|
|
# 22 | 如何用仿射变换来移动和旋转3D物体?
|
|
|
|
|
|
你好,我是月影。
|
|
|
|
|
|
在前面的课程里,我们学习过使用仿射变换来移动和旋转二维图形。那在三维世界中,想要移动和旋转物体,我们也需要使用仿射变换。
|
|
|
|
|
|
但是,仿射变换该怎么从二维扩展到三维几何空间呢?今天,我们就来看一下三维仿射变换的基本方法,以及怎么对它进行优化。
|
|
|
|
|
|
三维仿射变换和二维仿射变换类似,也包括平移、旋转与缩放等等,而且具体的变换公式也相似。
|
|
|
|
|
|
比如,对于平移变换来说,如果向量$P(x\_{0},y\_{0},z\_{0})$沿着向量 $Q(x\_{1},y\_{1},z\_{1})$平移,我们只需要让$P$加上$Q$,就能得到变换后的坐标。
|
|
|
|
|
|
$$
|
|
|
\\left\\{\\begin{array}{l}
|
|
|
x=x\_{0}+x\_{1} \\\\\\
|
|
|
y=y\_{0}+y\_{1} \\\\\\
|
|
|
z=z\_{0}+z\_{1}
|
|
|
\\end{array}\\right.
|
|
|
$$
|
|
|
|
|
|
再比如,对于缩放变换来说,我们直接让三维向量乘上标量,就相当于乘上要缩放的倍数就可以了。最后我们得到的三维缩放变换矩阵如下:
|
|
|
|
|
|
$$
|
|
|
M=\\left\[\\begin{array}{ccc}
|
|
|
s\_{x} & 0 & 0 \\\\\\
|
|
|
0 & s\_{y} & 0 \\\\\\
|
|
|
0 & 0 & s\_{z}
|
|
|
\\end{array}\\right\]
|
|
|
$$
|
|
|
|
|
|
而且,我们也可以使用齐次矩阵来表示三维仿射变换,通过引入一个新的维度,就可以把仿射变换转换为齐次矩阵的线性变换了。
|
|
|
|
|
|
$$
|
|
|
M’=\\left\[\\begin{array}{ccc}
|
|
|
M & 0 \\\\\\
|
|
|
0 & 1
|
|
|
\\end{array}\\right\]
|
|
|
$$
|
|
|
|
|
|
这个齐次矩阵,是一个4X4的矩阵,其实它就是我们在[第20节课](https://time.geekbang.org/column/article/269494)提到的模型矩阵(ModelMatrix)。
|
|
|
|
|
|
总之,对于三维的仿射变换来说,平移和缩放都只是增加一个$z$分量,这和二维放射变换没有什么不同。但对于物体的旋转变换,三维就要比二维稍微复杂一些了。因为二维旋转只有一个参考轴,就是$z$轴,所以二维图形旋转都是围绕着$z$轴的。但是,三维物体的旋转却可以围绕$x、y、z$,这三个轴其中任意一个轴来旋转。
|
|
|
|
|
|
因此,这节课,我们就把重点放在处理三维物体的旋转变换上。
|
|
|
|
|
|
## 使用欧拉角来旋转几何体
|
|
|
|
|
|
我们先来看一下三维物体的旋转变换矩阵:
|
|
|
|
|
|
$$绕y轴旋转:R\_{y}=\\left\[\\begin{array}{ccc}\\cos \\alpha & 0 & \\sin \\alpha \\\\\\ 0 & 1 & 0 \\\\\\ -\\sin \\alpha & 0 & \\cos \\alpha\\end{array}\\right\]$$
|
|
|
|
|
|
$$绕x轴旋转:R\_{x}=\\left\[\\begin{array}{ccc}1 & 0 & 0 \\\\\\ 0 & \\cos \\beta & -\\sin \\beta \\\\\\ 0 & \\sin \\beta & \\cos \\beta\\end{array}\\right\]$$
|
|
|
|
|
|
$$绕z轴旋转:R\_{z}=\\left\[\\begin{array}{ccc}\\cos \\gamma & -\\sin \\gamma & 0 \\\\\\ \\sin \\gamma & \\cos \\gamma & 0 \\\\\\ 0 & 0 & 1\\end{array}\\right\]$$
|
|
|
|
|
|
你会看到,我们使用了三个旋转矩阵$Ry、Rx、Rz$来描述三维的旋转变换。这三个旋转矩阵分别表示几何体绕$y$轴、$x$轴、$z$轴转过$α、β、γ$角。而这三个角,就叫做**欧拉角。**
