14 KiB
05 | 索引(下):位移索引和时间戳索引的区别是什么?
你好,我是胡夕。今天,我们继续说索引那些事儿。
在上节课,我带你重点学习了Kafka源码中索引的抽象父类AbstractIndex。我分析了AbstractIndex类的大体对象结构,还介绍了社区改进版的二分查找算法在Kafka索引上的应用。
前面说过,Kafka索引类型有三大类:位移索引、时间戳索引和已中止事务索引。相比于最后一类索引,前两类索引的出镜率更高一些。在Kafka的数据路径下,你肯定看到过很多.index和.timeindex后缀的文件。不知你是否有过这样的疑问:“这些文件是用来做什么的呢?” 现在我可以明确告诉你:.index文件就是Kafka中的位移索引文件,而.timeindex文件则是时间戳索引文件。
那么,位移索引和时间戳索引到底是做什么用的呢?它们之间的区别是什么?今天,我就为你揭晓这些问题的答案。
位移索引
在学习Kafka的任何一类索引的时候,我们都要关注两个问题:
- 索引中的索引项是如何定义的?
- 如何向索引写入新的索引项?
看到这里,你可能会很疑惑:“等等,难道我们不需要关心如何查询索引吗?” 当然需要啦!上节课我们不是讲过二分查找算法在索引中的应用了吗?如果你觉得有点生疏了,那就赶快先去复习一下吧。
现在,我们先来看下索引项的定义。
索引项的定义
位移索引也就是所谓的OffsetIndex,它可是一个老资历的组件了。如果我没记错的话,国内大面积使用Kafka应该是在0.8时代。从那个时候开始,OffsetIndex就已经存在了。每当Consumer需要从主题分区的某个位置开始读取消息时,Kafka就会用到OffsetIndex直接定位物理文件位置,从而避免了因为从头读取消息而引入的昂贵的I/O操作。
在上节课,我提到过,不同索引类型保存不同的<Key, Value>对。就OffsetIndex而言,Key就是消息的相对位移,Value是保存该消息的日志段文件中该消息第一个字节的物理文件位置。
这里我来具体解释一下相对位移的含义。还记得AbstractIndex类中的抽象方法entrySize吗?它定义了单个<Key, Value>对所用的字节数。对于OffsetIndex来说,entrySize就是8,如OffsetIndex.scala中定义的那样:
override def entrySize = 8
为什么是8呢?相对位移是一个整型(Integer),占用4个字节,物理文件位置也是一个整型,同样占用4个字节,因此总共是8个字节。
那相对位移是什么值呢?我们知道,Kafka中的消息位移值是一个长整型(Long),应该占用8个字节才对。在保存OffsetIndex的<Key, Value>对时,Kafka做了一些优化。每个OffsetIndex对象在创建时,都已经保存了对应日志段对象的起始位移,因此,OffsetIndex索引项没必要保存完整的8字节位移值。相反地,它只需要保存与起始位移的差值(Delta)就够了,而这个差值是可以被整型容纳的。这种设计可以让OffsetIndex每个索引项都节省4个字节。
举个简单的例子。假设一个索引文件保存了1000个索引项,使用相对位移值就能节省大约4MB的空间,这是不是一件很划算的事情呢?
