21 KiB
33|并发处理(上):从atomics到Channel,Rust都提供了什么工具?
你好,我是陈天。
不知不觉我们已经并肩作战三十多讲了,希望你通过这段时间的学习,有一种“我成为更好的程序员啦!”这样的感觉。这是我想通过介绍 Rust 的思想、处理问题的思路、设计接口的理念等等传递给你的。如今,我们终于来到了备受期待的并发和异步的篇章。
很多人分不清并发和并行的概念,Rob Pike,Golang 的创始人之一,对此有很精辟很直观的解释:
Concurrency is about dealing with lots of things at once. Parallelism is about doing lots of things at once.
并发是一种同时处理很多事情的能力,并行是一种同时执行很多事情的手段。
我们把要做的事情放在多个线程中,或者多个异步任务中处理,这是并发的能力。在多核多 CPU 的机器上同时运行这些线程或者异步任务,是并行的手段。可以说,并发是为并行赋能。当我们具备了并发的能力,并行就是水到渠成的事情。
其实之前已经涉及了很多和并发相关的内容。比如用 std::thread 来创建线程、用 std::sync 下的并发原语(Mutex)来处理并发过程中的同步问题、用 Send/Sync trait 来保证并发的安全等等。
在处理并发的过程中,难点并不在于如何创建多个线程来分配工作,在于如何在这些并发的任务中进行同步。我们来看并发状态下几种常见的工作模式:自由竞争模式、map/reduce 模式、DAG 模式:
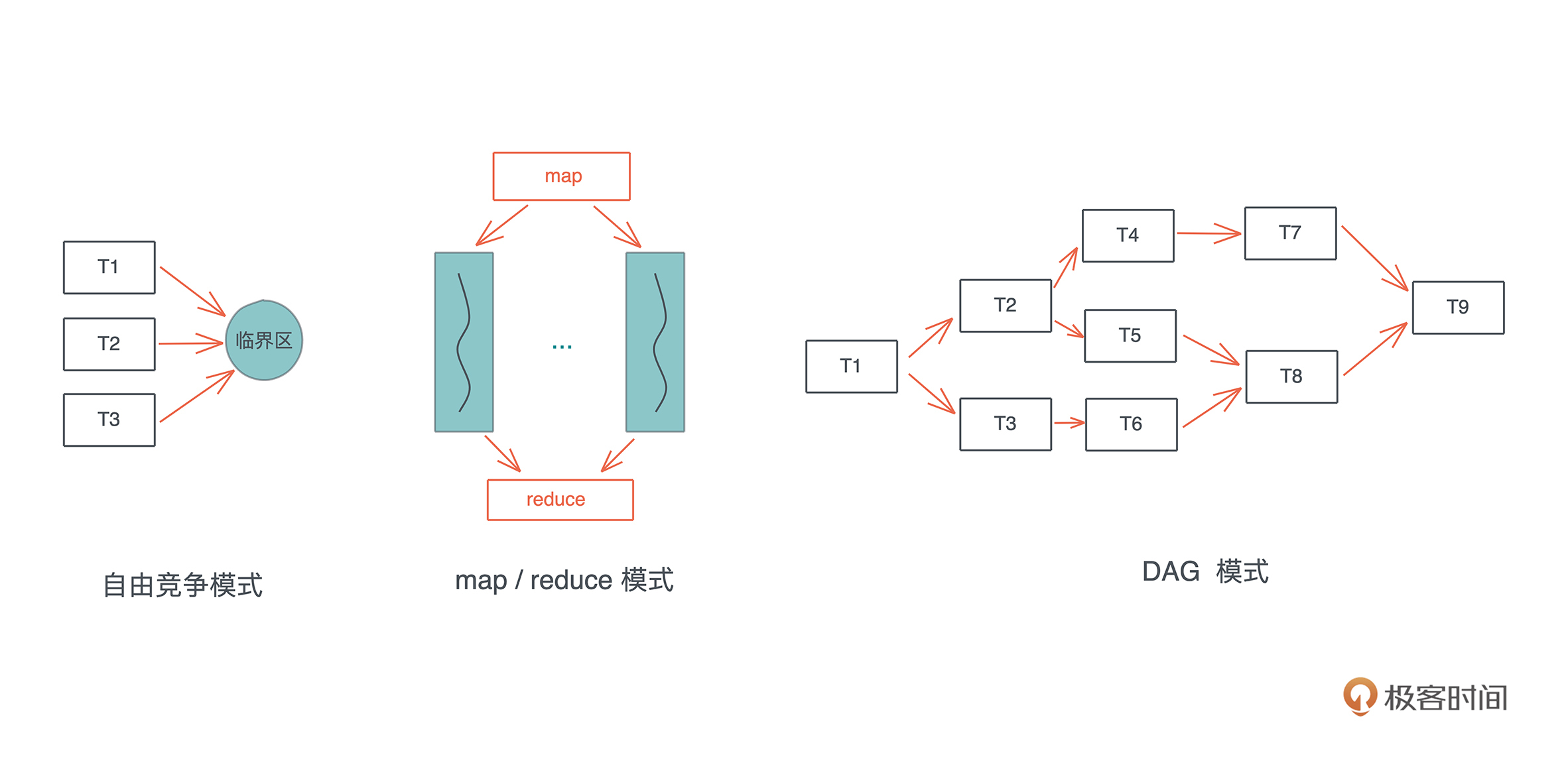
在自由竞争模式下,多个并发任务会竞争同一个临界区的访问权。任务之间在何时、以何种方式去访问临界区,是不确定的,或者说是最为灵活的,只要在进入临界区时获得独占访问即可。
在自由竞争的基础上,我们可以限制并发的同步模式,典型的有 map/reduce 模式和 DAG 模式。map/reduce 模式,把工作打散,按照相同的处理完成后,再按照一定的顺序将结果组织起来;DAG 模式,把工作切成不相交的、有依赖关系的子任务,然后按依赖关系并发执行。
这三种基本模式组合起来,可以处理非常复杂的并发场景。所以,当我们处理复杂问题的时候,应该先厘清其脉络,用分治的思想把问题拆解成正交的子问题,然后组合合适的并发模式来处理这些子问题。
在这些并发模式背后,都有哪些并发原语可以为我们所用呢,这两讲会重点讲解和深入五个概念Atomic、Mutex、Condvar、Channel 和 Actor model。今天先讲前两个Atomic和Mutex。
Atomic
Atomic 是所有并发原语的基础,它为并发任务的同步奠定了坚实的基础。
谈到同步,相信你首先会想到锁,所以在具体介绍 atomic 之前,我们从最基本的锁该如何实现讲起。自由竞争模式下,我们需要用互斥锁来保护某个临界区,使进入临界区的任务拥有独占访问的权限。
为了简便起见,在获取这把锁的时候,如果获取不到,就一直死循环,直到拿到锁为止(代码):