|
|
|
|
|
|
### 什么是欧拉角?
|
|
|
|
|
|
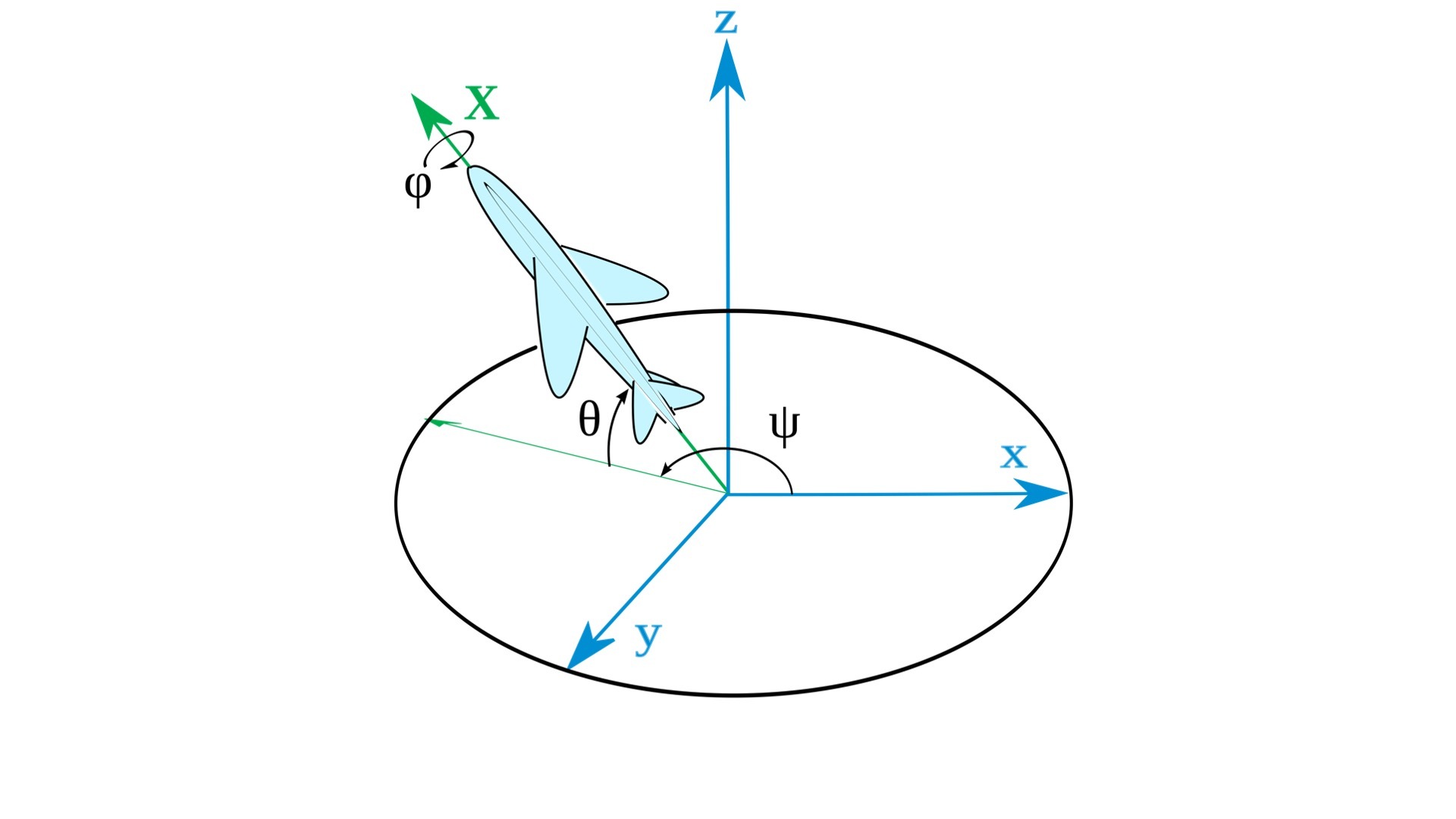
那什么是欧拉角呢?欧拉角是描述三维物体在空间中取向的标准数学模型,也是航空航天普遍采用的标准。对于在三维空间里的一个[参考系](https://baike.baidu.com/item/%E5%8F%82%E7%85%A7%E7%B3%BB/1531482?fromtitle=%E5%8F%82%E8%80%83%E7%B3%BB&fromid=823115&fr=aladdin),任何坐标系的取向,都可以用三个欧拉角来表示。
|
|
|
|
|
|
举个例子,下图中这个飞机的飞行姿态,可以由绕$x$轴的旋转角度(翻滚机身)、绕$y$轴的旋转角度(俯仰),以及绕$z$轴的旋转角度(偏航)来表示。
|
|
|
|
|
|
|
|
|
|
|
|
也就是说,这个飞机的姿态可以由这三个欧拉角来确定。具体的表示公式就是$Rx、Ry、Rz$,这三个旋转矩阵相乘。
|
|
|
|
|
|
$$M=R\_{y} \\times R\_{x} \\times R\_{z}$$
|
|
|
|
|
|
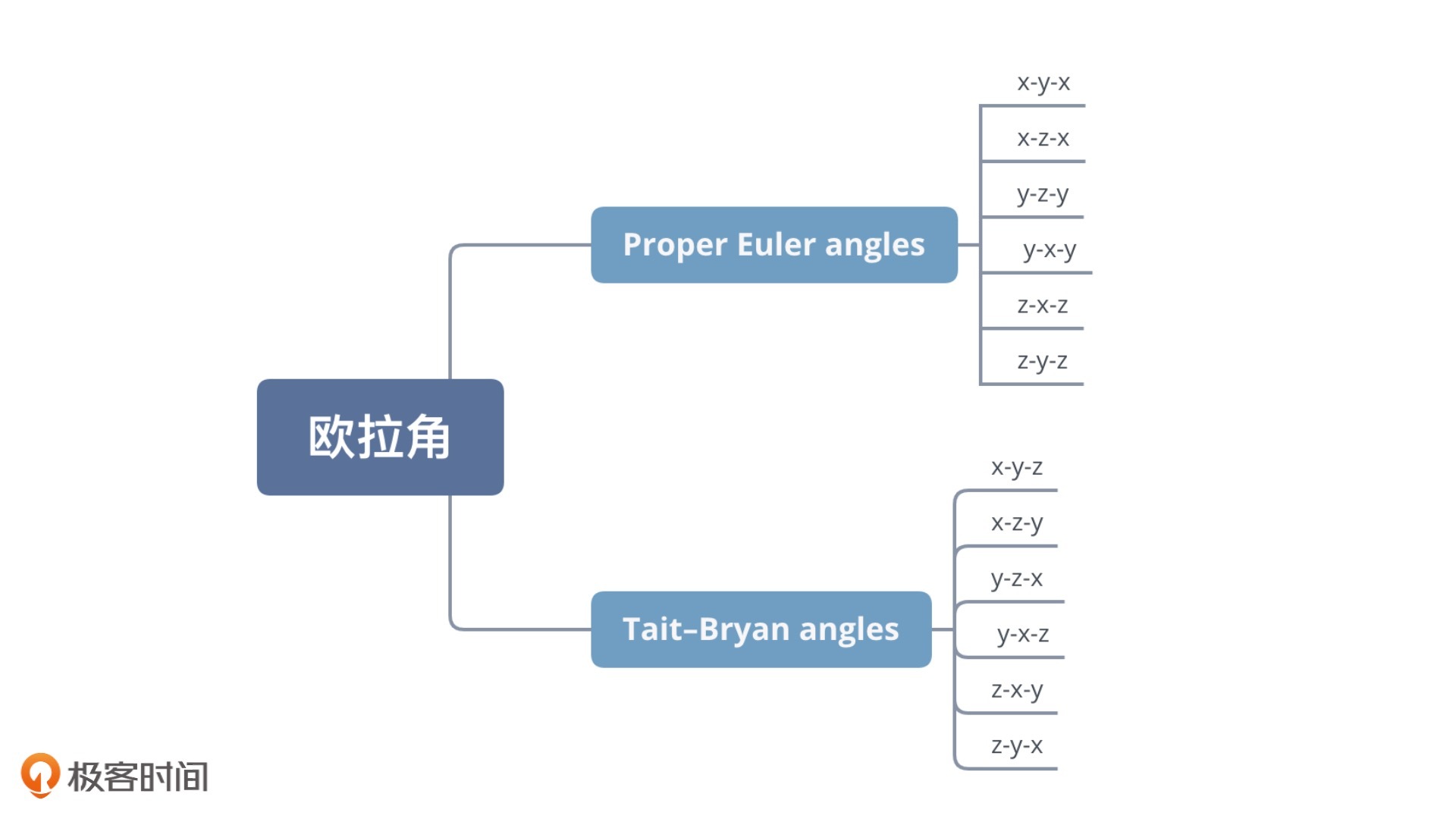
