30 KiB
38|异步处理:Future是什么?它和async/await是什么关系?
你好,我是陈天。
通过前几讲的学习,我们对并发处理,尤其是常用的并发原语,有了一个比较清晰的认识。并发原语是并发任务之间同步的手段,今天我们要学习的 Future 以及在更高层次上处理 Future 的 async/await,是产生和运行并发任务的手段。
不过产生和运行并发任务的手段有很多,async/await 只是其中之一。在一个分布式系统中,并发任务可以运行在系统的某个节点上;在某个节点上,并发任务又可以运行在多个进程中;而在某个进程中,并发任务可以运行在多个线程中;在某个(些)线程上,并发任务可以运行在多个 Promise / Future / Goroutine / Erlang process 这样的协程上。
它们的粒度从大到小如图所示:

在之前的课程里,我们大量应用了线程这种并发工具,在 kv server 的构建过程中,也通过 async/await 用到了 Future 这样的无栈协程。
其实 Rust 的 Future 跟 JavaScript 的 Promise 非常类似。
如果你熟悉 JavaScript,应该熟悉 Promise 的概念,02也简单讲过,它代表了在未来的某个时刻才能得到的结果的值,Promise 一般存在三个状态;
- 初始状态,Promise 还未运行;
- 等待(pending)状态,Promise 已运行,但还未结束;
- 结束状态,Promise 成功解析出一个值,或者执行失败。
只不过 JavaScript 的 Promise 和线程类似,一旦创建就开始执行,对 Promise await 只是为了“等待”并获取解析出来的值;而 Rust 的 Future,只有在主动 await 后才开始执行。
讲到这里估计你也看出来了,谈 Future 的时候,我们总会谈到 async/await。一般而言,async 定义了一个可以并发执行的任务,而 await 则触发这个任务并发执行。大多数语言,包括 Rust,async/await 都是一个语法糖(syntactic sugar),它们使用状态机将 Promise/Future 这样的结构包装起来进行处理。
这一讲我们先把内部的实现放在一边,主要聊 Future/async/await 的基本概念和使用方法,下一讲再来详细介绍它们的原理。
为什么需要 Future?
首先,谈一谈为什么需要 Future 这样的并发结构。
在 Future 出现之前,我们的 Rust 代码都是同步的。也就是说,当你执行一个函数,CPU 处理完函数中的每一个指令才会返回。如果这个函数里有 IO 的操作,实际上,操作系统会把函数对应的线程挂起,放在一个等待队列中,直到 IO 操作完成,才恢复这个线程,并从挂起的位置继续执行下去。
这个模型非常简单直观,代码是一行一行执行的,开发者并不需要考虑哪些操作会阻塞,哪些不会,只关心他的业务逻辑就好。
然而,随着 CPU 技术的不断发展,新世纪应用软件的主要矛盾不再是 CPU 算力不足,而是过于充沛的 CPU 算力和提升缓慢的 IO 速度之间的矛盾。如果有大量的 IO 操作,你的程序大部分时间并没有在运算,而是在不断地等待 IO。
我们来看一个例子(代码):
use anyhow::Result;
use serde_yaml::Value;
use std::fs;
fn main() -> Result<()> {
// 读取 Cargo.toml,IO 操作 1
let content1 = fs::read_to_string("./Cargo.toml")?;
// 读取 Cargo.lock,IO 操作 2
let content2 = fs::read_to_string("./Cargo.lock")?;
// 计算
let yaml1 = toml2yaml(&content1)?;
let yaml2 = toml2yaml(&content2)?;
// 写入 /tmp/Cargo.yml,IO 操作 3
fs::write("/tmp/Cargo.yml", &yaml1)?;
// 写入 /tmp/Cargo.lock,IO 操作 4
fs::write("/tmp/Cargo.lock", &yaml2)?;
// 打印
println!("{}", yaml1);
println!("{}", yaml2);
Ok(())
}
fn toml2yaml(content: &str) -> Result<String> {
let value: Value = toml::from_str(&content)?;
Ok(serde_yaml::to_string(&value)?)
