23 KiB
22|RUM猜想:想要读写快还是存储省?又是三选二
你好,我是王磊。
从第18讲,我们开始介绍查询过程中全部重要节点的相关技术,从并行框架到查询执行引擎,再从关联运算符到行式和列式存储。今天这一讲我们面临最后的一个步骤,直接和磁盘打交道,实现最终的数据存储,这就是存储引擎。
RUM猜想
说到数据存储,我相信很多人都有一种直觉,那就是读写两种操作的优化在很多时候是互斥的。
我们可以想一下,数据以什么形式存储,可以实现最快的写入速度?答案肯定是按照顺序写入,每次新增数据都追加在文件尾部,因为这样物理磁盘的磁头移动距离最小。
但这种方式对于读取显然是不友好的,因为没有任何有意义的数据结构做辅助,读操作必须从头到尾扫描文件。反过来,如果要实现更高效的读取,就要设计更复杂的数据结构,那么写入的速度当然就降低了,同时在存储空间上也会有额外的要求。
2016年的一篇论文将我们这种朴素的理解提升到理论层面,这就是RUM猜想。RUM猜想来自论文“Designing Access Methods: The RUM Conjecture”(Manos Athanassoulis et al.(2016)),同时被SIGMOD和EDBT收录。它说的是,对任何数据结构来说,在Read Overhead(读)、Update Overhead(写) 和 Memory or Storage Overhead(存储) 中,同时优化两项时,需要以另一项劣化作为代价。论文用一幅图展示了常见数据结构在这三个优化方向中的位置,这里我摘录下来便于你理解。
")
在这张图中,我们可以看到两个非常熟悉的数据结构B-Tree和LSM,它们被用于分布式数据库的存储引擎中,前者(实际是B+Tree,B-Tree的变体)主要用于PGXC,后者则主要用于NewSQL。这是不是代表PGXC就是要针对读操作,而NewSQL是针对写操作呢?并没有这么简单,还是要具体分析数据结构的使用过程。
下面,我们先从B+Tree说起,它也是单体数据库广泛使用的数据结构。
存储结构
B+Tree
B+Tree是对读操作优化的存储结构,能够支持高效的范围扫描,叶节点之间保留链接并且按主键有序排列,扫描时避免了耗时的遍历树操作。
我们用一个例子来演示下MySQL数据库的B+Tree写操作过程。
下面这张图中展示了一棵高度为2的B+Tree,数据存储在5个页表中,每页可存放4条记录。为了方便你理解,我略去了叶子节点指向数据的指针以及叶子节点之间的顺序指针。
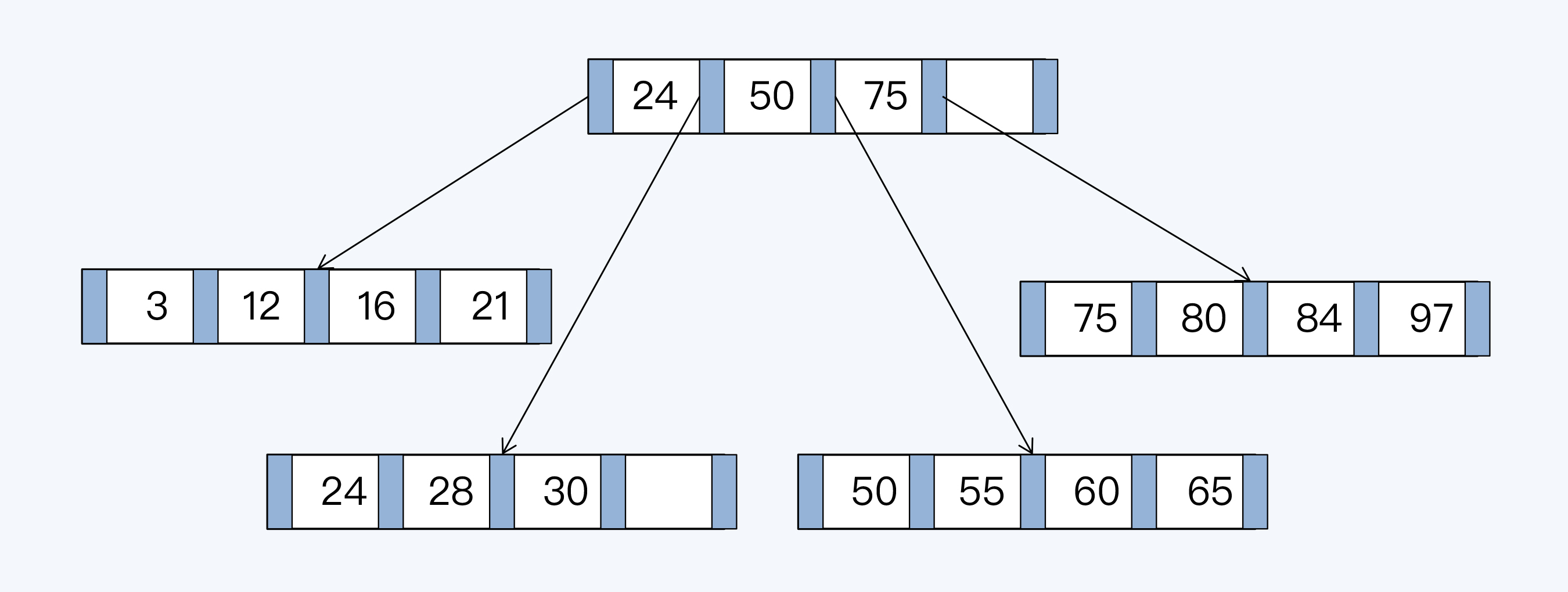
