛存在的协程模式。而当我理解了广义协程这个旧的知识之后,我突然发现Kotlin的协程就不难理解了。
第二,建立思维模型。这是我的一个“习惯”,不管是计算机网络、操作系统、数据结构、设计模式,还是其他领域,比如说高中的电磁学、大学的线性代数,在学习抽象知识的时候,我都喜欢虚构一些思维模型,来模拟它们内部的运行机制。
协程,就是一门非常抽象的技术,我喜欢用协程API编写一些简单的Demo来分析它们的行为模式,同时为其建立思维模型。这样一来,我脑海里的知识既不容易遗忘,也更成体系。比如,launch就像射箭;async就像钓鱼,这既是思维模型,同时也是在用旧知识学新知识。
第三,纵向深入。当我通过建立思维模型,对协程有了全面认识之后,我开始深入研究协程的源码。这时候,我从源码当中找到了更多的细节,来完善、支撑我脑子里的思维模型,从此,它们就不再是我凭空编造出来的东西了,因为证据都在源码里。这是一个自顶向下、逐渐深入的过程,反之则行不通。
所以,现在回过头来看,其实最重要的,还是用旧知识学新知识**。**希望我的方法能对你有所启发。
思考题
请问下面这段代码的执行结果是什么?你能分析出原因吗?
// 代码段15
fun main() = runBlocking {
val job = launch {
logX("First coroutine start!")
delay(1000L)
logX("First coroutine end!")
}
job.join()
val job2 = launch(job) {
logX("Second coroutine start!")
delay(1000L)
logX("Second coroutine end!")
}
job2.join()
logX("Process end!")
}
欢迎在留言区分享你的答案,也欢迎你把今天的内容分享给更多的朋友。