这里,我们是按照$Ry、Rx、Rz$的顺序相乘的。而$y-x-z$顺序有一个专属的名字叫做欧拉角的**顺规**,也就是说,我们现在采用的是$y-x-z$顺规。欧拉角有很多种不同的顺规表示方式,一共可以分两种:一种叫做**Proper Euler angles**,包含六种顺规,分别是$z-x-z、x-y-x、y-z-y、z-y-z、x-z-x、y-x-y$;另一种叫做**Tait–Bryan angles**,也包含六种顺规,分别是$x-y-z、y-z-x、z-x-y、x-z-y、z-y-x、 y-x-z$。
|
|
|
|
|
|
|
|
|
|
|
|
显然,我们采用的 $y-x-z$ 顺规,属于**Tait–Bryan angles。**
|
|
|
|
|
|
不同的欧拉角顺规虽然表示方法不同,但它们本质上还是欧拉角,都可以表示三维几何空间中的任意取向。所以,我们在绘制三维图形的时候,使用任何一种表示法都可以。今天,我就以$y-x-z$顺规为例来接着讲。
|
|
|
|
|
|
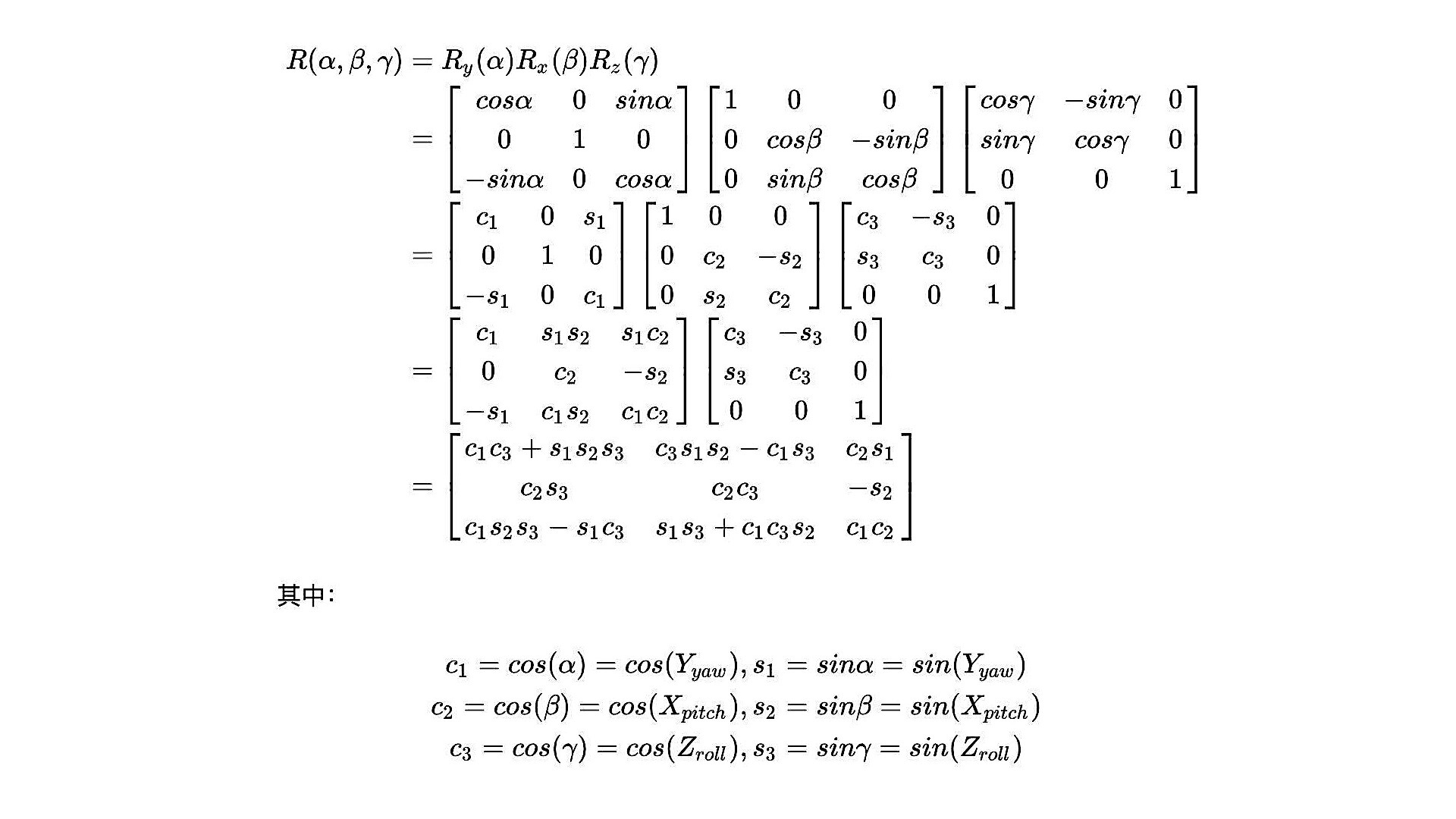
采用$y-x-z$顺规的欧拉角之后,我们能得到如下的旋转矩阵结果:
|
|
|
|
|
|
|
|
|
|
|
|
### 如何使用欧拉角来旋转几何体?
|
|
|
|
|