B+Tree由内节点(InterNode)和叶节点(LeafNode)两类节点构成,前者仅包含索引信息,后者则携带了指向数据的指针。当插入一个索引值为70的记录,由于对应页表的记录已满,需要对B+Tree重新排列,变更其父节点所在页表的记录,并调整相邻页表的记录。完成重新分布后的效果如下:
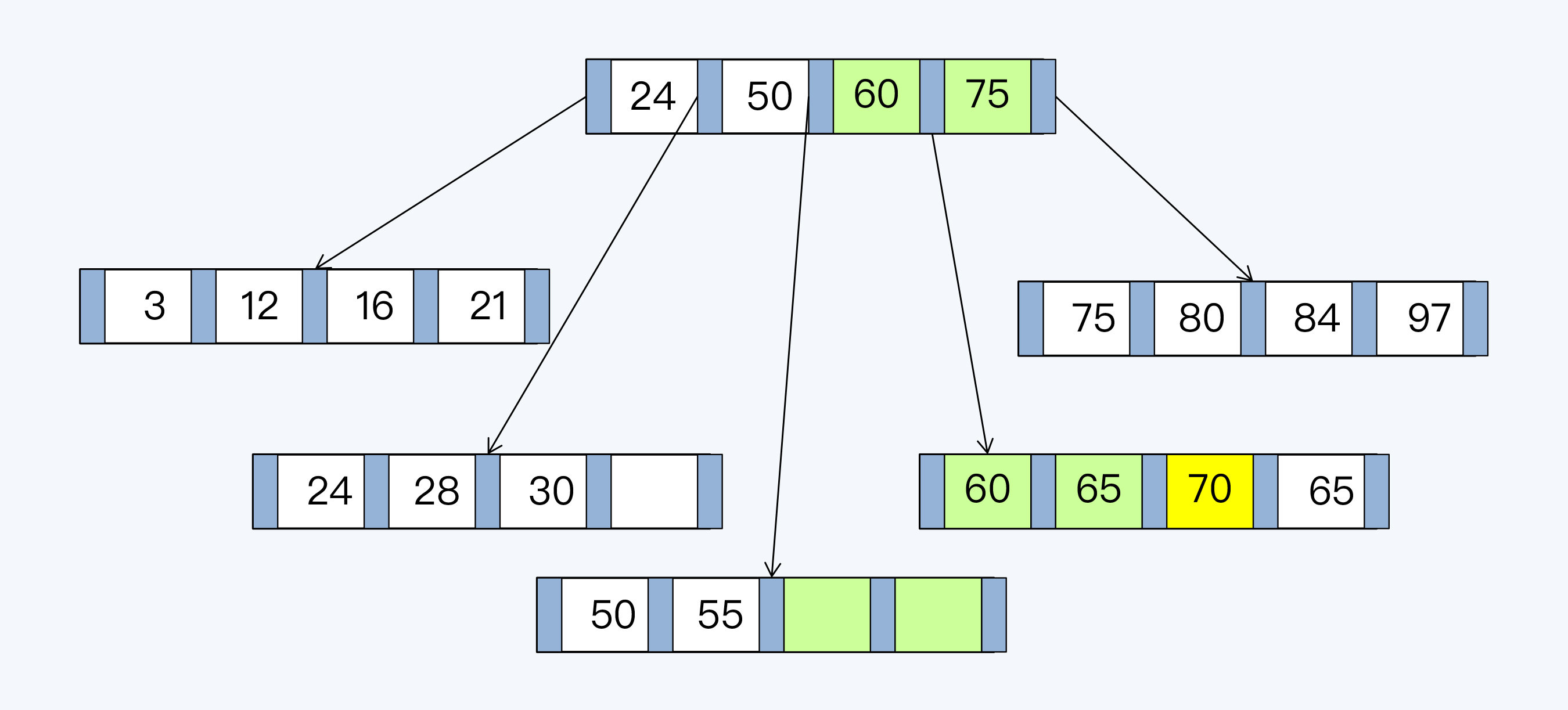
在这个写入过程中存在两个问题:
- 写放大
本来我们仅需要一条写入记录(黄色标注),实际上更新了3个页表中的7条索引记录,额外的6条记录(绿色标注)是为了维护B+Tree结构产生的写放大。
为了度量写放大的程度,相关研究中引入了写放大系数(Write Amplification Factor,WAF)这个指标,就是指实际写入磁盘的数据量和应用程序要求写入数据量之比。对于空间放大有类似的度量单位,也就是空间放大系数(Space Amplification Factor, SAF)。
我们这个例子中的WAF是7。
- 存储不连续
虽然新增叶节点会加入到原有叶节点构成的有序链表中,整体在逻辑上是连续的,但是在磁盘存储上,新增页表申请的存储空间与原有页表很可能是不相邻的。这样,在后续包含新增叶节点的查询中,将会出现多段连续读取,磁盘寻址的时间将会增加。
也就是说,虽然B+Tree结构是为读取做了优化,但如果进行大量随机写还是会造成存储的碎片化,从而导致写放大和读放大。
填充因子
填充因子(Factor Fill)是一种常见的优化方法,它的原理就是在页表中预留一些空间,这样不会因为少量的数据写入造成树结构的大幅变动。但填充因子的设置也很难拿捏,过大则无法解决写放大问题;过小会造成页表数量膨胀,增大对磁盘的扫描范围,降低查询性能。
相对于PGXC,NewSQL风格分布式数据库的底层存储引擎则主要采用LSM-Tree。
LSM-Tree
LSM-Tree(Log Structured-Merge Tree)由Patrick O’Neil在1996年的同名论文中首先提出。而后Google在Bigtable(Fay Chang et al.(2008))中使用了这个模型,它的大致处理过程如下图所示:
")
系统接收到写操作后会记录日志(Tablet Log)并将数据写入内存(Memtable),这时写操作就可以返回成功了。而在系统接收到读操作时,会在内存和磁盘文件中查找对应的数据。
你肯定会说不对呀,如果写入的数据都在内存中,磁盘文件又是哪来的呢?