use std::{cell::RefCell, fmt, sync::Arc, thread};
struct Lock<T> {
locked: RefCell<bool>,
data: RefCell<T>,
}
impl<T> fmt::Debug for Lock<T>
where
T: fmt::Debug,
{
fn fmt(&self, f: &mut fmt::Formatter<'_>) -> fmt::Result {
write!(f, "Lock<{:?}>", self.data.borrow())
}
}
// SAFETY: 我们确信 Lock<T> 很安全,可以在多个线程中共享
unsafe impl<T> Sync for Lock<T> {}
impl<T> Lock<T> {
pub fn new(data: T) -> Self {
Self {
data: RefCell::new(data),
locked: RefCell::new(false),
}
}
pub fn lock(&self, op: impl FnOnce(&mut T)) {
// 如果没拿到锁,就一直 spin
while *self.locked.borrow() != false {} // **1
// 拿到,赶紧加锁
*self.locked.borrow_mut() = true; // **2
// 开始干活
op(&mut self.data.borrow_mut()); // **3
// 解锁
*self.locked.borrow_mut() = false; // **4
}
}
fn main() {
let data = Arc::new(Lock::new(0));
let data1 = data.clone();
let t1 = thread::spawn(move || {
data1.lock(|v| *v += 10);
});
let data2 = data.clone();
let t2 = thread::spawn(move || {
data2.lock(|v| *v *= 10);
});
t1.join().unwrap();
t2.join().unwrap();
println!("data: {:?}", data);
}
这段代码模拟了 Mutex 的实现,它的核心部分是 lock() 方法。
我们之前说过,Mutex 在调用 lock() 后,会得到一个 MutexGuard 的 RAII 结构,这里为了简便起见,要求调用者传入一个闭包,来处理加锁后的事务。在 lock() 方法里,拿不到锁的并发任务会一直 spin,拿到锁的任务可以干活,干完活后会解锁,这样之前 spin 的任务会竞争到锁,进入临界区。
这样的实现看上去似乎问题不大,但是你细想,它有好几个问题:
- 在多核情况下,