OffsetIndex定义了专门的方法,用于将一个Long型的位移值转换成相对位移,如下所示:
def relativeOffset(offset: Long): Int = {
val relativeOffset = toRelative(offset)
if (relativeOffset.isEmpty)
// 如果无法转换成功(比如差值超过了整型表示范围),则抛出异常
throw new IndexOffsetOverflowException(s"Integer overflow for offset: $offset (${file.getAbsoluteFile})")
relativeOffset.get
}
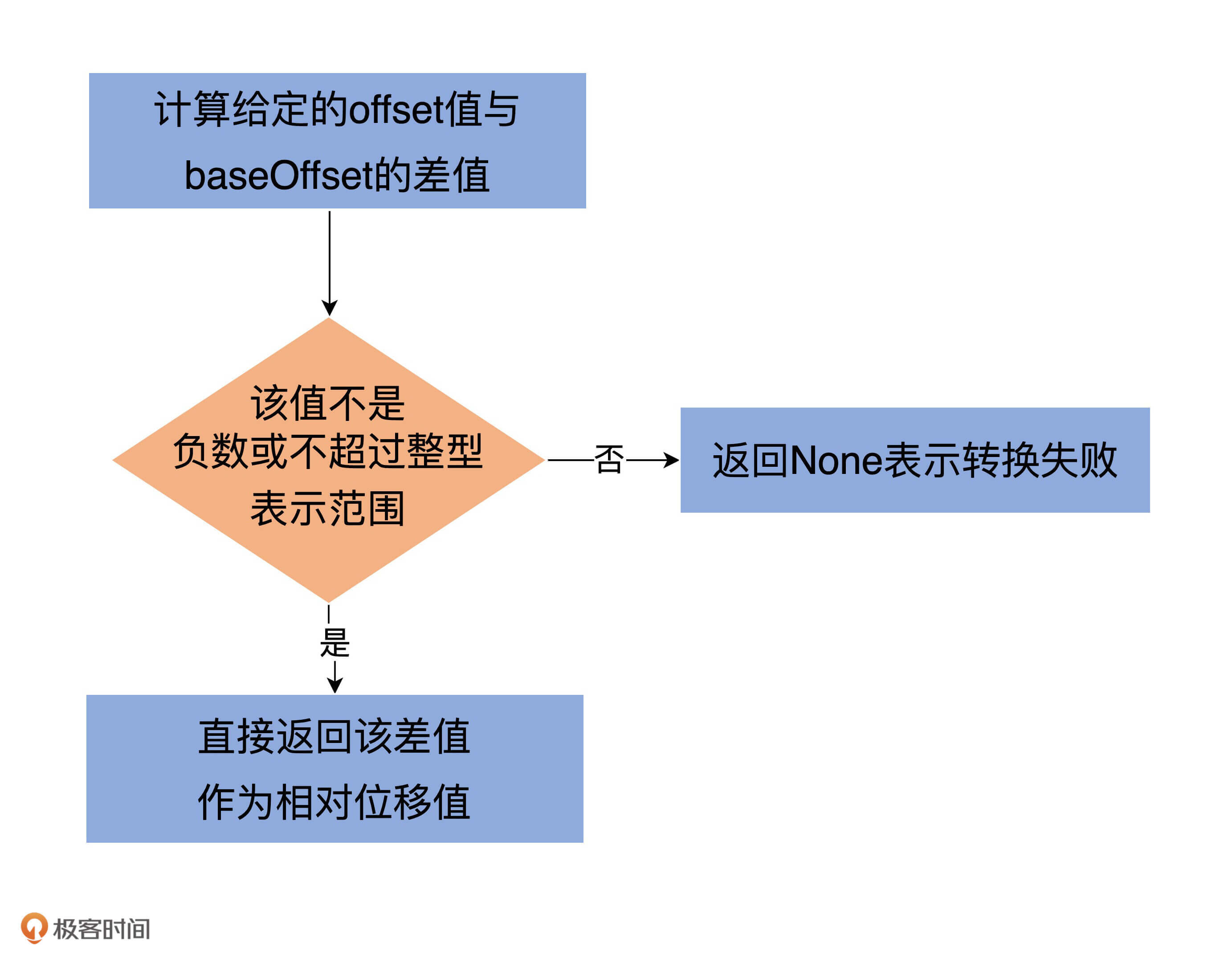
relativeOffset方法调用了父类的toRelative方法执行真正的转换。我们来看一下toRelative方法的实现。
private def toRelative(offset: Long): Option[Int] = {
val relativeOffset = offset - baseOffset
if (relativeOffset < 0 || relativeOffset > Int.MaxValue)
None
else
Some(relativeOffset.toInt)
}
逻辑很简单:第一步是计算给定的offset值与baseOffset的差值;第二步是校验该差值不能是负数或不能超过整型表示范围。如果校验通过,就直接返回该差值作为相对位移值,否则就返回None表示转换失败。
现在,你知道OffsetIndex中的索引项为什么是8个字节以及位移值是如何被转换成相对位移了吧?