的确,这中间还少了重要的一步,就是数据落盘的过程,这也是LSM-Tree最有特点的设计。其实,LSM是分成三步完成了数据的落盘。
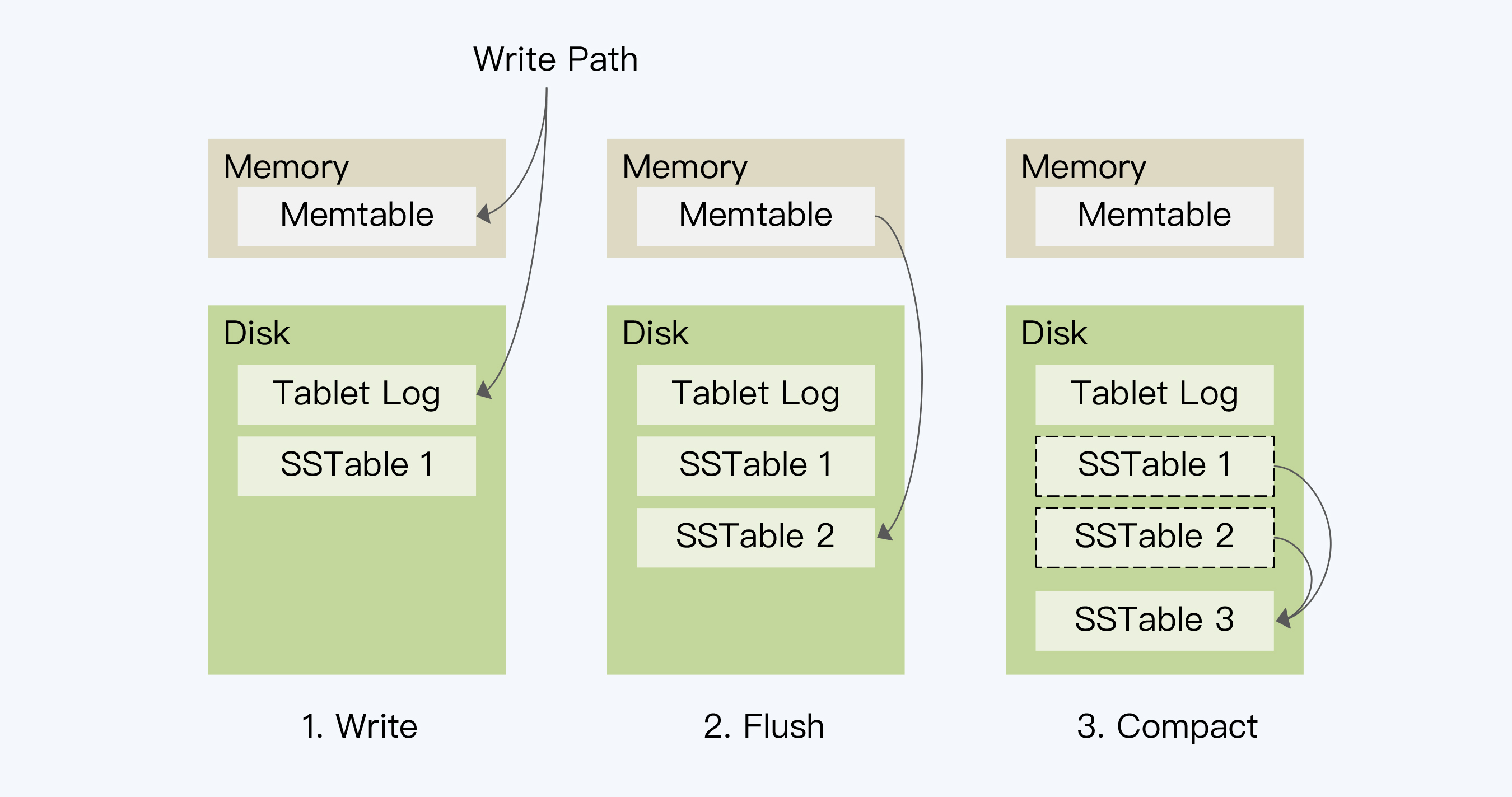
- 第一步已经说过了,就是写入Memtable,同时记录Tablet Log;
- 当Memtable的数据达到一定阈值后,系统会把其冻结并将其中的数据顺序写入磁盘上的有序文件(Sorted String Table,SSTable)中,这个操作被称为Flush;当然,执行这个动作的同时,系统会同步创建一个新的Memtable,处理写入请求。
- 根据第二步的处理逻辑,Memtable会周期性地产生SSTable。当满足一定的规则时,这些SSTable会被合并为一个大的SSTable。这个操作称为Compact。
与B+Tree的最大不同是LSM将随机写转换为顺序写,这样提升了写入性能。另外,Flush操作不会像B+Tree那样产生写放大。
我猜你会说,不对呀,Flush是没有写放大,但还有Compact呢?
说的没错,真正的写放大就发生在Compact这个动作上。Compact有两个关键点,一是选择什么时候执行,二是要将哪些SSTable合并成一个SSTable。这两点加起来称为“合并策略”。
我们刚刚在例子中描述的就是一种合并策略,称为Size-Tiered Compact Strategy,简称Tiered。BigTable和HBase都采用了Tiered策略。它的基本原理是,每当某个尺寸的SSTable数量达到既定个数时,将所有SSTable合并成一个大的SSTable。这种策略的优点是比较直观,实现简单,但是缺点也很突出。下面我们从RUM的三个角度来分析下:
- 读放大
执行读操作时,由于单个SSTable内部是按照Key顺序排列的,那么查找方法的时间复杂度就是O(logN)。因为SSTable文件是按照时间间隔产生的,在Key的范围上就会存在交叉,所以每次读操作都要遍历所有SSTable。如果有M个SSTable,整体时间复杂度就是O(M_logN)。执行Compact后,时间复杂度降低为O(log(M_N))。在只有一个SSTable时,读操作没有放大。
- 写放大
Compact会降低读放大,但却带来更多的写放大和空间放大。其实LSM只是推迟了写放大,短时间内,可以承载大量并发写入,但如果是持续写入,则需要一部分I/O开销用于处理Compact。
你可能听说到过关于B+Tree和LSM的一个争论,就是到底谁的写放大更严重。如果是采用Tiered策略,LSM的写放大比B+Tree还严重。此外,Compact是一个很重的操作,占用大量的磁盘I/O,会影响同时进行的读操作。
- 空间放大
从空间放大的角度看,Tiered策略需要有两倍于数据大小的空间,分别存储合并前的多个SSTable和合并后的一个SSTable,所以SAF是2,而B+Tree的SAF是1.33。
看到这你可能会觉得奇怪,LSM好像也不是太优秀呀。只有短时间内写入速度快和阶段性的控制读放大这两个优势,在写放大和空间放大上都做得不好,而且还有Compact这种耗费I/O的重量级操作。那LSM为什么还这么流行呢?