}
这段代码读取 Cargo.toml 和 Cargo.lock 将其转换成 yaml,再分别写入到 /tmp 下。
虽然说这段代码的逻辑并没有问题,但性能有很大的问题。在读 Cargo.toml 时,整个主线程被阻塞,直到 Cargo.toml 读完,才能继续读下一个待处理的文件。整个主线程,只有在运行 toml2yaml 的时间片内,才真正在执行计算任务,之前的读取文件以及之后的写入文件,CPU 都在闲置。
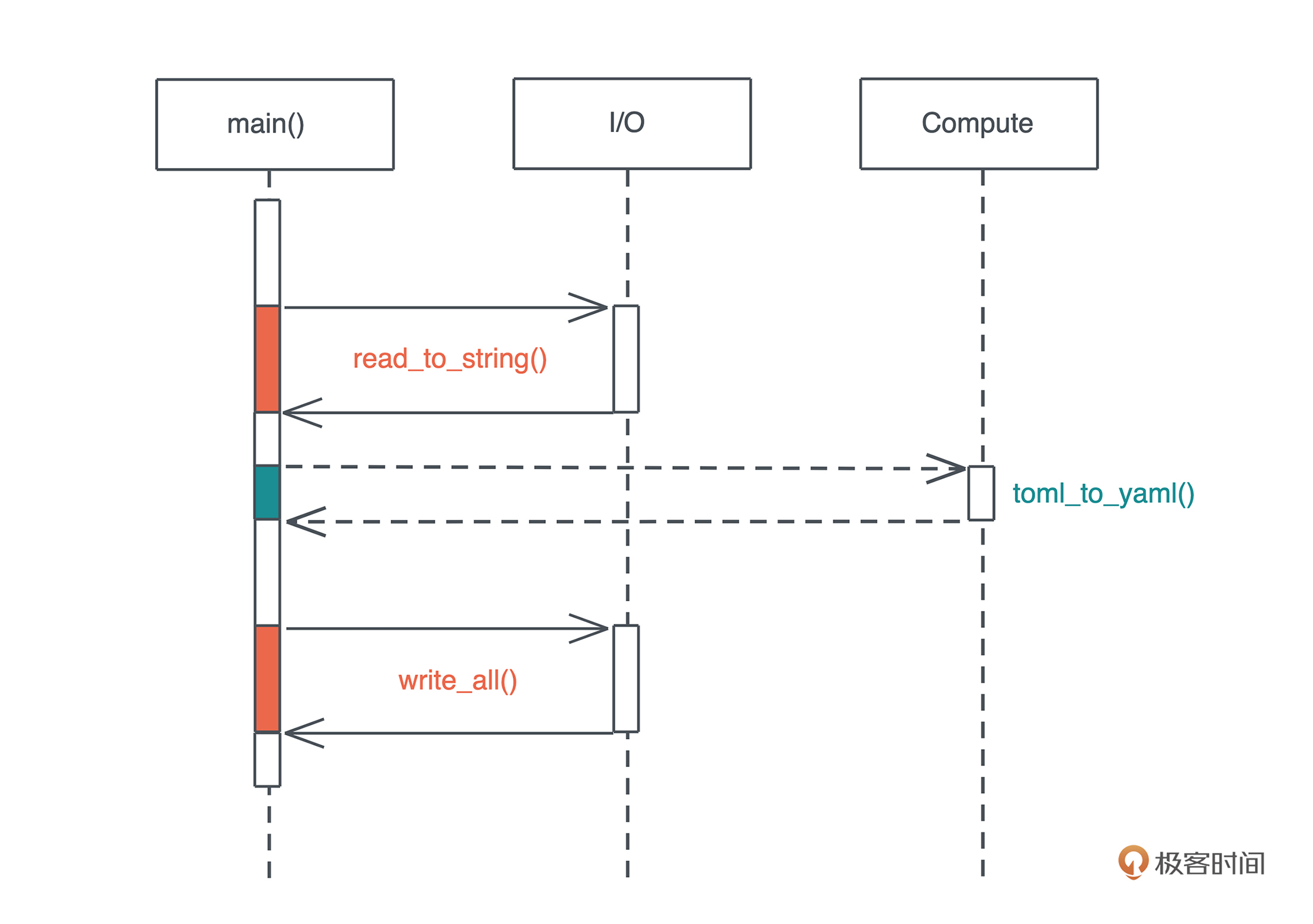
当然,你会辩解,在读文件的过程中,我们不得不等待,因为 toml2yaml 函数的执行有赖于读取文件的结果。嗯没错,但是,这里还有很大的 CPU 浪费:我们读完第一个文件才开始读第二个文件,有没有可能两个文件同时读取呢?这样总共等待的时间是 max(time_for_file1, time_for_file2),而非 time_for_file1 + time_for_file2 。
这并不难,我们可以把文件读取和写入的操作放入单独的线程中执行,比如(代码):
use anyhow::{anyhow, Result};
use serde_yaml::Value;
use std::{
fs,
thread::{self, JoinHandle},
};
/// 包装一下 JoinHandle,这样可以提供额外的方法
struct MyJoinHandle<T>(JoinHandle<Result<T>>);
impl<T> MyJoinHandle<T> {
/// 等待 thread 执行完(类似 await)
pub fn thread_await(self) -> Result<T> {
self.0.join().map_err(|_| anyhow!("failed"))?