|
接下来,我们通过一个例子来实际体会,使用欧拉角旋转几何体的具体过程。
|
|
|
|
|
|
这里,我们还是用OGL框架。OGL的几何网格(Mesh)对象直接支持欧拉角,我们直接用对象的rotation属性就可以设置欧拉角,rotation属性是一个三维向量,它的$x、y、z$坐标就对应围绕$x、y、z$旋转的欧拉角。而且OGL框架默认的欧拉角顺规是$y-x-z$。
|
|
|
|
|
|
为了增加趣味性,我们不用立方体、圆柱体这些一般几何体,而是旋转一个飞机的几何模型。
|
|
|
|
|
|
在OGL中,我们可以加载JSON文件,来载入预先设计好的几何模型。
|
|
|
|
|
|
下面就是我先封装好的,一个加载几何模型的函数。这个函数会载入JSON文件的内容,然后根据其中的数据创建Geometry对象,并返回这个对象。
|
|
|
|
|
|
```
|
|
|
async function loadModel(src) {
|
|
|
const data = await (await fetch(src)).json();
|
|
|
|
|
|
const geometry = new Geometry(gl, {
|
|
|
position: {size: 3, data: new Float32Array(data.position)},
|
|
|
uv: {size: 2, data: new Float32Array(data.uv)},
|
|
|
normal: {size: 3, data: new Float32Array(data.normal)},
|
|
|
});
|
|
|
|
|
|
return geometry;
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
这样,我们通过如下指令,就可以加载飞机几何体模型了。
|
|
|
|
|
|
```
|
|
|
const geometry = await loadModel('../assets/airplane.json');
|
|
|
|
|
|
```
|
|
|
|
|
|
这里的assets/airplane.json是一份几何模型文件,内容类似于下面这样:
|
|
|
|
|
|
```
|
|
|
{
|
|
|
"position": [0.752, 1.061, 0.0, 0.767...],
|
|
|
"normal": [0.975, 0.224, 0.0, 0.975...],
|
|
|
"uv": [0.745, 0.782, 0.705, 0.769...]
