23 KiB
50 | 计算虚拟化之CPU(上):如何复用集团的人力资源?
上一节,我们讲了一下虚拟化的基本原理,以及qemu、kvm之间的关系。这一节,我们就来看一下,用户态的qemu和内核态的kvm如何一起协作,来创建虚拟机,实现CPU和内存虚拟化。
这里是上一节我们讲的qemu启动时候的命令。
qemu-system-x86_64 -enable-kvm -name ubuntutest -m 2048 -hda ubuntutest.qcow2 -vnc :19 -net nic,model=virtio -nettap,ifname=tap0,script=no,downscript=no
接下来,我们在这里下载qemu的代码。qemu的main函数在vl.c下面。这是一个非常非常长的函数,我们来慢慢地解析它。
1.初始化所有的Module
第一步,初始化所有的Module,调用下面的函数。
module_call_init(MODULE_INIT_QOM);
上一节我们讲过,qemu作为中间人其实挺累的,对上面的虚拟机需要模拟各种各样的外部设备。当虚拟机真的要使用物理资源的时候,对下面的物理机上的资源要进行请求,所以它的工作模式有点儿类似操作系统对接驱动。驱动要符合一定的格式,才能算操作系统的一个模块。同理,qemu为了模拟各种各样的设备,也需要管理各种各样的模块,这些模块也需要符合一定的格式。
定义一个qemu模块会调用type_init。例如,kvm的模块要在accel/kvm/kvm-all.c文件里面实现。在这个文件里面,有一行下面的代码:
type_init(kvm_type_init);
#define type_init(function) module_init(function, MODULE_INIT_QOM)
#define module_init(function, type) \
static void __attribute__((constructor)) do_qemu_init_ ## function(void) \
{ \
register_module_init(function, type); \
}
void register_module_init(void (*fn)(void), module_init_type type)
{
ModuleEntry *e;
ModuleTypeList *l;
e = g_malloc0(sizeof(*e));
e->init = fn;
e->type = type;
l = find_type(type);
QTAILQ_INSERT_TAIL(l, e, node);
}
从代码里面的定义我们可以看出来,type_init后面的参数是一个函数,调用type_init就相当于调用module_init,在这里函数就是kvm_type_init,类型就是MODULE_INIT_QOM。是不是感觉和驱动有点儿像?
module_init最终要调用register_module_init。属于MODULE_INIT_QOM这种类型的,有一个Module列表ModuleTypeList,列表里面是一项一项的ModuleEntry。KVM就是其中一项,并且会初始化每一项的init函数为参数表示的函数fn,也即KVM这个module的init函数就是kvm_type_init。
当然,MODULE_INIT_QOM这种类型会有很多很多的module,从后面的代码我们可以看到,所有调用type_init的地方都注册了一个MODULE_INIT_QOM类型的Module。
了解了Module的注册机制,我们继续回到main函数中module_call_init的调用。
void module_call_init(module_init_type type)
{
ModuleTypeList *l;
ModuleEntry *e;
l = find_type(type);
QTAILQ_FOREACH(e, l, node) {
e->init();
}
}
在module_call_init中,我们会找到MODULE_INIT_QOM这种类型对应的ModuleTypeList,找出列表中所有的ModuleEntry,然后调用每个ModuleEntry的init函数。这里需要注意的是,在module_call_init调用的这一步,所有Module的init函数都已经被调用过了。
后面我们会看到很多的Module,当你看到它们的时候,你需要意识到,它的init函数在这里也被调用过了。这里我们还是以对于kvm这个module为例子,看看它的init函数都做了哪些事情。你会发现,其实它调用的是kvm_type_init。
static void kvm_type_init(void)
{
type_register_static(&kvm_accel_type);
}
TypeImpl *type_register_static(const TypeInfo *info)
{
return type_register(info);
}
TypeImpl *type_register(const TypeInfo *info)
{
assert(info->parent);
return type_register_internal(info);
}
static TypeImpl *type_register_internal(const TypeInfo *info)
{
TypeImpl *ti;
ti = type_new(info);
type_table_add(ti);
return ti;
}
static TypeImpl *type_new(const TypeInfo *info)
{
TypeImpl *ti = g_malloc0(sizeof(*ti));