}
}
fn main() -> Result<()> {
// 读取 Cargo.toml,IO 操作 1
let t1 = thread_read("./Cargo.toml");
// 读取 Cargo.lock,IO 操作 2
let t2 = thread_read("./Cargo.lock");
let content1 = t1.thread_await()?;
let content2 = t2.thread_await()?;
// 计算
let yaml1 = toml2yaml(&content1)?;
let yaml2 = toml2yaml(&content2)?;
// 写入 /tmp/Cargo.yml,IO 操作 3
let t3 = thread_write("/tmp/Cargo.yml", yaml1);
// 写入 /tmp/Cargo.lock,IO 操作 4
let t4 = thread_write("/tmp/Cargo.lock", yaml2);
let yaml1 = t3.thread_await()?;
let yaml2 = t4.thread_await()?;
fs::write("/tmp/Cargo.yml", &yaml1)?;
fs::write("/tmp/Cargo.lock", &yaml2)?;
// 打印
println!("{}", yaml1);
println!("{}", yaml2);
Ok(())
}
fn thread_read(filename: &'static str) -> MyJoinHandle<String> {
let handle = thread::spawn(move || {
let s = fs::read_to_string(filename)?;
Ok::<_, anyhow::Error>(s)
});
MyJoinHandle(handle)
}
fn thread_write(filename: &'static str, content: String) -> MyJoinHandle<String> {
let handle = thread::spawn(move || {
fs::write(filename, &content)?;
Ok::<_, anyhow::Error>(content)
});
MyJoinHandle(handle)
}
fn toml2yaml(content: &str) -> Result<String> {
let value: Value = toml::from_str(&content)?;
Ok(serde_yaml::to_string(&value)?)
}
这样,读取或者写入多个文件的过程并发执行,使等待的时间大大缩短。
但是,如果要同时读取 100 个文件呢?显然,创建 100 个线程来做这样的事情不是一个好主意。在操作系统中,线程的数量是有限的,创建/阻塞/唤醒/销毁线程,都涉及不少的动作,每个线程也都会被分配一个不小的调用栈,所以从 CPU 和内存的角度来看,创建过多的线程会大大增加系统的开销。
其实,绝大多数操作系统对 I/O 操作提供了非阻塞接口,也就是说,你可以发起一个读取的指令,自己处理类似 EWOULDBLOCK这样的错误码,来更好地在同一个线程中处理多个文件的 IO,而不是依赖操作系统通过调度帮你完成这件事。
不过这样就意味着,你需要定义合适的数据结构来追踪每个文件的读取,在用户态进行相应的调度,阻塞等待 IO 的数据结构的运行,让没有等待 IO 的数据结构得到机会使用 CPU,以及当 IO 操作结束后,恢复等待 IO 的数据结构的运行等等。这样的操作粒度更小,可以最大程度利用 CPU 资源。这就是类似 Future 这样的并发结构的主要用途。
然而,如果这么处理,我们需要在用户态做很多事情,包括处理 IO 任务的事件通知、创建 Future、合理地调度 Future。这些事情,统统交给开发者做显然是不合理的。所以,Rust 提供了相应处理手段 async/await :async 来方便地生成 Future,await 来触发 Future 的调度和执行。
我们看看,同样的任务,如何用 async/await 更高效地处理(代码):
use anyhow::Result;
use serde_yaml::Value;
use tokio::{fs, try_join};
#[tokio::main]
async fn main() -> Result<()> {
// 读取 Cargo.toml,IO 操作 1
let f1 = fs::read_to_string("./Cargo.toml");
// 读取 Cargo.lock,IO 操作 2
let f2 = fs::read_to_string("./Cargo.lock");
let (content1, content2) = try_join!(f1, f2)?;
// 计算
let yaml1 = toml2yaml(&content1)?;
let yaml2 = toml2yaml(&content2)?;
// 写入 /tmp/Cargo.yml,IO 操作 3
let f3 = fs::write("/tmp/Cargo.yml", &yaml1);
// 写入 /tmp/Cargo.lock,IO 操作 4
let f4 = fs::write("/tmp/Cargo.lock", &yaml2);
try_join!(f3, f4)?;
// 打印
println!("{}", yaml1);
println!("{}", yaml2);
Ok(())
}
fn toml2yaml(content: &str) -> Result<String> {
let value: Value = toml::from_str(&content)?;
Ok(serde_yaml::to_string(&value)?)