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
其中position、normal、uv是顶点数据,我们比较熟悉,分别是顶点坐标、法向量和纹理坐标。这样的数据一般是由设计工具直接生成的,不需要我们来计算。
|
|
|
|
|
|
接下来,我们加载飞机的纹理图片,同样要先封装一个加载图片纹理的函数。在函数里,我们用img元素加载图片,然后将图片赋给对应的纹理对象。函数代码如下:
|
|
|
|
|
|
```
|
|
|
function loadTexture(src) {
|
|
|
const texture = new Texture(gl);
|
|
|
return new Promise((resolve) => {
|
|
|
const img = new Image();
|
|
|
img.onload = () => {
|
|
|
texture.image = img;
|
|
|
resolve(texture);
|
|
|
};
|
|
|
img.src = src;
|
|
|
});
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
接着,我们就可以加载飞机的纹理图片了。具体操作如下:
|
|
|
|
|
|
```
|
|
|
const texture = await loadTexture('../assets/airplane.jpg');
|
|
|
|
|
|
```
|
|
|
|
|
|
然后,我们在片元着色器中,直接读取纹理图片中的颜色信息:
|
|
|
|
|
|
```
|
|
|
precision highp float;
|
|
|
|
|
|
uniform sampler2D tMap;
|
|
|
varying vec2 vUv;
|
|
|
|
|
|
void main() {
|
|
|
gl_FragColor = texture2D(tMap, vUv);
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
最后,我们就能将元素渲染出来了。渲染指令如下:
|
|
|
|
|
|
```
|
|
|
const program = new Program(gl, {
|
|
|
vertex,
|
|
|
fragment,
|
|
|
uniforms: {
|
|
|
tMap: {value: texture},
|
|
|
},
|
|
|
});
|
|
|
const mesh = new Mesh(gl, {geometry, program});
|
|
|
mesh.setParent(scene);
|
|
|
renderer.render({scene, camera});
|
|
|
|
|
|
```
|
|
|
|
|
|
最终,我们就能得到可以随意调整欧拉角的飞机模型了,效果如下图所示:
|
|
|
|
|
|

|
|
|
|
|
|
## 如何理解万向节锁?
|
|
|
|
|
|
使用欧拉角来操作几何体的方向,虽然很简单,但是有一个小缺陷,这个缺陷叫做万向节锁(Gimbal Lock)。那万向节锁是什么呢,我们通过上面的例子来解释。
|
|
|
|
|
|
你会发现,当我们分别改变飞机的alpha、beta、theta值时,飞机会做出对应的姿态调整,包括偏航(改变alpha)、翻滚(改变beta)和俯仰(改变theta)。
|
|
|
|
|
|
但是如果我们将beta固定在正负90度,改变alpha和beta,我们会发现一个奇特的现象:
|
|
|
|
|
|
|
|
|
|
|
|
如上图所示,我们将beta设为90度,不管改变alpha还是改变theta,飞机都绕着$y$轴旋转,始终处于一个平面上。也就是说,本来飞机姿态有$x、y、z$三个自由度,现在$y$轴被固定了,只剩下两个自由度了,这就是万向节锁。
|
|
|
|
|
|
万向节锁,并不是真的“锁”住。而是在特定的欧拉角情况下,姿态调整的自由度丢失了。而且,只要是欧拉角,不管我们使用哪一种顺规,万向节锁都会存在。这该怎么解决呢?