这是因为LSM还有另一种合并策略,Leveled Compact Strategy,简称Leveled策略。
Leveled Compact Strategy
Tiered策略之所以有严重的写放大和空间放大问题,主要是因为每次Compact需要全量数据参与,开销自然就很大。那么如果每次只处理小部分SSTable文件,就可以改善这个问题了。
Leveled就是这个思路,它的设计核心就是将数据分成一系列Key互不重叠且固定大小的SSTable文件,并分层(Level)管理。同时,系统记录每个SSTable文件存储的Key的范围。Leveled策略最先在LevelDB中使用,也因此得名。后来从LevelDB上发展起来的RocksDB也采用这个策略。
接下来,我们详细说明一下这个处理过程。
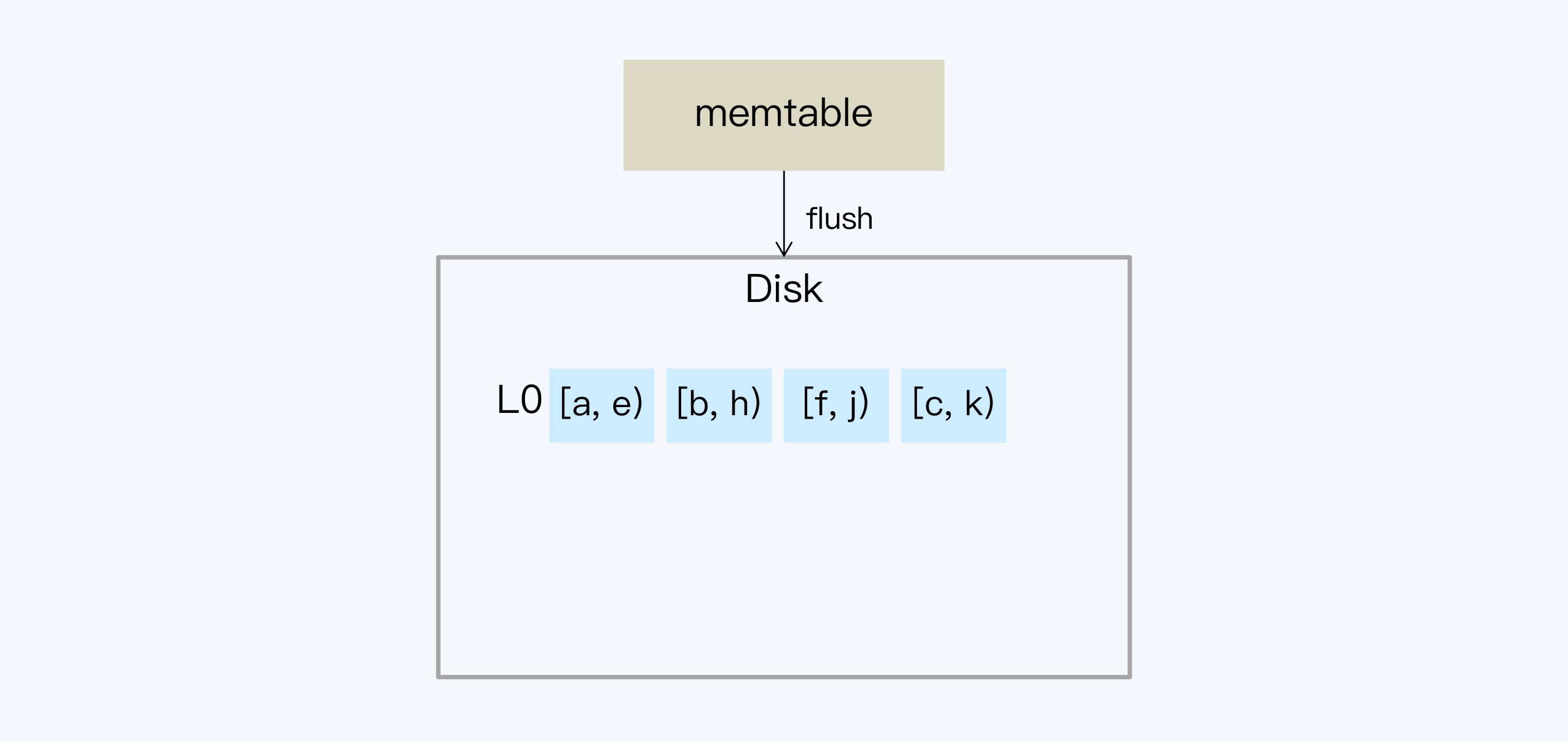
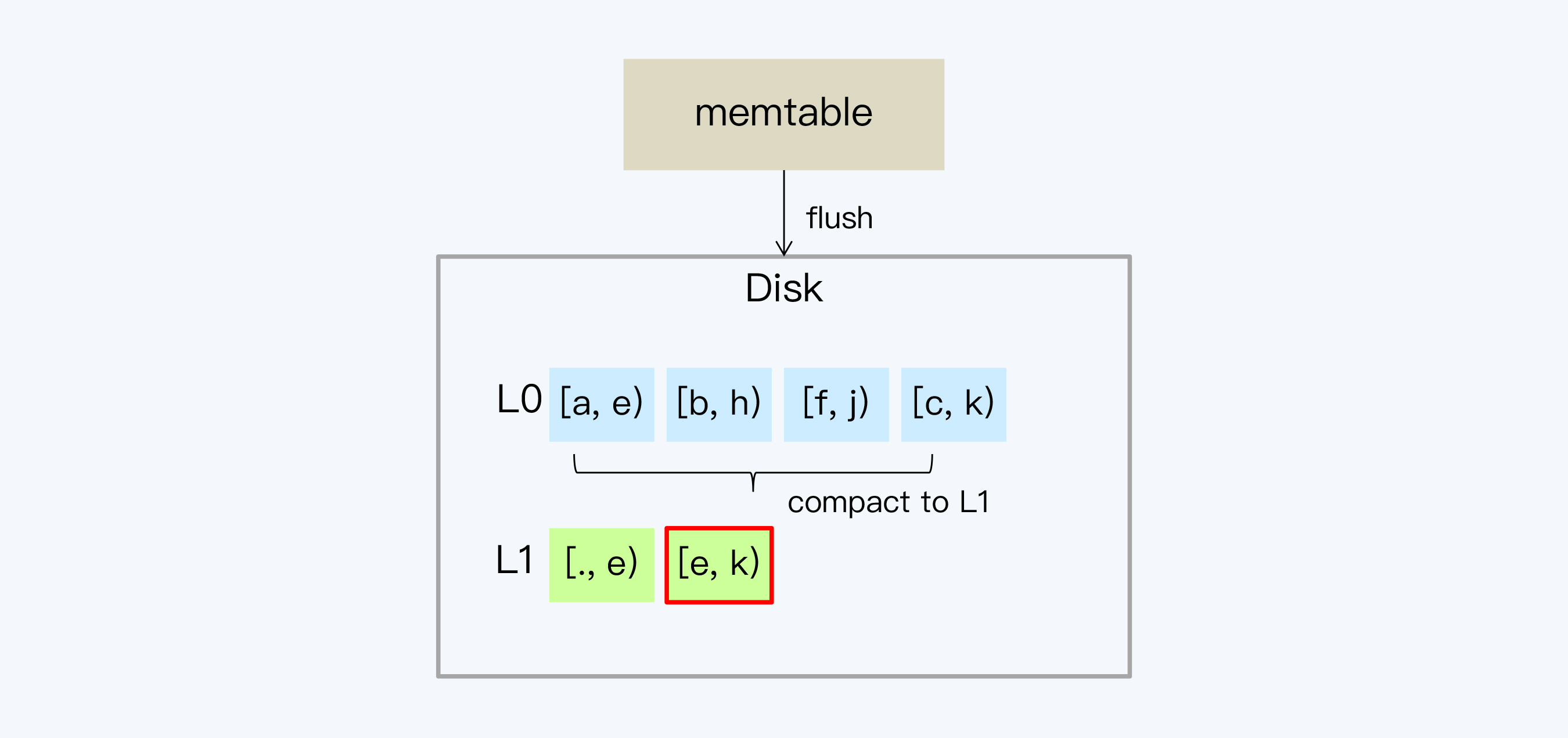
- 第一步处理Leveled和Tiered是一样的。当内存的数据较多时,就会Flush到SSTable文件。对应内存的这一层SSTable定义为L0,其他层的文件我们同样采用Ln的形式表示,n为对应的层数。因为L0的文件仍然是按照时间顺序生成的,所以文件之间就可能有重叠的Key。L0不做整理的原因是为了保证写盘速度。
- 通常系统会通过指定SSTable数量和大小的方式控制每一个层的数据总量。当L0超过预定文件数量,就会触发L0向L1的Compact。因为在L0的SSTable中Key是交叉的,所以要读取L0的所有SSTable,写入L1,完成后再删除L0文件。从L1开始,SSTable都是保证Key不重叠的。
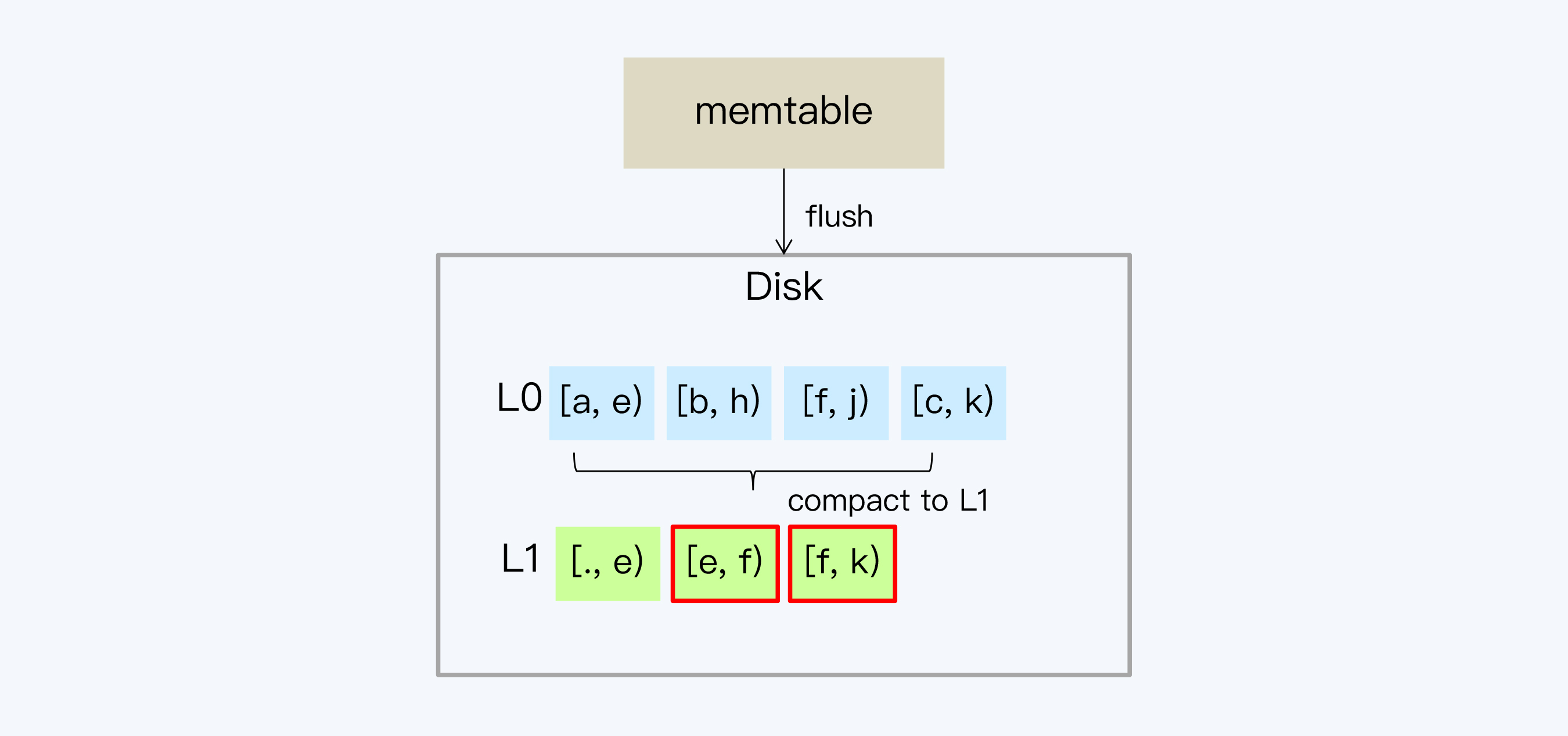
- 随着L1层数据量的增多,SSTable可能会重新划分边界,目的是保证数据相对均衡的存储。
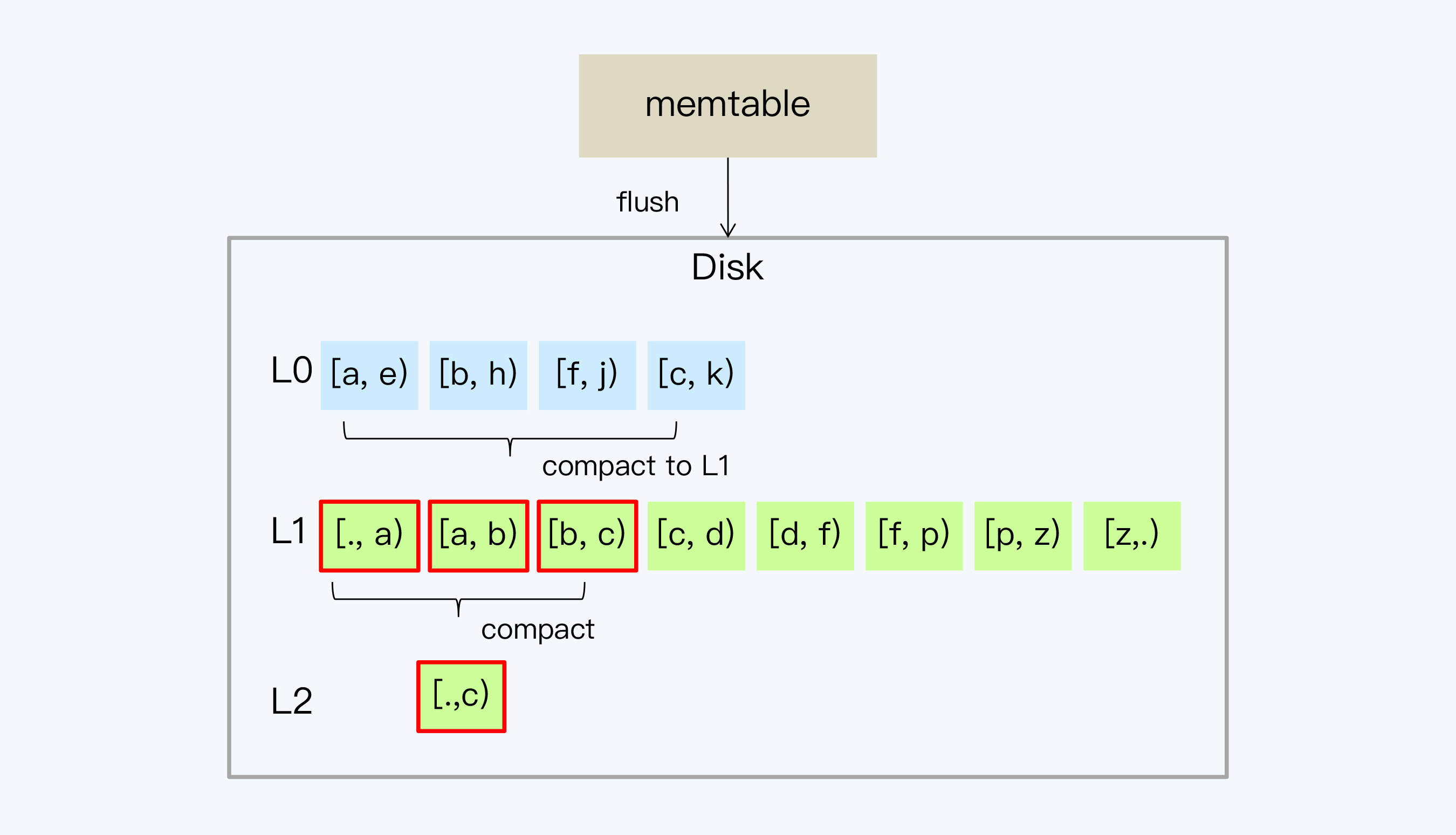
- 由于L1的文件大小和数量也是受限的,所以随着数据量的增加又会触发L1向L2的Compact。因为L1的文件是不重叠的,所以不用所有L1的文件都参与Compact,这就延缓了磁盘I/O的开销。而L2的单个文件容量会更大,通常从L1开始每层的存储数据量以10倍的速度增长。这样,每次Ln到L(n+1)的compact只会涉及少数的SSTable,间隔的时间也会越来越长。
说完处理流程,我们再从RUM三个角度来分析下。
- 读放大
因为存在多个SSTable,Leveled策略显然是存在读放大的。因为SSTable是有序的,如果有M个文件,则整体计算的时间复杂度是O(MlogN)。这个地方还可以优化。通常的方法是在SSTable中引入Bloom Filter(BF),这是一个基于概率的数据结构,可以快速地确定一个Key是否存在。这样执行Get操作时,先读取每一个SSTable的BF,只有这个Key存在才会真的去文件中查找。