}
在这段代码里,我们使用了 tokio::fs,而不是 std::fs,tokio::fs 的文件操作都会返回一个 Future,然后可以 join 这些 Future,得到它们运行后的结果。join / try_join 是用来轮询多个 Future 的宏,它会依次处理每个 Future,遇到阻塞就处理下一个,直到所有 Future 产生结果。
整个等待文件读取的时间是 max(time_for_file1, time_for_file2),性能和使用线程的版本几乎一致,但是消耗的资源(主要是线程)要少很多。
建议你好好对比这三个版本的代码,写一写,运行一下,感受它们的处理逻辑。注意在最后的 async/await 的版本中,我们不能把代码写成这样:
// 读取 Cargo.toml,IO 操作 1
let content1 = fs::read_to_string("./Cargo.toml").await?;
// 读取 Cargo.lock,IO 操作 2
let content1 = fs::read_to_string("./Cargo.lock").await?;
这样写的话,和第一版同步的版本没有区别,因为 await 会运行 Future 直到 Future 执行结束,所以依旧是先读取 Cargo.toml,再读取 Cargo.lock,并没有达到并发的效果。
深入了解
好,了解了 Future 在软件开发中的必要性,来深入研究一下 Future/async/await。
在前面代码撰写过程中,不知道你有没有发现,异步函数(async fn)的返回值是一个奇怪的 impl Future 的结构:

我们知道,一般会用 impl 关键字为数据结构实现 trait,也就是说接在 impl 关键字后面的东西是一个 trait,所以,显然 Future 是一个 trait,并且还有一个关联类型 Output。
来看 Future 的定义:
pub trait Future {
type Output;
fn poll(self: Pin<&mut Self>, cx: &mut Context<'_>) -> Poll<Self::Output>;
}
pub enum Poll<T> {
Ready(T),
Pending,
}
除了 Output 外,它还有一个 poll() 方法,这个方法返回 PollSelf::Output。而 Poll 是个 enum,包含 Ready 和 Pending 两个状态。显然,当 Future 返回 Pending 状态时,活还没干完,但干不下去了,需要阻塞一阵子,等某个事件将其唤醒;当 Future 返回 Ready 状态时,Future 对应的值已经得到,此时可以返回了。
你看,这样一个简单的数据结构,就托起了庞大的 Rust 异步 async/await 处理的生态。
回到 async fn 的返回值我们接着说,显然它是一个 impl Future,那么如果我们给一个普通的函数返回 impl Future,它的行为和 async fn 是不是一致呢?来写个简单的实验(代码):
use futures::executor::block_on;
use std::future::Future;
#[tokio::main]
async fn main() {
let name1 = "Tyr".to_string();
let name2 = "Lindsey".to_string();
say_hello1(&name1).await;
say_hello2(&name2).await;
// Future 除了可以用 await 来执行外,还可以直接用 executor 执行
block_on(say_hello1(&name1));
block_on(say_hello2(&name2));
}
async fn say_hello1(name: &str) -> usize {
println!("Hello {}", name);
42
}
// async fn 关键字相当于一个返回 impl Future<Output> 的语法糖
fn say_hello2<'fut>(name: &'fut str) -> impl Future<Output = usize> + 'fut {
async move {
println!("Hello {}", name);
42
}
}
运行这段代码你会发现,say_hello1 和 say_hello2 是等价的,二者都可以使用 await 来执行,也可以将其提供给一个 executor 来执行。
这里我们见到了一个新的名词:executor。
什么是 executor?
你可以把 executor 大致想象成一个 Future 的调度器。对于线程来说,操作系统负责调度;但操作系统不会去调度用户态的协程(比如 Future),所以任何使用了协程来处理并发的程序,都需要有一个 executor 来负责协程的调度。
很多在语言层面支持协程的编程语言,比如 Golang / Erlang,都自带一个用户态的调度器。Rust 虽然也提供 Future 这样的协程,但它在语言层面并不提供 executor,把要不要使用 executor 和使用什么样的 executor 的自主权交给了开发者。好处是,当我的代码中不需要使用协程时,不需要引入任何运行时;而需要使用协程时,可以在生态系统中选择最合适我应用的 executor。
常见的 executor 有:
- futures 库自带的很简单的 executor,上面的代码就使用了它的 block_on 函数;
- tokio 提供的 executor,当使用 #[tokio::main] 时,就隐含引入了 tokio 的 executor;
- async-std 提供的 executor,和 tokio 类似;
- smol 提供的 async-executor,主要提供了 block_on。
注意,上面的代码我们混用了 #[tokio::main] 和 futures:executor::block_on,这只是为了展示 Future 使用的不同方式,在正式代码里,不建议混用不同的 executor,会降低程序的性能,还可能引发奇怪的问题。
当我们谈到 executor 时,就不得不提 reactor,它俩都是 Reactor Pattern 的组成部分,作为构建高性能事件驱动系统的一个很典型模式,Reactor pattern 它包含三部分:
- task,待处理的任务。任务可以被打断,并且把控制权交给 executor,等待之后的调度;
- executor,一个调度器。维护等待运行的任务(ready queue),以及被阻塞的任务(wait queue);
- reactor,维护事件队列。当事件来临时,通知 executor 唤醒某个任务等待运行。
executor 会调度执行待处理的任务,当任务无法继续进行却又没有完成时,它会挂起任务,并设置好合适的唤醒条件。之后,如果 reactor 得到了满足条件的事件,它会唤醒之前挂起的任务,然后 executor 就有机会继续执行这个任务。这样一直循环下去,直到任务执行完毕。
怎么用 Future 做异步处理?