|
|
|
|
|
|
要避免万向节锁的产生,我们只能使用其他的数学模型,来代替欧拉角描述几何体的旋转。其中一个比较好的模型是**四元数**(Quaternion)。
|
|
|
|
|
|
## 使用四元数来旋转几何体
|
|
|
|
|
|
四元数是一种高阶复数,一个四元数可以表示为:$q = w + xi + yj + zk$。其中,$i、j、k$是三个虚数单位,$w$是标量,它们满足$i^{2} = j^{2} = k^{2} = ijk = -1$。如果我们把 $xi + yj + zk$ 看成是一个向量,那么四元数$q$又可以表示为 $q=(v, w)$,其中$v$是一个三维向量。
|
|
|
|
|
|
我们可以用单位四元数来描述3D旋转。所谓单位四元数,就是其中的参数满足 $x^{2} + y^{2} + z^{2} + w^{2}= 1$。单位四元数对应的旋转矩阵如下:
|
|
|
|
|
|
$$
|
|
|
R(q)=\\left\[\\begin{array}{ccc}
|
|
|
1-2 y^{2}-2 z^{2} & 2 x y-2 z w & 2 x z+2 y w \\\\\\
|
|
|
2 x y+2 z w & 1-2 x^{2}-2 z^{2} & 2 y z-2 x w \\\\\\
|
|
|
2 x z-2 y w & 2 y z+2 x w & 1-2 x^{2}-2 y^{2}
|
|
|
\\end{array}\\right\]
|
|
|
$$
|
|
|
|
|
|
这个旋转矩阵的[数学推导过程](https://krasjet.github.io/quaternion/quaternion.pdf)比较复杂,我们只要记住这个公式就行了。
|
|
|
|
|
|
与欧拉角相比,四元数没有万向节死锁的问题。而且与旋转矩阵相比,四元数只需要四个分量就可以定义,模型上更加简洁。但是,四元数相对来说没有旋转矩阵和欧拉角那么直观。
|
|
|
|
|
|
### 四元数与轴角
|
|
|
|
|
|
四元数有一个常见的用途是用来处理**轴角**。所谓轴角,就是在三维空间中,给定一个由单位向量表示的轴,以及一个旋转角度$⍺$,以此来表示几何体绕该轴旋转$⍺$角。
|
|
|
|
|
|
[](https://zinghd.gitee.io/Att-err3/)
|
|
|
|
|
|
绕单位向量$u$旋转$⍺$角,对应的四元数可以表示为:$q = (usin(⍺/2), cos(⍺/2))$。接着,我们来看一个四元数处理轴角的例子。
|
|
|
|
|
|
还是以前面飞机为例,不过,这次我们将欧拉角换成轴角,实现一个updateAxis和updateQuaternion函数,分别更新轴和四元数。
|
|
|
|
|
|
```
|
|
|
// 更新轴
|
|
|
function updateAxis() {
|
|
|
const {x, y, z} = palette;
|
|
|
const v = new Vec3(x, y, z).normalize().scale(10);
|
|
|
points[1].copy(v);
|
|
|
axis.updateGeometry();
|
|
|
renderer.render({scene, camera});
|
|
|
}
|
|
|
|
|
|
// 更新四元数
|
|
|
function updateQuaternion(val) {
|
|
|
const theta = 0.5 * val / 180 * Math.PI;
|
|
|
const c = Math.cos(theta);
|
|
|
const s = Math.sin(theta);
|
|
|
const p = new Vec3().copy(points[1]).normalize();
|
|
|
const q = new Quat(p.x * s, p.y * s, p.z * s, c);
|
|
|
mesh.quaternion = q;
|
|
|
renderer.render({scene, camera});
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