那么对于多数SSTable,时间复杂度是O(1)。L0层的SSTable无序,所有都需要遍历,而从L1层开始,每层仅需要查找一个SSTable。那么优化后的整体时间复杂度就是O(X+L-1+logN),其中X是L0的SSTable数量,L是层数。
- 写放大
Leveled策略对写放大是有明显改善的,除了L0以外,每次更新仅涉及少量SSTable。但是L0的Compact比较频繁,所以仍然是读写操作的瓶颈。
- 空间放大
数据在同层的SSTable不重叠,这就保证了同层不会存在重复记录。而由于每层存储的数据量是按照比例递增的,所以大部分数据会存储在底层。因此,大部分数据是没有重复记录的,所以数据的空间放大也得到了有效控制。
分布式数据库的实现
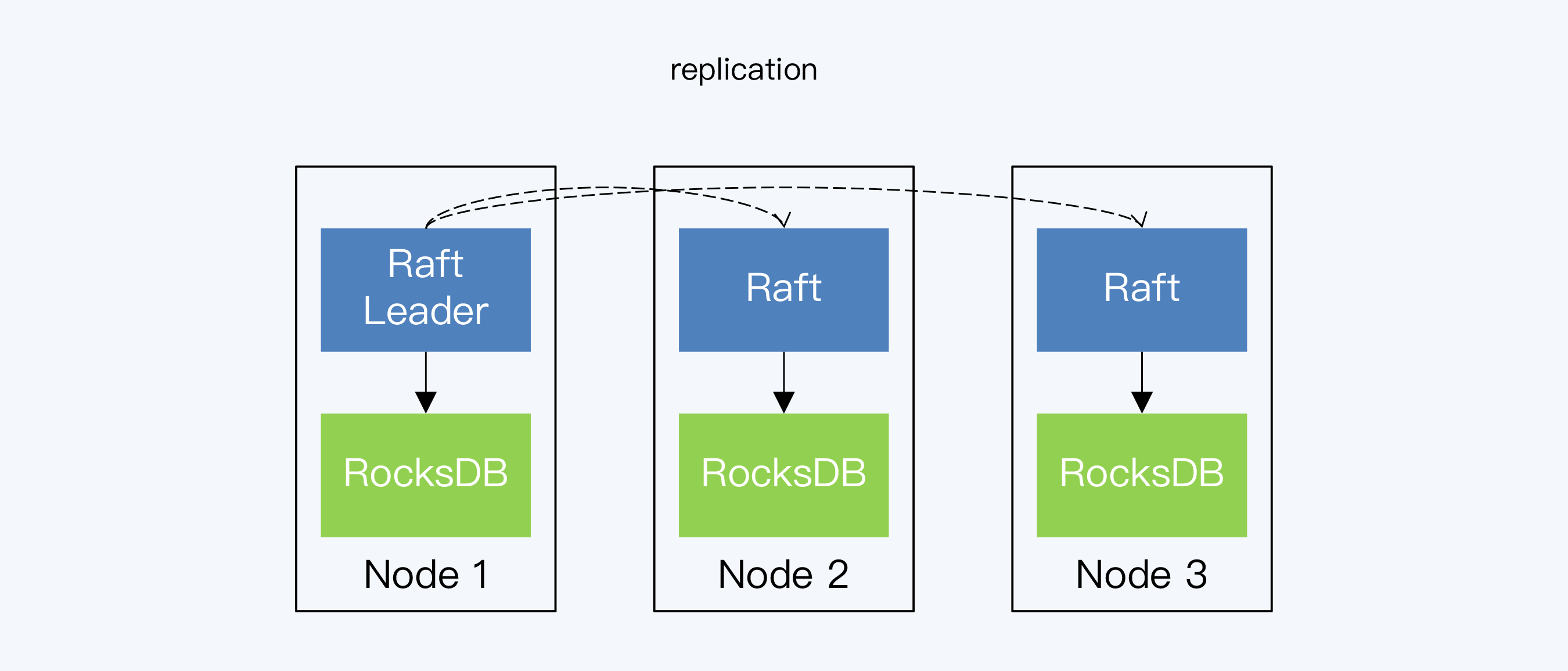
到这里我们已经介绍了存储结构的实现原理和它们在单体数据库中的运转过程。在分布式数据库中,数据存储是在每个数据节点上各自进行的,所以原理和过程是完全一样的。因此,TiDB和CockroachDB干脆直接使用RocksDB作为单机存储引擎。在这两个分布式数据库的架构中,RocksDB都位于Raft协议之下,承担具体的数据落地工作。
他们为什么选择RocksDB呢?CockroachDB的官方解释是,他们的选择完全不是因为要考虑LSM的写优化能力,而是因为RocksDB作为一个成熟的单机存储引擎,可以加速CockroachDB的开发过程,而RocksDB本身也非常优秀,是他们能找到的最好选择。另一方面,TiDB虽然没有提到选择一个写优化的存储引擎是否有特殊意义,但同样也认为RocksDB 是一个非常优秀开源项目,可以满足他们对单机引擎的各种要求。
不过,很有意思的地方是,经过了早期版本的演进,TiDB和CockroachDB不约而同都推出了自己的单机存储引擎。
你猜是什么原因呢?我在稍后再给出答案。现在让我们先看看另一款NewSQL风格分布式数据库OceanBase的实现。
OceanBase
OceanBase选择了自研方式,也就没有直接引用RocksDB,但它的存储模型基本上也是LSM,也就同样需要面对Compact带来的一系列问题。我们来看看OceanBase是怎么优化的。
宏块与微块
在Compact过程中,被合并文件中的所有数据都要重写到新文件中。其实,对于那些没有任何修改的数据,这个过程是可以被优化的。
OceanBase引入了宏块与微块的概念,微块是数据的组织单元,宏块则由微块组成。这样在进行Compact操作时,可以在宏块和微块两个级别判断,是否可以复用。如果在这两个级别数据没有发生实质变化,则直接进行块级别的拷贝,这样就省去了更细粒度的数据解析、编码以及计算校验和(Checksum)等操作。