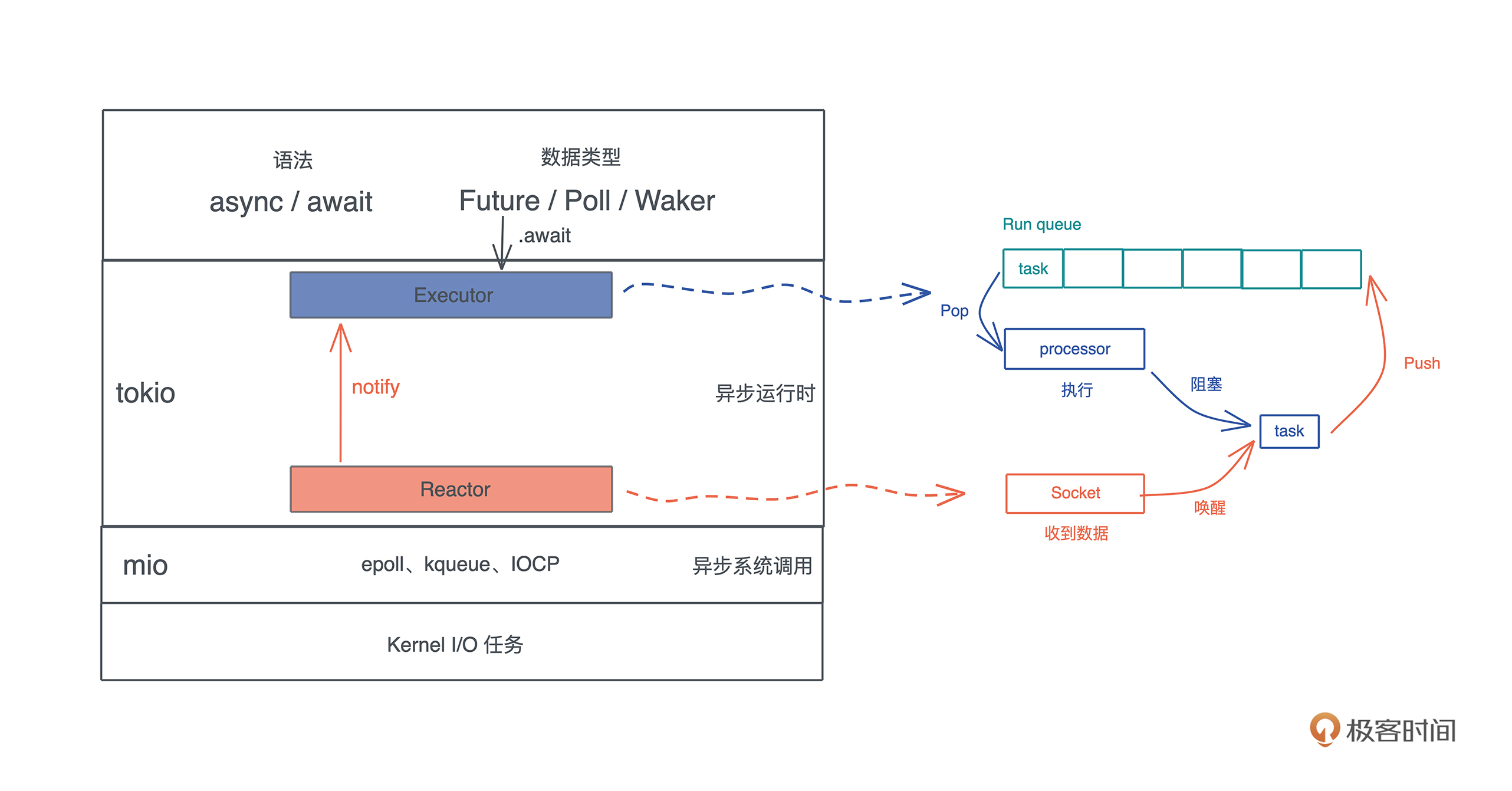
理解了 Reactor pattern 后,Rust 使用 Future 做异步处理的整个结构就清晰了,我们以 tokio 为例:async/await 提供语法层面的支持,Future 是异步任务的数据结构,当 fut.await 时,executor 就会调度并执行它。
tokio 的调度器(executor)会运行在多个线程上,运行线程自己的 ready queue 上的任务(Future),如果没有,就去别的线程的调度器上“偷”一些过来运行。当某个任务无法再继续取得进展,此时 Future 运行的结果是 Poll::Pending,那么调度器会挂起任务,并设置好合适的唤醒条件(Waker),等待被 reactor 唤醒。
而 reactor 会利用操作系统提供的异步 I/O,比如 epoll / kqueue / IOCP,来监听操作系统提供的 IO 事件,当遇到满足条件的事件时,就会调用 Waker.wake() 唤醒被挂起的 Future。这个 Future 会回到 ready queue 等待执行。
整个流程如下:
我们以一个具体的代码示例来进一步理解这个过程(代码):
use anyhow::Result;
use futures::{SinkExt, StreamExt};
use tokio::net::TcpListener;
use tokio_util::codec::{Framed, LinesCodec};
#[tokio::main]
async fn main() -> Result<()> {
let addr = "0.0.0.0:8080";
let listener = TcpListener::bind(addr).await?;
println!("listen to: {}", addr);
loop {
let (stream, addr) = listener.accept().await?;
println!("Accepted: {:?}", addr);
tokio::spawn(async move {
// 使用 LinesCodec 把 TCP 数据切成一行行字符串处理
let framed = Framed::new(stream, LinesCodec::new());
// split 成 writer 和 reader
let (mut w, mut r) = framed.split();
for line in r.next().await {
// 每读到一行就加个前缀发回
w.send(format!("I got: {}", line?)).await?;
}
Ok::<_, anyhow::Error>(())
});
}
}
这是一个简单的 TCP 服务器,服务器每收到一个客户端的请求,就会用 tokio::spawn 创建一个异步任务,放入 executor 中执行。这个异步任务接受客户端发来的按行分隔(分隔符是 “\r\n”)的数据帧,服务器每收到一行,就加个前缀把内容也按行发回给客户端。
你可以用 telnet 和这个服务器交互:
❯ telnet localhost 8080
Trying 127.0.0.1...
Connected to localhost.
Escape character is '^]'.
hello
I got: hello
Connection closed by foreign host.
假设我们在客户端输入了很大的一行数据,服务器在做 r.next().await 在执行的时候,收不完一行的数据,因而这个 Future 返回 Poll::Pending,此时它被挂起。当后续客户端的数据到达时,reactor 会知道这个 socket 上又有数据了,于是找到 socket 对应的 Future,将其唤醒,继续接收数据。
这样反复下去,最终 r.next().await 得到 Poll::Ready(Ok(line)),于是它返回 Ok(line),程序继续往下走,进入到 w.send() 的阶段。
从这段代码中你可以看到,在 Rust 下使用异步处理是一件非常简单的事情,除了几个你可能不太熟悉的概念,比如今天讲到的用于创建 Future 的 async 关键字,用于执行和等待 Future 执行完毕的 await 关键字,以及用于调度 Future 执行的运行时 #[tokio:main] 外,整体的代码和使用线程处理的代码完全一致。所以,它的上手难度非常低,很容易使用。
使用 Future 的注意事项
目前我们已经基本明白 Future 运行的基本原理了,也可以在程序的不同部分自如地使用 Future/async/await 来进行异步处理。
但是要注意,不是所有的应用场景都适合用 async/await,在使用的时候,有一些不容易注意到的坑需要我们妥善考虑。