当读取OffsetIndex时,源码还需要将相对位移值还原成之前的完整位移。这个是在parseEntry方法中实现的。
override protected def parseEntry(buffer: ByteBuffer, n: Int): OffsetPosition = {
OffsetPosition(baseOffset + relativeOffset(buffer, n), physical(buffer, n))
}
我来给你解释下具体的实现方法。
这个方法返回一个OffsetPosition类型。该类有两个方法,分别返回索引项的Key和Value。
这里的parseEntry方法,就是要构造OffsetPosition所需的Key和Value。Key是索引项中的完整位移值,代码使用baseOffset + relativeOffset(buffer, n)的方式将相对位移值还原成完整位移值;Value是这个位移值上消息在日志段文件中的物理位置,代码调用physical方法计算这个物理位置并把它作为Value。
最后,parseEntry方法把Key和Value封装到一个OffsetPosition实例中,然后将这个实例返回。
由于索引文件的总字节数就是索引项字节数乘以索引项数,因此,代码结合entrySize和buffer.getInt方法能够轻松地计算出第n个索引项所处的物理文件位置。这就是physical方法做的事情。
写入索引项
好了,有了这些基础,下面的内容就很容易理解了。我们来看下OffsetIndex中最重要的操作——写入索引项append方法的实现。
def append(offset: Long, position: Int): Unit = {
inLock(lock) {
// 索引文件如果已经写满,直接抛出异常
require(!isFull, "Attempt to append to a full index (size = " + _entries + ").")
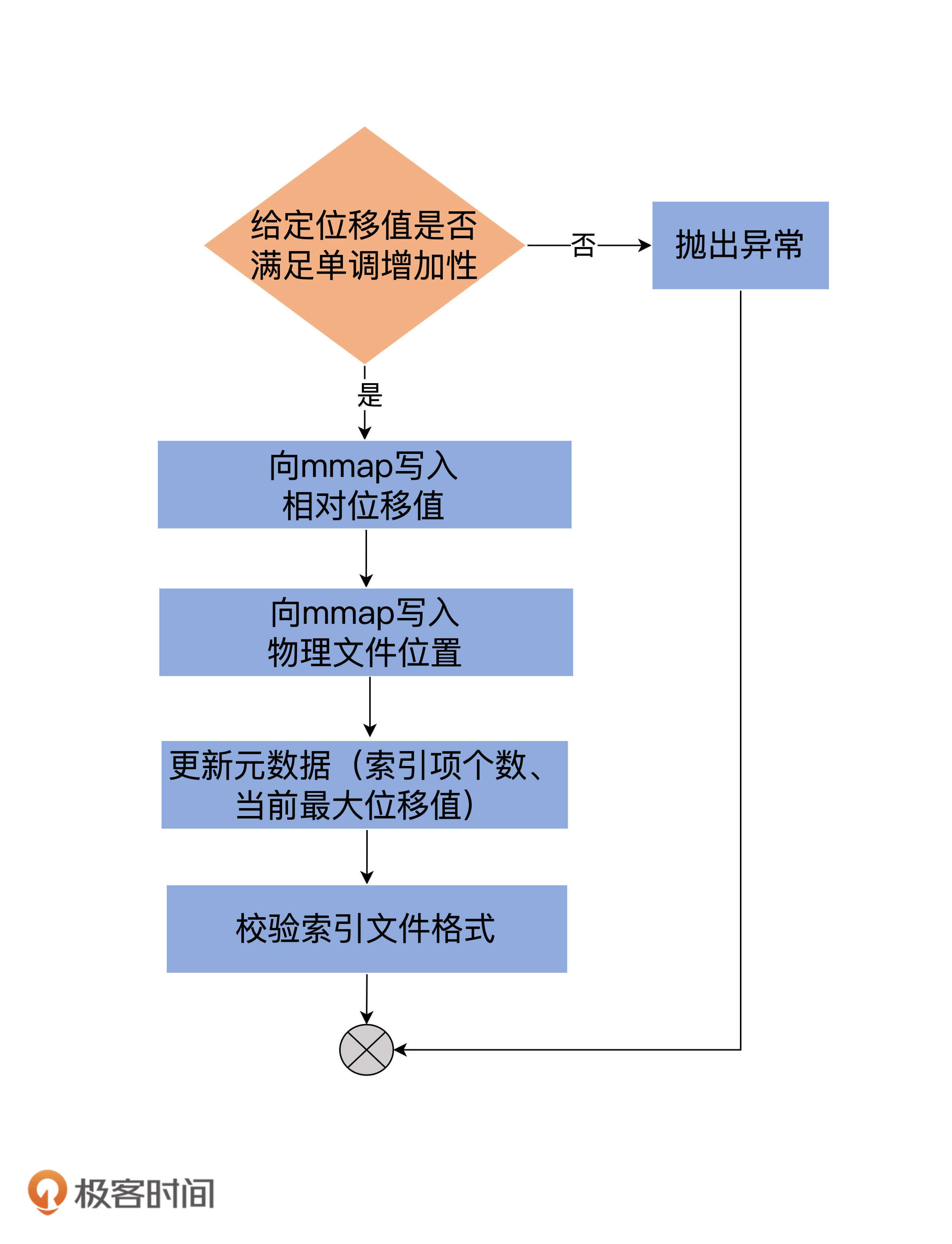
// 要保证待写入的位移值offset比当前索引文件中所有现存的位移值都要大
// 这主要是为了维护索引的单调增加性
if (_entries == 0 || offset > _lastOffset) {
trace(s"Adding index entry $offset => $position to ${file.getAbsolutePath}")
mmap.putInt(relativeOffset(offset)) // 向mmap写入相对位移值