**1和**2之间,有可能其它线程也碰巧 spin 结束,把 locked 修改为 true。这样,存在多个线程拿到这把锁,破坏了任何线程都有独占访问的保证。 - 即便在单核情况下,
**1和**2之间,也可能因为操作系统的可抢占式调度,导致问题1发生。 - 如今的编译器会最大程度优化生成的指令,如果操作之间没有依赖关系,可能会生成乱序的机器码,比如
**3被优化放在**1之前,从而破坏了这个 lock 的保证。 - 即便编译器不做乱序处理,CPU 也会最大程度做指令的乱序执行,让流水线的效率最高。同样会发生 3 的问题。
所以,我们实现这个锁的行为是未定义的。可能大部分时间如我们所愿,但会随机出现奇奇怪怪的行为。一旦这样的事情发生,bug 可能会以各种不同的面貌出现在系统的各个角落。而且,这样的 bug 几乎是无解的,因为它很难稳定复现,表现行为很不一致,甚至,只在某个 CPU 下出现。
这里再强调一下 unsafe 代码需要足够严谨,需要非常有经验的工程师去审查,这段代码之所以破快了并发安全性,是因为我们错误地认为:为 Lock 实现 Sync,是安全的。
为了解决上面这段代码的问题,我们必须在 CPU 层面做一些保证,让某些操作成为原子操作。
最基础的保证是:可以通过一条指令读取某个内存地址,判断其值是否等于某个前置值,如果相等,将其修改为新的值。这就是 Compare-and-swap 操作,简称CAS。它是操作系统的几乎所有并发原语的基石,使得我们能实现一个可以正常工作的锁。
所以,刚才的代码,我们可以把一开始的循环改成:
while self
.locked
.compare_exchange(false, true, Ordering::Acquire, Ordering::Relaxed)
.is_err() {}
这句的意思是:如果 locked 当前的值是 false,就将其改成 true。这整个操作在一条指令里完成,不会被其它线程打断或者修改;如果 locked 的当前值不是 false,那么就会返回错误,我们会在此不停 spin,直到前置条件得到满足。这里,compare_exchange 是 Rust 提供的 CAS 操作,它会被编译成 CPU 的对应 CAS 指令。
当这句执行成功后,locked 必然会被改变为 true,我们成功拿到了锁,而任何其他线程都会在这句话上 spin。
同样在释放锁的时候,相应地需要使用 atomic 的版本,而非直接赋值成 false:
self.locked.store(false, Ordering::Release);
当然,为了配合这样的改动,我们还需要把 locked 从 bool 改成 AtomicBool。在 Rust里,std::sync::atomic 有大量的 atomic 数据结构,对应各种基础结构。我们看使用了 AtomicBool 的新实现(代码):
use std::{
cell::RefCell,
fmt,
sync::{
atomic::{AtomicBool, Ordering},
Arc,
},
thread,
};
struct Lock<T> {