1. 处理计算密集型任务时
当你要处理的任务是 CPU 密集型,而非 IO 密集型,更适合使用线程,而非 Future。
这是因为 Future 的调度是协作式多任务(Cooperative Multitasking),也就是说,除非 Future 主动放弃 CPU,不然它就会一直被执行,直到运行结束。我们看一个例子(代码):
use anyhow::Result;
use std::time::Duration;
// 强制 tokio 只使用一个工作线程,这样 task 2 不会跑到其它线程执行
#[tokio::main(worker_threads = 1)]
async fn main() -> Result<()> {
// 先开始执行 task 1 的话会阻塞,让 task 2 没有机会运行
tokio::spawn(async move {
eprintln!("task 1");
// 试试把这句注释掉看看会产生什么结果
// tokio::time::sleep(Duration::from_millis(1)).await;
loop {}
});
tokio::spawn(async move {
eprintln!("task 2");
});
tokio::time::sleep(Duration::from_millis(1)).await;
Ok(())
}
task 1 里有一个死循环,你可以把它想象成是执行时间很长又不包括 IO 处理的代码。运行这段代码,你会发现,task 2 没有机会得到执行。这是因为 task 1 不执行结束,或者不让出 CPU,task 2 没有机会被调度。
如果你的确需要在 tokio(或者其它异步运行时)下运行运算量很大的代码,那么最好使用 yield 来主动让出 CPU,比如 tokio::task::yield_now()。这样可以避免某个计算密集型的任务饿死其它任务。
2. 异步代码中使用Mutex时
大部分时候,标准库的 Mutex 可以用在异步代码中,而且,这是推荐的用法。
然而,标准库的 MutexGuard 不能安全地跨越 await,所以,当我们需要获得锁之后执行异步操作,必须使用 tokio 自带的 Mutex,看下面的例子(代码):
use anyhow::Result;
use std::{sync::Arc, time::Duration};
use tokio::sync::Mutex;
struct DB;
impl DB {
// 假装在 commit 数据
async fn commit(&mut self) -> Result<usize> {
Ok(42)
}
}
#[tokio::main]
async fn main() -> Result<()> {
let db1 = Arc::new(Mutex::new(DB));
let db2 = Arc::clone(&db1);
tokio::spawn(async move {
let mut db = db1.lock().await;
// 因为拿到的 MutexGuard 要跨越 await,所以不能用 std::sync::Mutex
// 只能用 tokio::sync::Mutex
let affected = db.commit().await?;
println!("db1: Total affected rows: {}", affected);
Ok::<_, anyhow::Error>(())
});
tokio::spawn(async move {
let mut db = db2.lock().await;
let affected = db.commit().await?;
println!("db2: Total affected rows: {}", affected);
Ok::<_, anyhow::Error>(())
});
// 让两个 task 有机会执行完
tokio::time::sleep(Duration::from_millis(1)).await;
Ok(())
}
这个例子模拟了一个数据库的异步 commit() 操作。如果我们需要在多个 tokio task 中使用这个 DB,需要使用 Arc<Mutext>。然而,db1.lock() 拿到锁后,我们需要运行 db.commit().await,这是一个异步操作。
前面讲过,因为 tokio 实现了 work-stealing 调度,Future 有可能在不同的线程中执行,普通的 MutexGuard 编译直接就会出错,所以需要使用 tokio 的 Mutex。更多信息可以看文档。
在这个例子里,我们又见识到了 Rust 编译器的伟大之处:如果一件事,它觉得你不能做,会通过编译器错误阻止你,而不是任由编译通过,然后让程序在运行过程中听天由命,让你无休止地和捉摸不定的并发 bug 斗争。