然后,我们定义轴, 再把它显示出来。在OGL里面,我们可以通过Polyline对象来绘制轴。代码如下:
|
|
|
|
|
|
```
|
|
|
const points = [
|
|
|
new Vec3(0, 0, 0),
|
|
|
new Vec3(0, 10, 0),
|
|
|
];
|
|
|
|
|
|
const axis = new Polyline(gl, {
|
|
|
points,
|
|
|
uniforms: {
|
|
|
uColor: {value: new Color('#f00')},
|
|
|
uThickness: {value: 3},
|
|
|
},
|
|
|
});
|
|
|
axis.mesh.setParent(scene);
|
|
|
|
|
|
```
|
|
|
|
|
|
那么,随着我们修改轴或者修改旋转角,物体就会绕着轴旋转。效果如下图所示:
|
|
|
|
|
|
|
|
|
|
|
|
这样,我们就实现了用四元数让飞机沿着某个轴旋转的效果了。这其中最重要的一步,是要你理解怎么根据旋转轴和轴角来计算对应的四元数,也就是updateQuaternion函数里面做的事情。然后我们将这个更新后的四元数赋给飞机的mesh对象,就可以更新飞机的位置,实现飞机绕轴的旋转。我只在课程中给出了关键部分的代码,你可以去GitHub仓库里找到对应例子的完整代码。
|
|
|
|
|
|
## 要点总结
|
|
|
|
|
|
今天,我们学习了使用三维仿射变换,来移动和旋转3D物体。三维仿射变换在平移和缩放变换上的绘制方法,与二维仿射变换类似,只不过增加了一个z维度。但是对于旋转变换,三维放射变换就要复杂一些了,因为3D物体可以绕$x、y、z$轴中任意一个方向旋转。
|
|
|
|
|
|
那想要旋转三维几何体,我们可以使用欧拉角。欧拉角实际上就等于,绕$x、y、z$三个轴方向的旋转矩阵相乘,相乘的顺序就是欧拉角的顺规。
|
|
|
|
|
|
虽然顺规有很多种,但是选择不同的顺规,只是表达方式不一样,最终结果是等价的,都是欧拉角。那在这节课中,我们采用$y-x-z$顺规,它也是OGL库默认采用的。
|
|
|
|
|
|
但是欧拉角有一个万向节锁的问题,就是当$β$角旋转到正负90度的时候,我们无论怎么改变$α、γ$角,都只能让物体在一个水平面上运动。而且,只要我们使用欧拉角,就无法避免万向节锁的出现。
|
|
|
|
|
|
为了避免万向节锁,我们可以用四元数来旋转几何体。除此之外,四元数还有一个作用是可以用来构造轴角,让物体沿着某个具体的轴旋转。你可以回想一下我们刚刚实现的绕轴飞行的飞机。
|
|
|
|
|
|
## 小试牛刀
|
|
|
|
|
|
你可以试着利用放射变换,来实现一个旋转的3D陀螺效果。陀螺的形状可以用一个简单的圆锥体来表示。旋转的过程中,你可以让陀螺绕自身的中间轴旋转,也可以让它绕着三维空间某个固定的轴旋转。快来动手试一试吧。效果如下:
|
|
|
|
|
|
|
|
|
|
|
|
除了旋转的飞机和旋转的陀螺,你还能实现哪些旋转的物体呢?不如也把这篇文章分享给你的朋友们,一起来实现一下吧!
|
|
|
|
|
|
* * *
|
|
|
|
|
|
## 源码
|
|
|
|
|
|
课程中详细示例代码[GitHub仓库](https://github.com/akira-cn/graphics/tree/master/3d-model)
|
|
|
|
|
|
## 推荐阅读
|
|
|
|
|
|
\[1\] [进一步理解欧拉角](https://en.wikipedia.org/wiki/Euler_angles)
|
|
|
\[2\] [欧拉角的不同表示方法参考文档](https://en.wikipedia.org/wiki/Euler_angles)
|
|
|
\[3\] [四元数与三维旋转](https://krasjet.github.io/quaternion/quaternion.pdf)
|
|
|
\[4\] [三维旋转:欧拉角、四元数、旋转矩阵、轴角之间的转换](https://zhuanlan.zhihu.com/p/45404840)
|
|
|
|