int i;
if (type_table_lookup(info->name) != NULL) {
}
ti->name = g_strdup(info->name);
ti->parent = g_strdup(info->parent);
ti->class_size = info->class_size;
ti->instance_size = info->instance_size;
ti->class_init = info->class_init;
ti->class_base_init = info->class_base_init;
ti->class_data = info->class_data;
ti->instance_init = info->instance_init;
ti->instance_post_init = info->instance_post_init;
ti->instance_finalize = info->instance_finalize;
ti->abstract = info->abstract;
for (i = 0; info->interfaces && info->interfaces[i].type; i++) {
ti->interfaces[i].typename = g_strdup(info->interfaces[i].type);
}
ti->num_interfaces = i;
return ti;
}
static void type_table_add(TypeImpl *ti)
{
assert(!enumerating_types);
g_hash_table_insert(type_table_get(), (void *)ti->name, ti);
}
static GHashTable *type_table_get(void)
{
static GHashTable *type_table;
if (type_table == NULL) {
type_table = g_hash_table_new(g_str_hash, g_str_equal);
}
return type_table;
}
static const TypeInfo kvm_accel_type = {
.name = TYPE_KVM_ACCEL,
.parent = TYPE_ACCEL,
.class_init = kvm_accel_class_init,
.instance_size = sizeof(KVMState),
};
每一个Module既然要模拟某种设备,那应该定义一种类型TypeImpl来表示这些设备,这其实是一种面向对象编程的思路,只不过这里用的是纯C语言的实现,所以需要变相实现一下类和对象。
kvm_type_init会注册kvm_accel_type,定义上面的代码,我们可以认为这样动态定义了一个类。这个类的名字是TYPE_KVM_ACCEL,这个类有父类TYPE_ACCEL,这个类的初始化应该调用函数kvm_accel_class_init(看,这里已经直接叫类class了)。如果用这个类声明一个对象,对象的大小应该是instance_size。是不是有点儿Java语言反射的意思,根据一些名称的定义,一个类就定义好了。
这里的调用链为:kvm_type_init->type_register_static->type_register->type_register_internal。
在type_register_internal中,我们会根据kvm_accel_type这个TypeInfo,创建一个TypeImpl来表示这个新注册的类,也就是说,TypeImpl才是我们想要声明的那个class。在qemu里面,有一个全局的哈希表type_table,用来存放所有定义的类。在type_new里面,我们先从全局表里面根据名字找这个类。如果找到,说明这个类曾经被注册过,就报错;如果没有找到,说明这是一个新的类,则将TypeInfo里面信息填到TypeImpl里面。type_table_add会将这个类注册到全局的表里面。到这里,我们注意,class_init还没有被调用,也即这个类现在还处于纸面的状态。
这点更加像Java的反射机制了。在Java里面,对于一个类,首先我们写代码的时候要写一个class xxx的定义,编译好就放在.class文件中,这也是出于纸面的状态。然后,Java会有一个Class对象,用于读取和表示这个纸面上的class xxx,可以生成真正的对象。
相同的过程在后面的代码中我们也可以看到,class_init会生成XXXClass,就相当于Java里面的Class对象,TypeImpl还会有一个instance_init函数,相当于构造函数,用于根据XXXClass生成Object,这就相当于Java反射里面最终创建的对象。和构造函数对应的还有instance_finalize,相当于析构函数。
这一套反射机制放在qom文件夹下面,全称QEMU Object Model,也即用C实现了一套面向对象的反射机制。
说完了初始化Module,我们还回到main函数接着分析。
2.解析qemu的命令行
第二步我们就要开始解析qemu的命令行了。qemu的命令行解析,就是下面这样一长串。还记得咱们自己写过一个解析命令行参数的程序吗?这里的opts是差不多的意思。
qemu_add_opts(&qemu_drive_opts);
qemu_add_opts(&qemu_chardev_opts);
qemu_add_opts(&qemu_device_opts);
qemu_add_opts(&qemu_netdev_opts);
qemu_add_opts(&qemu_nic_opts);