轮转合并
OceanBase还在多副本基础上设计了轮转合并机制。我们知道,根据Raft协议或者Paxos协议,总有多个副本同时存储着最新的数据,那么我们就可以用多副本来解耦Compact操作和同时段的查询操作,避免磁盘I/O上的竞争。
它的大致设计思路是这样的,将Compact操作放在与Leader保持数据同步的Follower上执行,而Leader节点则保持对外提供查询服务。当Compact完成后,改由那个Follower对外提供查询服务,Leader和其他副本则去执行Compact。
OceanBase的这两项优化虽然没有降低写放大系数,但却有效减少了Compact过程中的I/O竞争。
TiDB:WiscKey
OceanBase的优化还停留在工程层面,那么还有没有更好的理论模型呢?
2016年真的出现了新的模型,这就是WiscKey。论文“WiscKey: Separating Keys from Values in SSD-conscious Storage”(Lanyue Lu et al.(2016))阐述了这种模型的设计思想。WiscKey 提出的改进是通过将 value 分离出LSM-Tree的方法来降低写放大。
WiscKey的主要设计思想是,在SSTable的重写过程中,核心工作是对Key进行整理,保证多个SSTable的Key范围不重叠,且内部有序。而这个过程中Value的重写是没有太大价值的,而从实践看,Value占用的存储空间远远大于Key。这意味着大量的写操作和空间成本被浪费了。所以WiscKey提出将Value从SSTable中分离出来单独存储,这样就降低了写放大系数。
")
Value单独存储的问题是按照Key连续读取数据时,对应的Value并不是连续存储,磁盘寻址成本增大。而WiscKey的设计前提是使用SSD替换HDD,SSD的随机读写效率接近于顺序读写,所以能够保持较高的整体效率。事实上,过高的写放大也会严重缩短SSD的使用寿命。WiscKey就是针对SSD提出的存储模型。
说完WiscKey,你或许猜到了TiDB和Cockroach放弃RocksDB的原因。
没错,TiDB的新存储引擎TiTan就是受到WiscKey的启发,它目标之一就是将 Value 从 LSM-Tree 中分离出来单独存储,以降低写放大。
CockroachDB:Pebble
我们再来看看,CockroachDB的单机存储引擎Pebble。这里可能会让你有点意外,Pebble并不是由于WiscKey的模型改进,它的出现完全是工程因素。首先是Go与C之间的调用障碍(CGo barrier)。
CGo barrier