locked: AtomicBool,
data: RefCell<T>,
}
impl<T> fmt::Debug for Lock<T>
where
T: fmt::Debug,
{
fn fmt(&self, f: &mut fmt::Formatter<'_>) -> fmt::Result {
write!(f, "Lock<{:?}>", self.data.borrow())
}
}
// SAFETY: 我们确信 Lock<T> 很安全,可以在多个线程中共享
unsafe impl<T> Sync for Lock<T> {}
impl<T> Lock<T> {
pub fn new(data: T) -> Self {
Self {
data: RefCell::new(data),
locked: AtomicBool::new(false),
}
}
pub fn lock(&self, op: impl FnOnce(&mut T)) {
// 如果没拿到锁,就一直 spin
while self
.locked
.compare_exchange(false, true, Ordering::Acquire, Ordering::Relaxed)
.is_err()
{} // **1
// 已经拿到并加锁,开始干活
op(&mut self.data.borrow_mut()); // **3
// 解锁
self.locked.store(false, Ordering::Release);
}
}
fn main() {
let data = Arc::new(Lock::new(0));
let data1 = data.clone();
let t1 = thread::spawn(move || {
data1.lock(|v| *v += 10);
});
let data2 = data.clone();
let t2 = thread::spawn(move || {
data2.lock(|v| *v *= 10);
});
t1.join().unwrap();
t2.join().unwrap();
println!("data: {:?}", data);
}
可以看到,通过使用 compare_exchange ,规避了 1 和 2 面临的问题,但对于和编译器/CPU自动优化相关的 3 和 4,我们还需要一些额外处理。这就是这个函数里额外的两个和 Ordering 有关的奇怪参数。
如果你查看 atomic 的文档,可以看到 Ordering 是一个 enum:
pub enum Ordering {
Relaxed,
Release,
Acquire,
AcqRel,
SeqCst,
}
文档里解释了几种 Ordering 的用途,我来稍稍扩展一下。
第一个Relaxed,这是最宽松的规则,它对编译器和 CPU 不做任何限制,可以乱序执行。
Release,当我们写入数据(比如上面代码里的 store)的时候,如果用了 Release order,那么:
- 对于当前线程,任何读取或写入操作都不能被乱序排在这个 store 之后。也就是说,在上面的例子里,CPU 或者编译器不能把
**3挪到**4之后执行。 - 对于其它线程,如果使用了
Acquire来读取这个 atomic 的数据, 那么它们看到的是修改后的结果。上面代码我们在compare_exchange里使用了Acquire来读取,所以能保证读到最新的值。
而Acquire是当我们读取数据的时候,如果用了 Acquire order,那么:
- 对于当前线程,任何读取或者写入操作都不能被乱序排在这个读取之前。在上面的例子里,CPU 或者编译器不能把
**3挪到**1之前执行。 - 对于其它线程,如果使用了
Release来修改数据,那么,修改的值对当前线程可见。
第四个AcqRel是Acquire 和 Release 的结合,同时拥有 Acquire 和 Release 的保证。这个一般用在 fetch_xxx 上,比如你要对一个 atomic 自增 1,你希望这个操作之前和之后的读取或写入操作不会被乱序,并且操作的结果对其它线程可见。
最后的SeqCst是最严格的 ordering,除了 AcqRel 的保证外,它还保证所有线程看到的所有 SeqCst 操作的顺序是一致的。
因为 CAS 和 ordering 都是系统级的操作,所以这里描述的 Ordering 的用途在各种语言中都大同小异。对于 Rust 来说,它的 atomic 原语继承于 C++。如果读 Rust 的文档你感觉云里雾里,那么 C++ 关于 ordering 的文档要清晰得多。
其实上面获取锁的 spin 过程性能不够好,更好的方式是这样处理一下:
while self
.locked
.compare_exchange(false, true, Ordering::Acquire, Ordering::Relaxed)
.is_err()
{
// 性能优化:compare_exchange 需要独占访问,当拿不到锁时,我们
// 先不停检测 locked 的状态,直到其 unlocked 后,再尝试拿锁
while self.locked.load(Ordering::Relaxed) == true {}
}
注意,我们在 while loop 里,又嵌入了一个 loop。这是因为 CAS 是个代价比较高的操作,它需要获得对应内存的独占访问(exclusive access),我们希望失败的时候只是简单读取 atomic 的状态,只有符合条件的时候再去做独占访问,进行 CAS。所以,看上去多做了一层循环,实际代码的效率更高。
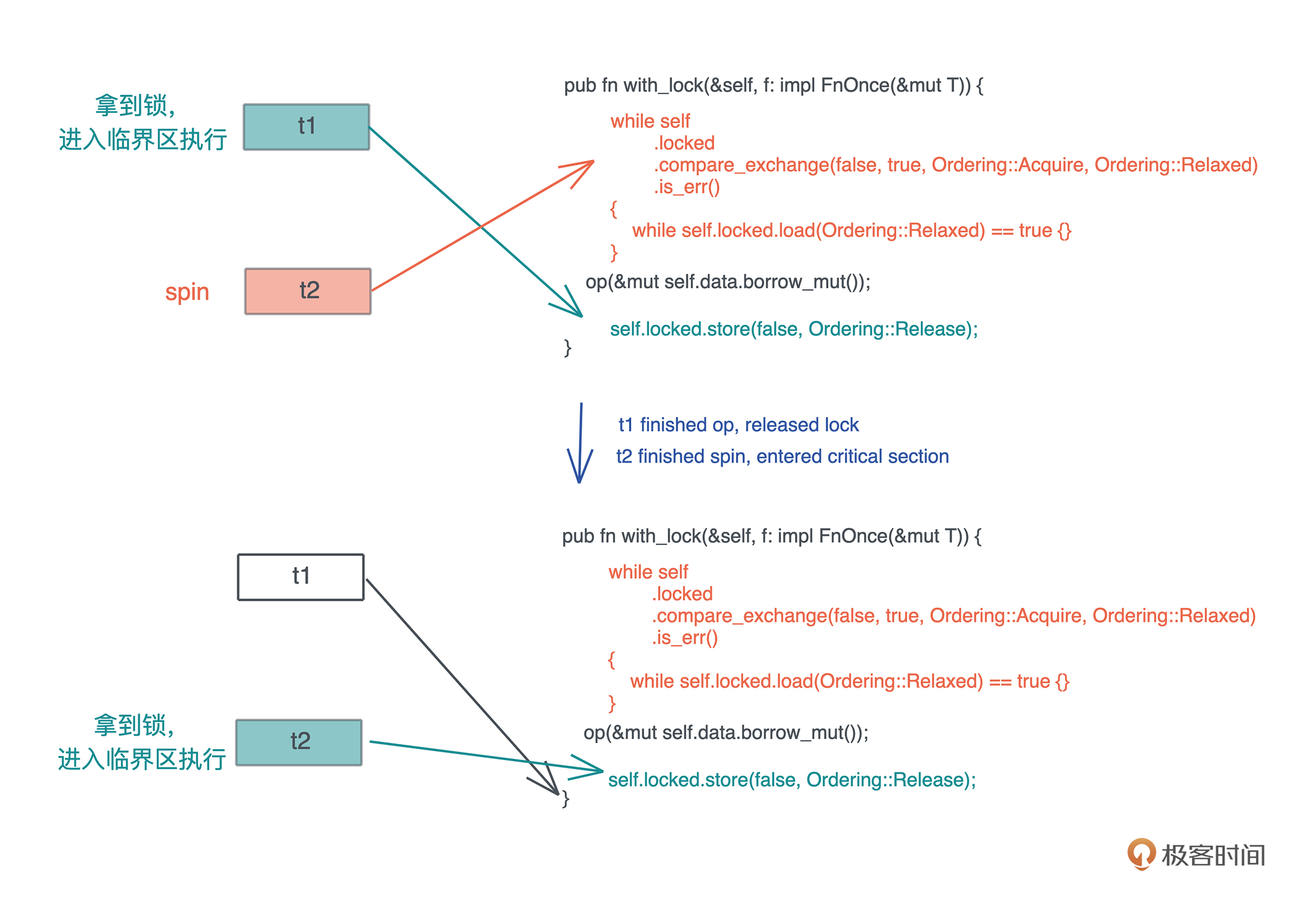
以下是两个线程同步的过程,一开始 t1 拿到锁、t2 spin,之后 t1 释放锁、t2 进入到临界区执行:
讲到这里,相信你对 atomic 以及其背后的 CAS 有初步的了解了。那么,atomic 除了做其它并发原语,还有什么作用?