qemu_add_opts(&qemu_net_opts);
qemu_add_opts(&qemu_rtc_opts);
qemu_add_opts(&qemu_machine_opts);
qemu_add_opts(&qemu_accel_opts);
qemu_add_opts(&qemu_mem_opts);
qemu_add_opts(&qemu_smp_opts);
qemu_add_opts(&qemu_boot_opts);
qemu_add_opts(&qemu_name_opts);
qemu_add_opts(&qemu_numa_opts);
为什么有这么多的opts呢?这是因为,我们上一节给的参数都是简单的参数,实际运行中创建的kvm参数会复杂N倍。这里我们贴一个开源云平台软件OpenStack创建出来的KVM的参数,如下所示。不要被吓坏,你不需要全部看懂,只需要看懂一部分就行了。具体我来给你解析。
qemu-system-x86_64
-enable-kvm
-name instance-00000024
-machine pc-i440fx-trusty,accel=kvm,usb=off
-cpu SandyBridge,+erms,+smep,+fsgsbase,+pdpe1gb,+rdrand,+f16c,+osxsave,+dca,+pcid,+pdcm,+xtpr,+tm2,+est,+smx,+vmx,+ds_cpl,+monitor,+dtes64,+pbe,+tm,+ht,+ss,+acpi,+ds,+vme
-m 2048
-smp 1,sockets=1,cores=1,threads=1
......
-rtc base=utc,driftfix=slew
-drive file=/var/lib/nova/instances/1f8e6f7e-5a70-4780-89c1-464dc0e7f308/disk,if=none,id=drive-virtio-disk0,format=qcow2,cache=none
-device virtio-blk-pci,scsi=off,bus=pci.0,addr=0x4,drive=drive-virtio-disk0,id=virtio-disk0,bootindex=1
-netdev tap,fd=32,id=hostnet0,vhost=on,vhostfd=37
-device virtio-net-pci,netdev=hostnet0,id=net0,mac=fa:16:3e:d1:2d:99,bus=pci.0,addr=0x3
-chardev file,id=charserial0,path=/var/lib/nova/instances/1f8e6f7e-5a70-4780-89c1-464dc0e7f308/console.log
-vnc 0.0.0.0:12
-device cirrus-vga,id=video0,bus=pci.0,addr=0x2
-
-enable-kvm:表示启用硬件辅助虚拟化。
-
-name instance-00000024:表示虚拟机的名称。
-
-machine pc-i440fx-trusty,accel=kvm,usb=off:machine是什么呢?其实就是计算机体系结构。不知道什么是体系结构的话,可以订阅极客时间的另一个专栏《深入浅出计算机组成原理》。
qemu会模拟多种体系结构,常用的有普通PC机,也即x86的32位或者64位的体系结构、Mac电脑PowerPC的体系结构、Sun的体系结构、MIPS的体系结构,精简指令集。如果使用KVM hardware-assisted virtualization,也即BIOS中VD-T是打开的,则参数中accel=kvm。如果不使用hardware-assisted virtualization,用的是纯模拟,则有参数accel = tcg,-no-kvm。 -
-cpu SandyBridge,+erms,+smep,+fsgsbase,+pdpe1gb,+rdrand,+f16c,+osxsave,+dca,+pcid,+pdcm,+xtpr,+tm2,+est,+smx,+vmx,+ds_cpl,+monitor,+dtes64,+pbe,+tm,+ht,+ss,+acpi,+ds,+vme:表示设置CPU,SandyBridge是Intel处理器,后面的加号都是添加的CPU的参数,这些参数会显示在/proc/cpuinfo里面。
-
-m 2048:表示内存。
-
-smp 1,sockets=1,cores=1,threads=1:SMP我们解析过,叫对称多处理器,和NUMA对应。qemu仿真了一个具有1个vcpu,一个socket,一个core,一个threads的处理器。
socket、core、threads是什么概念呢?socket就是主板上插cpu的槽的数目,也即常说的“路”,core就是我们平时说的“核”,即双核、4核等。thread就是每个core的硬件线程数,即超线程。举个具体的例子,某个服务器是:2路4核超线程(一般默认为2个线程),通过cat /proc/cpuinfo,我们看到的是2_4_2=16个processor,很多人也习惯成为16核了。 -
-rtc base=utc,driftfix=slew:表示系统时间由参数-rtc指定。
-
-device cirrus-vga,id=video0,bus=pci.0,addr=0x2:表示显示器用参数-vga设置,默认为cirrus,它模拟了CL-GD5446PCI VGA card。
-
有关网卡,使用-net参数和-device。
-
从HOST角度:-netdev tap,fd=32,id=hostnet0,vhost=on,vhostfd=37。