CockroachDB采用Go作为编程语言,而RocksDB是由C++编写的。所以CockroachDB要面临Go到C的之间的调用障碍。测试表明,每一次对RocksDB的调用都要额外付出70纳秒的延迟。这个数字虽然看上去并不大,但是由于K/V操作非常频繁,总体成本仍然很可观。CockroachDB也通过一些设计来降低延迟,比如将多次K/V操作合并成一次对RocksDB的操作,但是这一方面带来设计的复杂性,另外也无法从根本上解决问题。
值得一提的是,TiDB也使用了Go语言作为主力开发语言,同样面临了这个问题。TiDB最终是在底层存储TiVK放弃Go而选择Rust的,部分原因就是Rust与C++之间的调用成本要低得多。
代码膨胀
CockroachDB替换存储引擎的另一个原因是,RocksDB的代码量日益膨胀。早期RocksDB的代码行数仅是30k,而今天已经增加到350k+。这很大程度是由于RocksDB的成功,很多软件选择了RocksDB作为存储引擎,包括MySQL(MyRocks)、Flink等,这驱动RocksDB增加了更丰富的特性,也导致体量越来越大。但这些丰富的特性对CockroachDB来说并不是必须的,反而引入了不必要的变更风险。而Cockraoch开发的Pebble,代码行数则仅有45k,的确是小巧得多了。
所以,总的来说,CockraochDB替换存储引擎是工程原因,而其中CGO barrier的这个问题更像是在偿还技术债。
TiFlash
到这里,分布式数据库下典型的存储引擎就介绍完了,它们都适用于OLTP场景,要求在小数据量下具有高效的读写能力。而OLAP下的存储引擎则有很大的不同,通常不会对单笔写入有太高的要求,但也有例外,还记得我在第18讲提到过的OLAP存储引擎TiFlash吗?由于实时分析的要求,它必须及时落盘来自TiKV的数据,同样需要很高的写入速度。
在18讲中并没对TiFlash展开说明,我想,现在你应该能够猜出TiFlash的关键设计了吧。是的,高效写入的秘密就在于它的存储模型Delta Tree采用了类似LSM的结构。其中的Delta Layer 和 Stable Layer,分别对应 LSM Tree 的 L0 和 L1,Delta Layer可以顺序写入。
小结
那么,今天的课程就到这里了,让我们梳理一下这一讲的要点。
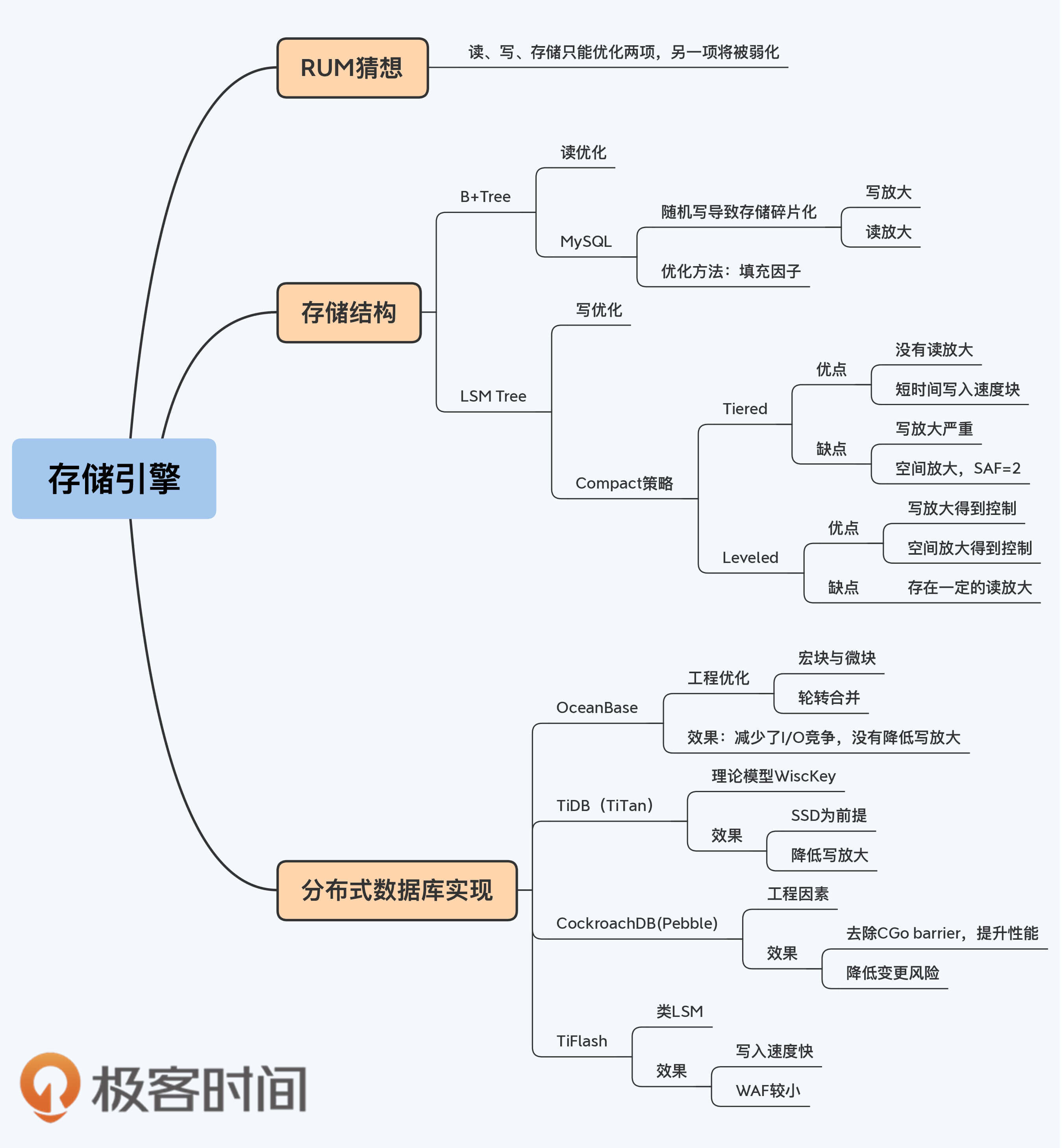
- RUM猜想提出读负载、写负载、空间负载这三者之间只能优化两个目标,另外一个目标只能被弱化。在典型数据结构中,B+Tree是读取优化,LSM是写入优化,这两种存储结构正好对应了两种风格分布式数据库的存储引擎。
- PGXC和单体数据库采用了B+Tree,随机写会带来页表分裂和存储不连续,导致写放大和读放大。常用的优化方式是通过填充因子预留页空间。LSM将随机写转换为顺序写提升了写入速度,但只是延缓了写放大并没有真正减少写放大。如果采用Tiered策略,LSM的写放大和空间放大都高于B+Tree。不过,LSM可以很好地控制读放大,读操作的时间复杂度是O(logN)。