我个人用的最多的是做各种 lock-free 的数据结构。比如,需要一个全局的 ID 生成器。当然可以使用 UUID 这样的模块来生成唯一的 ID,但如果我们同时需要这个 ID 是有序的,那么 AtomicUsize 就是最好的选择。
你可以用 fetch_add 来增加这个 ID,而 fetch_add 返回的结果就可以用于当前的 ID。这样,不需要加锁,就得到了一个可以在多线程中安全使用的 ID 生成器。
另外,atomic 还可以用于记录系统的各种 metrics。比如一个简单的 in-memory Metrics 模块:
use std::{
collections::HashMap,
sync::atomic::{AtomicUsize, Ordering},
};
// server statistics
pub struct Metrics(HashMap<&'static str, AtomicUsize>);
impl Metrics {
pub fn new(names: &[&'static str]) -> Self {
let mut metrics: HashMap<&'static str, AtomicUsize> = HashMap::new();
for name in names.iter() {
metrics.insert(name, AtomicUsize::new(0));
}
Self(metrics)
}
pub fn inc(&self, name: &'static str) {
if let Some(m) = self.0.get(name) {
m.fetch_add(1, Ordering::Relaxed);
}
}
pub fn add(&self, name: &'static str, val: usize) {
if let Some(m) = self.0.get(name) {
m.fetch_add(val, Ordering::Relaxed);
}
}
pub fn dec(&self, name: &'static str) {
if let Some(m) = self.0.get(name) {
m.fetch_sub(1, Ordering::Relaxed);
}
}
pub fn snapshot(&self) -> Vec<(&'static str, usize)> {
self.0
.iter()
.map(|(k, v)| (*k, v.load(Ordering::Relaxed)))
.collect()
}
}
它允许你初始化一个全局的 metrics 表,然后在程序的任何地方,无锁地操作相应的 metrics:
lazy_static! {
pub(crate) static ref METRICS: Metrics = Metrics::new(&[