-
从GUEST角度:-device virtio-net-pci,netdev=hostnet0,id=net0,mac=fa:16:3e:d1:2d:99,bus=pci.0,addr=0x3。
-
有关硬盘,使用-hda -hdb,或者使用-drive和-device。
-
从HOST角度:-drive file=/var/lib/nova/instances/1f8e6f7e-5a70-4780-89c1-464dc0e7f308/disk,if=none,id=drive-virtio-disk0,format=qcow2,cache=none
-
从GUEST角度:-device virtio-blk-pci,scsi=off,bus=pci.0,addr=0x4,drive=drive-virtio-disk0,id=virtio-disk0,bootindex=1
-
-vnc 0.0.0.0:12:设置VNC。
在main函数中,接下来的for循环和大量的switch case语句,就是对于这些参数的解析,我们不一一解析,后面真的用到这些参数的时候,我们再仔细看。
3.初始化machine
回到main函数,接下来是初始化machine。
machine_class = select_machine();
current_machine = MACHINE(object_new(object_class_get_name(
OBJECT_CLASS(machine_class))));
这里面的machine_class是什么呢?这还得从machine参数说起。
-machine pc-i440fx-trusty,accel=kvm,usb=off
这里的pc-i440fx是x86机器默认的体系结构。在hw/i386/pc_piix.c中,它定义了对应的machine_class。
DEFINE_I440FX_MACHINE(v4_0, "pc-i440fx-4.0", NULL,
pc_i440fx_4_0_machine_options);
#define DEFINE_I440FX_MACHINE(suffix, name, compatfn, optionfn) \
static void pc_init_##suffix(MachineState *machine) \
{ \
......
pc_init1(machine, TYPE_I440FX_PCI_HOST_BRIDGE, \
TYPE_I440FX_PCI_DEVICE); \
} \
DEFINE_PC_MACHINE(suffix, name, pc_init_##suffix, optionfn)
#define DEFINE_PC_MACHINE(suffix, namestr, initfn, optsfn) \
static void pc_machine_##suffix##_class_init(ObjectClass *oc, void *data
) \
{ \
MachineClass *mc = MACHINE_CLASS(oc); \
optsfn(mc); \
mc->init = initfn; \
} \
static const TypeInfo pc_machine_type_##suffix = { \
.name = namestr TYPE_MACHINE_SUFFIX, \
.parent = TYPE_PC_MACHINE, \
.class_init = pc_machine_##suffix##_class_init, \
}; \
static void pc_machine_init_##suffix(void) \
{ \
type_register(&pc_machine_type_##suffix); \
} \
type_init(pc_machine_init_##suffix)
为了定义machine_class,这里有一系列的宏定义。入口是DEFINE_I440FX_MACHINE。这个宏有几个参数,v4_0是后缀,"pc-i440fx-4.0"是名字,pc_i440fx_4_0_machine_options是一个函数,用于定义machine_class相关的选项。这个函数定义如下:
static void pc_i440fx_4_0_machine_options(MachineClass *m)
{
pc_i440fx_machine_options(m);
m->alias = "pc";
m->is_default = 1;
}
static void pc_i440fx_machine_options(MachineClass *m)
{
PCMachineClass *pcmc = PC_MACHINE_CLASS(m);
pcmc->default_nic_model = "e1000";
m->family = "pc_piix";
m->desc = "Standard PC (i440FX + PIIX, 1996)";
m->default_machine_opts = "firmware=bios-256k.bin";
m->default_display = "std";
machine_class_allow_dynamic_sysbus_dev(m, TYPE_RAMFB_DEVICE);
}
我们先不看pc_i440fx_4_0_machine_options,先来看DEFINE_I440FX_MACHINE。
这里面定义了一个pc_init_##suffix,也就是pc_init_v4_0。这里面转而调用pc_init1。注意这里这个函数只是定义了一下,没有被调用。