3. 在线程和异步任务间做同步时
在一个复杂的应用程序中,会兼有计算密集和 IO 密集的任务。
前面说了,要避免在 tokio 这样的异步运行时中运行大量计算密集型的任务,一来效率不高,二来还容易饿死其它任务。
所以,一般的做法是我们使用 channel 来在线程和future两者之间做同步。看一个例子:
use std::thread;
use anyhow::Result;
use blake3::Hasher;
use futures::{SinkExt, StreamExt};
use rayon::prelude::*;
use tokio::{
net::TcpListener,
sync::{mpsc, oneshot},
};
use tokio_util::codec::{Framed, LinesCodec};
pub const PREFIX_ZERO: &[u8] = &[0, 0, 0];
#[tokio::main]
async fn main() -> Result<()> {
let addr = "0.0.0.0:8080";
let listener = TcpListener::bind(addr).await?;
println!("listen to: {}", addr);
// 创建 tokio task 和 thread 之间的 channel
let (sender, mut receiver) = mpsc::unbounded_channel::<(String, oneshot::Sender<String>)>();
// 使用 thread 处理计算密集型任务
thread::spawn(move || {
// 读取从 tokio task 过来的 msg,注意这里用的是 blocking_recv,而非 await
while let Some((line, reply)) = receiver.blocking_recv() {
// 计算 pow
let result = match pow(&line) {
Some((hash, nonce)) => format!("hash: {}, once: {}", hash, nonce),
None => "Not found".to_string(),
};
// 把计算结果从 oneshot channel 里发回
if let Err(e) = reply.send(result) {
println!("Failed to send: {}", e);
}
}
});
// 使用 tokio task 处理 IO 密集型任务
loop {
let (stream, addr) = listener.accept().await?;
println!("Accepted: {:?}", addr);
let sender1 = sender.clone();
tokio::spawn(async move {
// 使用 LinesCodec 把 TCP 数据切成一行行字符串处理
let framed = Framed::new(stream, LinesCodec::new());
// split 成 writer 和 reader
let (mut w, mut r) = framed.split();
for line in r.next().await {
// 为每个消息创建一个 oneshot channel,用于发送回复
let (reply, reply_receiver) = oneshot::channel();
sender1.send((line?, reply))?;
// 接收 pow 计算完成后的 hash 和 nonce
if let Ok(v) = reply_receiver.await {
w.send(format!("Pow calculated: {}", v)).await?;
}
}
Ok::<_, anyhow::Error>(())
});
}
}
// 使用 rayon 并发计算 u32 空间下所有 nonce,直到找到有头 N 个 0 的哈希
pub fn pow(s: &str) -> Option<(String, u32)> {
let hasher = blake3_base_hash(s.as_bytes());
let nonce = (0..u32::MAX).into_par_iter().find_any(|n| {
let hash = blake3_hash(hasher.clone(), n).as_bytes().to_vec();
&hash[..PREFIX_ZERO.len()] == PREFIX_ZERO
});
nonce.map(|n| {
let hash = blake3_hash(hasher, &n).to_hex().to_string();