"topics",
"clients",
"peers",
"broadcasts",
"servers",
"states",
"subscribers"
]);
}
fn main() {
METRICS.inc("topics");
METRICS.inc("subscribers");
println!("{:?}", METRICS.snapshot());
}
完整代码见 GitHub repo 或者 playground。
Mutex
Atomic 虽然可以处理自由竞争模式下加锁的需求,但毕竟用起来不那么方便,我们需要更高层的并发原语,来保证软件系统控制多个线程对同一个共享资源的访问,使得每个线程在访问共享资源的时候,可以独占或者说互斥访问(mutual exclusive access)。
我们知道,对于一个共享资源,如果所有线程只做读操作,那么无需互斥,大家随时可以访问,很多 immutable language(如 Erlang / Elixir)做了语言层面的只读保证,确保了并发环境下的无锁操作。这牺牲了一些效率(常见的 list/hashmap 需要使用 persistent data structure),额外做了不少内存拷贝,换来了并发控制下的简单轻灵。
然而,一旦有任何一个或多个线程要修改共享资源,不但写者之间要互斥,读写之间也需要互斥。毕竟如果读写之间不互斥的话,读者轻则读到脏数据,重则会读到已经被破坏的数据,导致 crash。比如读者读到链表里的一个节点,而写者恰巧把这个节点的内存释放掉了,如果不做互斥访问,系统一定会崩溃。
所以操作系统提供了用来解决这种读写互斥问题的基本工具:Mutex(RwLock 我们放下不表)。
其实上文中,为了展示如何使用 atomic,我们制作了一个非常粗糙简单的 SpinLock,就可以看做是一个广义的 Mutex。SpinLock,顾名思义,就是线程通过 CPU 空转(spin,就像前面的 while loop)忙等(busy wait),来等待某个临界区可用的一种锁。
然而,这种通过 SpinLock 做互斥的实现方式有使用场景的限制:如果受保护的临界区太大,那么整体的性能会急剧下降, CPU 忙等,浪费资源还不干实事,不适合作为一种通用的处理方法。
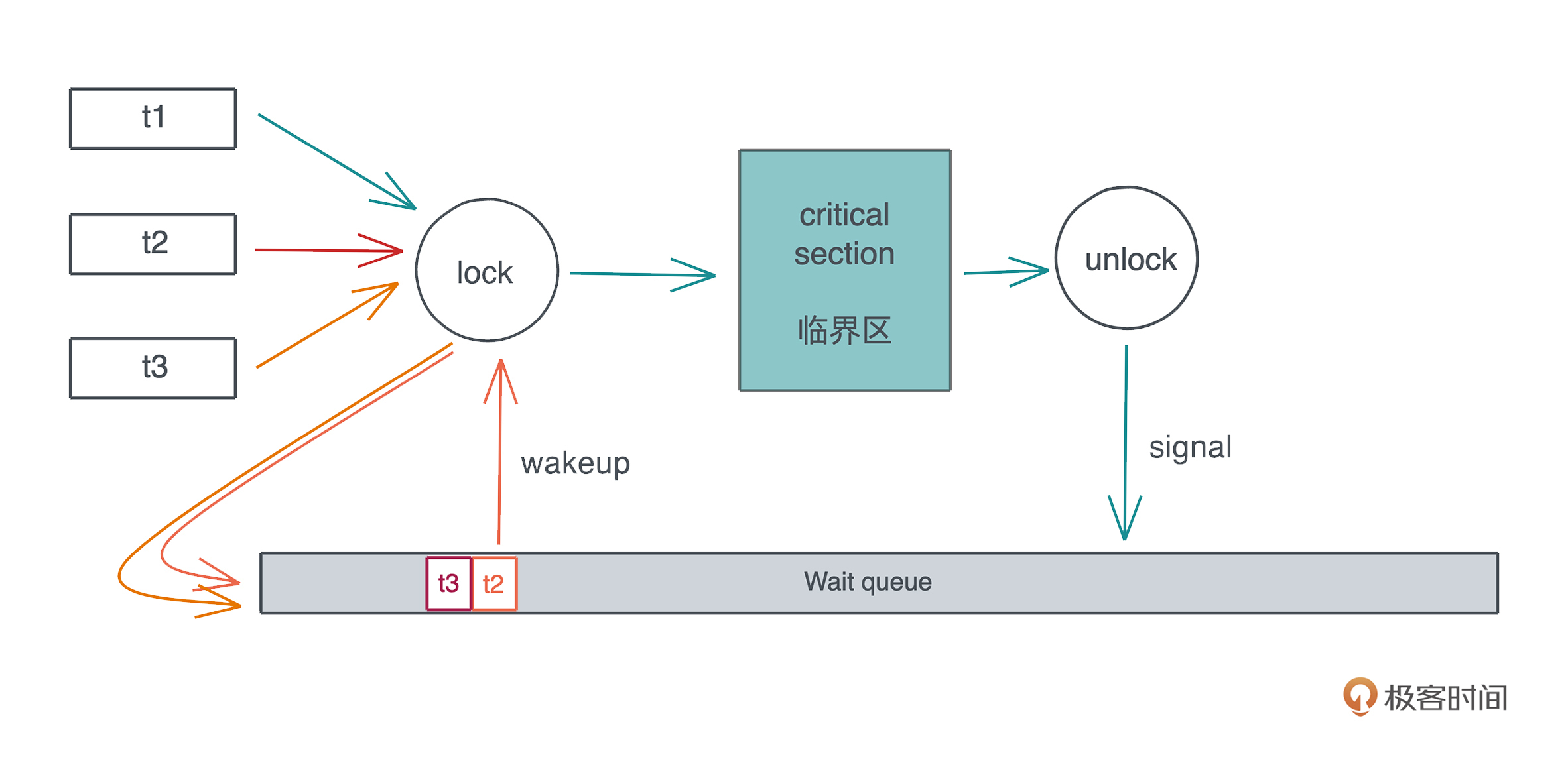
更通用的解决方案是:当多个线程竞争同一个 Mutex 时,获得锁的线程得到临界区的访问,其它线程被挂起,放入该 Mutex 上的一个等待队列里。当获得锁的线程完成工作,退出临界区时,Mutex 会给等待队列发一个信号,把队列中第一个线程唤醒,于是这个线程可以进行后续的访问。整个过程如下:
我们前面也讲过,线程的上下文切换代价很大,所以频繁将线程挂起再唤醒,会降低整个系统的效率。所以很多 Mutex 具体的实现会将 SpinLock(确切地说是 spin wait)和线程挂起结合使用:线程的 lock 请求如果拿不到会先尝试 spin 一会,然后再挂起添加到等待队列。Rust 下的 parking_lot 就是这样实现的。
当然,这样实现会带来公平性的问题:如果新来的线程恰巧在 spin 过程中拿到了锁,而当前等待队列中还有其它线程在等待锁,那么等待的线程只能继续等待下去,这不符合 FIFO,不适合那些需要严格按先来后到排队的使用场景。为此,parking_lot 提供了 fair mutex。
Mutex 的实现依赖于 CPU 提供的 atomic。你可以把 Mutex 想象成一个粒度更大的 atomic,只不过这个 atomic 无法由 CPU 保证,而是通过软件算法来实现。
至于操作系统里另一个重要的概念信号量(semaphore),你可以认为是 Mutex 更通用的表现形式。比如在新冠疫情下,图书馆要控制同时在馆内的人数,如果满了,其他人就必须排队,出来一个才能再进一个。这里,如果总人数限制为 1,就是 Mutex,如果 > 1,就是 semaphore。
小结
今天我们学习了两个基本的并发原语 Atomic 和 Mutex。Atomic 是一切并发同步的基础,通过CPU 提供特殊的 CAS 指令,操作系统和应用软件可以构建更加高层的并发原语,比如 SpinLock 和 Mutex。
SpinLock和 Mutex 最大的不同是,使用 SpinLock,线程在忙等(busy wait),而使用 Mutex lock,线程在等待锁的时候会被调度出去,等锁可用时再被调度回来。
听上去 SpinLock 似乎效率很低,其实不是,这要具体看锁的临界区大小。如果临界区要执行的代码很少,那么和 Mutex lock 带来的上下文切换(context switch)相比,SpinLock 是值得的。在 Linux Kernel 中,很多时候我们只能使用 SpinLock。
思考题
你可以想想可以怎么实现 semaphore,也可以想想像图书馆里那样的人数控制系统怎么用信号量实现(提示:Rust 下 tokio 提供了 tokio::sync::Semaphore)。
欢迎在留言区分享你的思考,感谢你的阅读。下一讲我们继续学习并发的另外三个概念Condvar、Channel 和 Actor model,下一讲见~
参考资料
- Robe Pike的演讲 concurrency is not parallelism,如果你没有看过,建议去看看。
- 通过今天的例子,相信你对 atomic 以及其背后的 CAS 有个初步的了解,如果你还想更深入学习 Rust 下如何使用 atomic,可以看 Jon Gjengset 的视频:Crust of Rust: Atomics and Memory Ordering。
- Rust 的 spin-rs crate 提供了 Spinlock 的实现,感兴趣的可以看看它的实现。