接下来,DEFINE_I440FX_MACHINE里面又定义了DEFINE_PC_MACHINE。它有四个参数,除了DEFINE_I440FX_MACHINE传进来的三个参数以外,多了一个initfn,也即初始化函数,指向刚才定义的pc_init_##suffix。
在DEFINE_PC_MACHINE中,我们定义了一个函数pc_machine_##suffix##class_init。从函数的名字class_init可以看出,这是machine_class从纸面上的class初始化为Class对象的方法。在这个函数里面,我们可以看到,它创建了一个MachineClass对象,这个就是Class对象。MachineClass对象的init函数指向上面定义的pc_init##suffix,说明这个函数是machine这种类型初始化的一个函数,后面会被调用。
接着,我们看DEFINE_PC_MACHINE。它定义了一个pc_machine_type_##suffix的TypeInfo。这是用于生成纸面上的class的原材料,果真后面调用了type_init。
看到了type_init,我们应该能够想到,既然它定义了一个纸面上的class,那上面的那句module_call_init,会和我们上面解析的type_init是一样的,在全局的表里面注册了一个全局的名字是"pc-i440fx-4.0"的纸面上的class,也即TypeImpl。
现在全局表中有这个纸面上的class了。我们回到select_machine。
static MachineClass *select_machine(void)
{
MachineClass *machine_class = find_default_machine();
const char *optarg;
QemuOpts *opts;
......
opts = qemu_get_machine_opts();
qemu_opts_loc_restore(opts);
optarg = qemu_opt_get(opts, "type");
if (optarg) {
machine_class = machine_parse(optarg);
}
......
return machine_class;
}
MachineClass *find_default_machine(void)
{
GSList *el, *machines = object_class_get_list(TYPE_MACHINE, false);
MachineClass *mc = NULL;
for (el = machines; el; el = el->next) {
MachineClass *temp = el->data;
if (temp->is_default) {
mc = temp;
break;
}
}
g_slist_free(machines);
return mc;
}
static MachineClass *machine_parse(const char *name)
{
MachineClass *mc = NULL;
GSList *el, *machines = object_class_get_list(TYPE_MACHINE, false);
if (name) {
mc = find_machine(name);
}
if (mc) {
g_slist_free(machines);
return mc;
}
......
}
在select_machine中,有两种方式可以生成MachineClass。一种方式是find_default_machine,找一个默认的;另一种方式是machine_parse,通过解析参数生成MachineClass。无论哪种方式,都会调用object_class_get_list获得一个MachineClass的列表,然后在里面找。object_class_get_list定义如下:
GSList *object_class_get_list(const char *implements_type,
bool include_abstract)
{
GSList *list = NULL;
object_class_foreach(object_class_get_list_tramp,
implements_type, include_abstract, &list);
return list;
}
void object_class_foreach(void (*fn)(ObjectClass *klass, void *opaque), const char *implements_type, bool include_abstract,
void *opaque)
{
OCFData data = { fn, implements_type, include_abstract, opaque };
enumerating_types = true;
g_hash_table_foreach(type_table_get(), object_class_foreach_tramp, &data);
enumerating_types = false;
}
在全局表type_table_get()中,对于每一项TypeImpl,我们都执行object_class_foreach_tramp。
static void object_class_foreach_tramp(gpointer key, gpointer value,
gpointer opaque)
{
OCFData *data = opaque;
TypeImpl *type = value;
ObjectClass *k;
type_initialize(type);
k = type->class;
......