(hash, n)
})
}
// 计算携带 nonce 后的哈希
fn blake3_hash(mut hasher: blake3::Hasher, nonce: &u32) -> blake3::Hash {
hasher.update(&nonce.to_be_bytes()[..]);
hasher.finalize()
}
// 计算数据的哈希
fn blake3_base_hash(data: &[u8]) -> Hasher {
let mut hasher = Hasher::new();
hasher.update(data);
hasher
}
在这个例子里,我们使用了之前撰写的 TCP server,只不过这次,客户端输入过来的一行文字,会被计算出一个 POW(Proof of Work)的哈希:调整 nonce,不断计算哈希,直到哈希的头三个字节全是零为止。服务器要返回计算好的哈希和获得该哈希的 nonce。这是一个典型的计算密集型任务,所以我们需要使用线程来处理它。
而在 tokio task 和 thread 间使用 channel 进行同步。我们使用了一个 ubounded MPSC channel 从 tokio task 侧往 thread 侧发送消息,每条消息都附带一个 oneshot channel 用于 thread 侧往 tokio task 侧发送数据。
建议你仔细读读这段代码,最好自己写一遍,感受一下使用 channel 在计算密集型和 IO 密集型任务同步的方式。如果你用 telnet 连接,发送 “hello world!”,会得到不同的哈希和 nonce,它们都是正确的结果:
❯ telnet localhost 8080
Trying 127.0.0.1...
Connected to localhost.
Escape character is '^]'.
hello world!
Pow calculated: hash: 0000006e6e9370d0f60f06bdc288efafa203fd99b9af0480d040b2cc89c44df0, once: 403407307
Connection closed by foreign host.
❯ telnet localhost 8080
Trying 127.0.0.1...
Connected to localhost.
Escape character is '^]'.
hello world!
Pow calculated: hash: 000000e23f0e9b7aeba9060a17ac676f3341284800a2db843e2f0e85f77f52dd, once: 36169623
Connection closed by foreign host.
小结
通过拆解async fn 有点奇怪的返回值结构,我们学习了 Reactor pattern,大致了解了 tokio 如何通过 executor 和 reactor 共同作用,完成 Future 的调度、执行、阻塞,以及唤醒。这是一个完整的循环,直到 Future 返回 Poll::Ready(T)。
在学习 Future 的使用时,估计你也发现了,我们可以对比线程来学习,可以看到,下列代码的结构多么相似:
fn thread_async() -> JoinHandle<usize> {
thread::spawn(move || {
println!("hello thread!");
42
})
}
fn task_async() -> impl Future<Output = usize> {
async move {
println!("hello async!");
42
}
}
在使用 Future 时,主要有3点注意事项:
- 我们要避免在异步任务中处理大量计算密集型的工作;
- 在使用 Mutex 等同步原语时,要注意标准库的 MutexGuard 无法跨越 .await,所以,此时要使用对异步友好的 Mutex,如 tokio::sync::Mutex;
- 如果要在线程和异步任务间同步,可以使用 channel。
今天为了帮助你深入理解,我们写了很多代码,每一段你都可以再仔细阅读几遍,把它们搞懂,最好自己也能直接写出来,这样你对 Future 才会有更深的理解。
思考题
想想看,为什么标准库的 Mutex 不能跨越 await?你可以把文中使用 tokio::sync::Mutex 的代码改成使用 std::sync::Mutex,并对使用的接口做相应的改动(把 lock().await 改成 lock().unwrap()),看看编译器会报什么错。对着错误提示,你明白为什么了么?
欢迎在留言区分享你的学习感悟和思考。今天你完成Rust学习的第38次打卡啦,感谢你的收听,如果你觉得有收获,也欢迎你分享给身边的朋友,邀他一起讨论。我们下节课见。