mmap.putInt(position) // 向mmap写入物理文件位置
_entries += 1 // 更新索引项个数
_lastOffset = offset // 更新当前索引文件最大位移值
// 确保写入索引项格式符合要求
require(_entries * entrySize == mmap.position(), s"$entries entries but file position in index is ${mmap.position()}.")
} else {
throw new InvalidOffsetException(s"Attempt to append an offset ($offset) to position $entries no larger than" +
s" the last offset appended (${_lastOffset}) to ${file.getAbsolutePath}.")
}
}
}
append方法接收两个参数:Long型的位移值和Integer型的物理文件位置。该方法最重要的两步,就是分别向mmap写入相对位移值和物理文件位置。我使用一张图,来总结下append方法的执行流程:
除了append方法,索引还有一个常见的操作:截断操作(Truncation)。截断操作是指,将索引文件内容直接裁剪掉一部分。比如,OffsetIndex索引文件中当前保存了100个索引项,我想只保留最开始的40个索引项。源码定义了truncateToEntries方法来实现这个需求:
private def truncateToEntries(entries: Int): Unit = {
inLock(lock) {
_entries = entries
mmap.position(_entries * entrySize)
_lastOffset = lastEntry.offset
debug(s"Truncated index ${file.getAbsolutePath} to $entries entries;" +
s" position is now ${mmap.position()} and last offset is now ${_lastOffset}")
}
}
这个方法接收entries参数,表示要截取到哪个槽,主要的逻辑实现是调用mmap的position方法。源码中的_entries * entrySize就是mmap要截取到的字节处。
下面,我来说说OffsetIndex的使用方式。