- Level策略,降低了写放大和空间放大,同时读操作的成本也没有大幅增加,是一个比较广泛使用的存储模型。RocksDB采用了这种存储模型,加上优秀的工程实现,被很多软件引用。TiDB和CockroachDB也使用RocksDB作为单机存储引擎。OceanBase在工程层面对LSM进行了优化。
- WiscKey是对LSM的理论模型优化,通过Key/Value分离存储的方式降低写放大,但这种设计会增加随机读写,要以使用SSD为前提。TiDB受到WiscKey的启发,自研了TiTan。
- CockroachDB也推出了自己的存储引擎Pebble,主要目的是解决工程问题,包括解决CGo barrier问题和避免Rust功能膨胀带来的变更风险。
这一讲,我们简单介绍了近年来的主流存储模型,不难发现LSM占据了主导位置。但这并不代表B+Tree是一种失败的设计,两者只是在RUM之间选择了不同的优化方向。同时,是否有可靠的开源工程实现也直接影响到了对应存储模型的流行度,这一点和Raft协议的大规模使用很相似。
我的一点建议是,记下这些存储模型虽然重要,但更加关键的是对RUM猜想的深入思考,因为架构设计的精髓就在于做出适当的取舍。
思考题
课程的最后,我们来看看今天的思考题。今天的课程中,我们介绍了不同的存储模型,其中也提到了Bloom Filter的使用。它是一种神奇的数据结构,在RUM中是空间优化的典型,用很少的空间就可以记录很多数值是否存在。这种数据结构提供了两种操作方式,用于数值的写入和数值的检核,但数据库查询更多是范围查询,在K/V中体现为Scan操作,显然不能直接对应。所以我的问题是,Scan操作是否可以使用Bloom Filter来加速,如果可以又该如何设计呢?
欢迎你在评论区留言和我一起讨论,我会在答疑篇和你继续讨论这个问题。如果你身边的朋友也对存储引擎这个话题感兴趣,你也可以把今天这一讲分享给他,我们一起讨论。
学习资料
Fay Chang et al.: Bigtable: A Distributed Storage System for Structured Data
Lanyue Lu et al.: WiscKey: Separating Keys from Values in SSD-conscious Storage
Manos Athanassoulis et al: Designing Access Methods: The RUM Conjecture
Patrick O’Neil et al.: The Log-Structured Merge-Tree (LSM-Tree)