data->fn(k, data->opaque);
}
static void type_initialize(TypeImpl *ti)
{
TypeImpl *parent;
......
ti->class_size = type_class_get_size(ti);
ti->instance_size = type_object_get_size(ti);
if (ti->instance_size == 0) {
ti->abstract = true;
}
......
ti->class = g_malloc0(ti->class_size);
......
ti->class->type = ti;
while (parent) {
if (parent->class_base_init) {
parent->class_base_init(ti->class, ti->class_data);
}
parent = type_get_parent(parent);
}
if (ti->class_init) {
ti->class_init(ti->class, ti->class_data);
}
}
在object_class_foreach_tramp中,会调用将type_initialize,这里面会调用class_init将纸面上的class也即TypeImpl变为ObjectClass,ObjectClass是所有Class类的祖先,MachineClass是它的子类。
因为在machine的命令行里面,我们指定了名字为"pc-i440fx-4.0",就肯定能够找到我们注册过了的TypeImpl,并调用它的class_init函数。
因而pc_machine_##suffix##class_init会被调用,在这里面,pc_i440fx_machine_options才真正被调用初始化MachineClass,并且将MachineClass的init函数设置为pc_init##suffix。也即,当select_machine执行完毕后,就有一个MachineClass了。
接着,我们回到object_new。这就很好理解了,MachineClass是一个Class类,接下来应该通过它生成一个Instance,也即对象,这就是object_new的作用。
Object *object_new(const char *typename)
{
TypeImpl *ti = type_get_by_name(typename);