既然OffsetIndex被用来快速定位消息所在的物理文件位置,那么必然需要定义一个方法执行对应的查询逻辑。这个方法就是lookup。
def lookup(targetOffset: Long): OffsetPosition = {
maybeLock(lock) {
val idx = mmap.duplicate // 使用私有变量复制出整个索引映射区
// largestLowerBoundSlotFor方法底层使用了改进版的二分查找算法寻找对应的槽
val slot = largestLowerBoundSlotFor(idx, targetOffset, IndexSearchType.KEY)
// 如果没找到,返回一个空的位置,即物理文件位置从0开始,表示从头读日志文件
// 否则返回slot槽对应的索引项
if(slot == -1)
OffsetPosition(baseOffset, 0)
else
parseEntry(idx, slot)
}
}
我把主要的逻辑以注释的方式加到了代码中。该方法返回的,是不大于给定位移值targetOffset的最大位移值,以及对应的物理文件位置。你大致可以把这个方法,理解为位移值的FLOOR函数。
时间戳索引
说完了OffsetIndex,我们来看另一大类索引:时间戳索引,即TimeIndex。与OffsetIndex类似,我们重点关注TimeIndex中索引项的定义,以及如何写入TimeIndex索引项。
索引项的定义
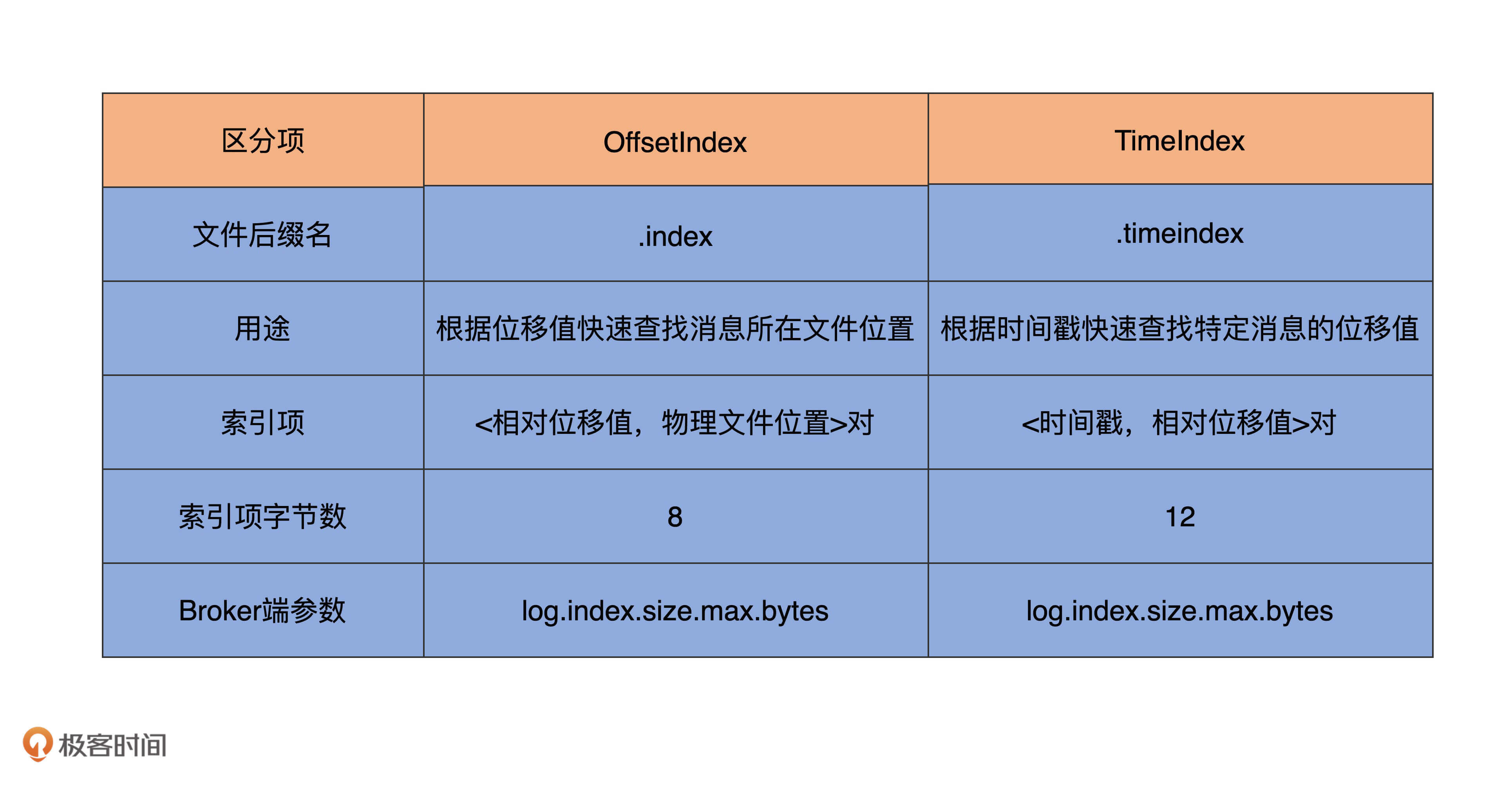
与OffsetIndex不同的是,TimeIndex保存的是<时间戳,相对位移值>对。时间戳需要一个长整型来保存,相对位移值使用Integer来保存。因此,TimeIndex单个索引项需要占用12个字节。这也揭示了一个重要的事实:在保存同等数量索引项的基础上,TimeIndex会比OffsetIndex占用更多的磁盘空间。
写入索引项
TimeIndex也有append方法,只不过它叫作maybeAppend。我们来看下它的实现逻辑。
def maybeAppend(timestamp: Long, offset: Long, skipFullCheck: Boolean = false): Unit = {
inLock(lock) {
if (!skipFullCheck)
// 如果索引文件已写满,抛出异常
require(!isFull, "Attempt to append to a full time index (size = " + _entries + ").")
// 确保索引单调增加性
if (_entries != 0 && offset < lastEntry.offset)
throw new InvalidOffsetException(s"Attempt to append an offset ($offset) to slot ${_entries} no larger than" +
s" the last offset appended (${lastEntry.offset}) to ${file.getAbsolutePath}.")
// 确保时间戳的单调增加性
if (_entries != 0 && timestamp < lastEntry.timestamp)
throw new IllegalStateException(s"Attempt to append a timestamp ($timestamp) to slot ${_entries} no larger" +
s" than the last timestamp appended (${lastEntry.timestamp}) to ${file.getAbsolutePath}.")
if (timestamp > lastEntry.timestamp) {
trace(s"Adding index entry $timestamp => $offset to ${file.getAbsolutePath}.")
mmap.putLong(timestamp) // 向mmap写入时间戳
mmap.putInt(relativeOffset(offset)) // 向mmap写入相对位移值
_entries += 1 // 更新索引项个数
_lastEntry = TimestampOffset(timestamp, offset) // 更新当前最新的索引项
require(_entries * entrySize == mmap.position(), s"${_entries} entries but file position in index is ${mmap.position()}.")
}
}
}
和OffsetIndex类似,向TimeIndex写入索引项的主体逻辑,是向mmap分别写入时间戳和相对位移值。只不过,除了校验位移值的单调增加性之外,TimeIndex还会确保顺序写入的时间戳也是单调增加的。
说到这里,我想到我当年读到这段代码时候的一个想法。那个时候,这段代码还没有加上时间戳单调增加的校验逻辑,我灵机一动,萌发了向TimeIndex写入一个过期时间戳的想法。一番动手操作之后,我真的向TimeIndex索引文件中写入了一个过期时间戳和位移。
你猜结果怎样?结果是引发了消费者端程序的彻底混乱。这是因为,当消费者端程序根据时间戳信息去过滤待读取的消息时,它读到了这个过期的时间戳并拿到了错误的位移值,因此返回了错误的数据。
为此,我还给社区提交了一个Jira,当时被驳回了——理由是不允许向TimeIndex写入过期时间戳。跟你说这个趣事儿只是想说明,有的时候,读源码会诱发很多灵感或奇思妙想,而这些东西是你在平时使用过程中不会想到的。这也算是阅读源码的一大收获吧。
区别
讲到这里,这节课就接近尾声了。最后,我用一张表格汇总下OffsetIndex和TimeIndex的特点和区别,希望能够帮助你更好地理解和消化今天的重点内容。
总结
今天,我带你详细分析了OffsetIndex和TimeIndex,以及它们的不同之处。虽然OffsetIndex和TimeIndex是不同类型的索引,但Kafka内部是把二者结合使用的。通常的流程是,先使用TimeIndex寻找满足时间戳要求的消息位移值,然后再利用OffsetIndex去定位该位移值所在的物理文件位置。因此,它们其实是合作的关系。
最后,我还想提醒你一点:**不要对索引文件做任何修改!**我碰到过因用户擅自重命名索引文件,从而导致Broker崩溃无法启动的场景。另外,虽然Kafka能够重建索引,但是随意地删除索引文件依然是一个很危险的操作。在生产环境中,我建议你尽量不要执行这样的操作。
课后讨论
OffsetIndex中的lookup方法实现了类似于FLOOR函数的位移查找逻辑。你能否对应写一个类似于CEILING函数的位移查找逻辑,即返回不小于给定位移值targetOffset的最小位移值和对应的物理文件位置?
欢迎你在留言区畅所欲言,跟我交流讨论,也欢迎你把今天的内容分享给你的朋友。