return object_new_with_type(ti);
}
static Object *object_new_with_type(Type type)
{
Object *obj;
type_initialize(type);
obj = g_malloc(type->instance_size);
object_initialize_with_type(obj, type->instance_size, type);
obj->free = g_free;
return obj;
}
object_new中,TypeImpl的instance_init会被调用,创建一个对象。current_machine就是这个对象,它的类型是MachineState。
至此,绕了这么大一圈,有关体系结构的对象才创建完毕,接下来很多的设备的初始化,包括CPU和内存的初始化,都是围绕着体系结构的对象来的,后面我们会常常看到current_machine。
总结时刻
这一节,我们学到,虚拟机对于设备的模拟是一件非常复杂的事情,需要用复杂的参数模拟各种各样的设备。为了能够适配这些设备,qemu定义了自己的模块管理机制,只有了解了这种机制,后面看每一种设备的虚拟化的时候,才有一个整体的思路。
这里的MachineClass是我们遇到的第一个,我们需要掌握它里面各种定义之间的关系。
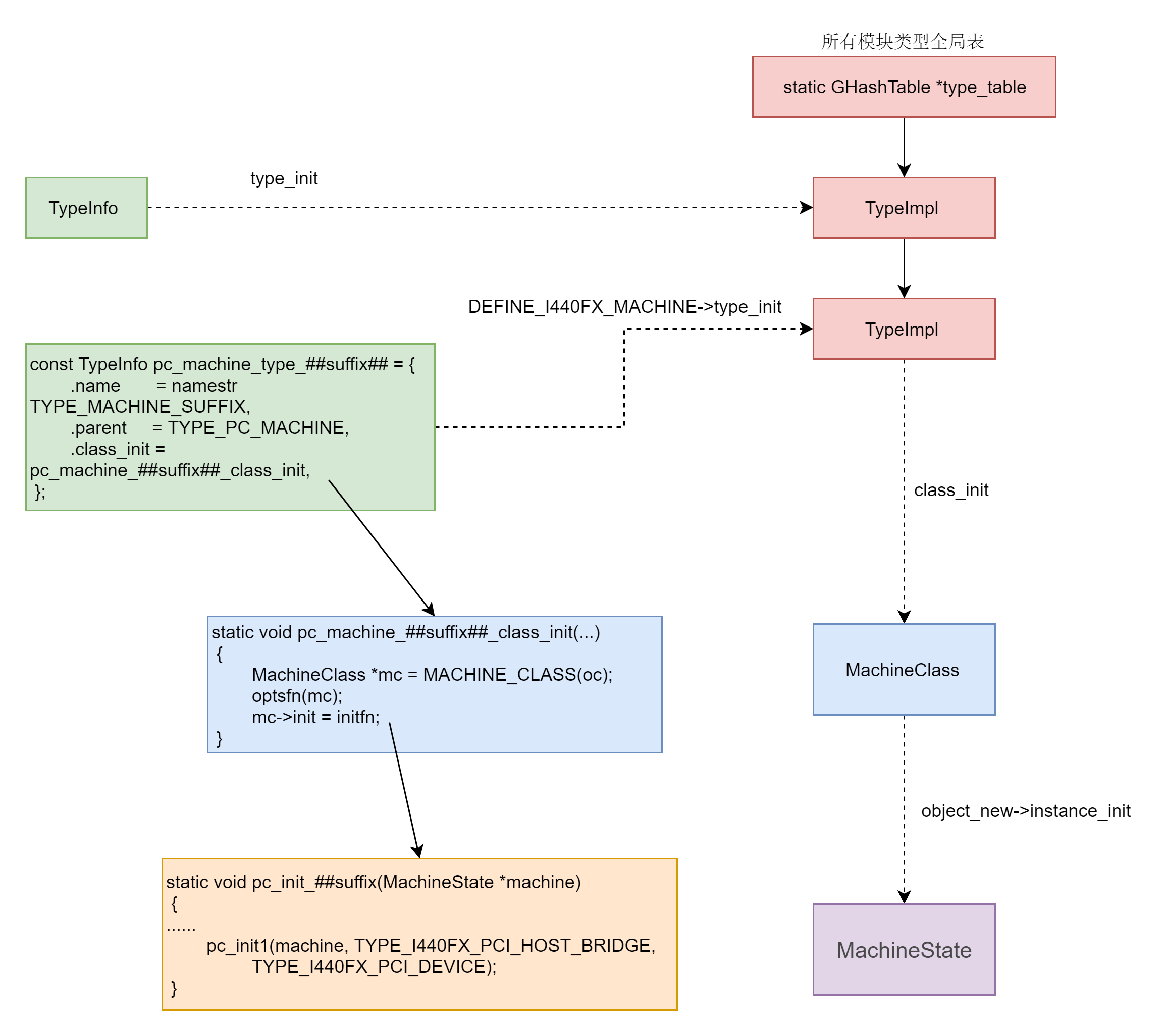
每个模块都会有一个定义TypeInfo,会通过type_init变为全局的TypeImpl。TypeInfo以及生成的TypeImpl有以下成员:
- name表示当前类型的名称
- parent表示父类的名称
- class_init用于将TypeImpl初始化为MachineClass
- instance_init用于将MachineClass初始化为MachineState
所以,以后遇到任何一个类型的时候,将父类和子类之间的关系,以及对应的初始化函数都要看好,这样就一目了然了。
课堂练习
你可能会问,这么复杂的qemu命令,我是怎么找到的,当然不是我一个字一个字打的,这是著名的云平台管理软件OpenStack创建虚拟机的时候自动生成的命令行。所以,给你留一道课堂练习题,请你看一下OpenStack的基本原理,看它是通过什么工具来管理如此复杂的命令行的。
欢迎留言和我分享你的疑惑和见解,也欢迎可以收藏本节内容,反复研读。你也可以把今天的内容分享给你的朋友,和他一起学习和进步。