|
|
# 22 | 并发:协程不需要处理同步吗?
|
|
|
|
|
|
你好,我是朱涛。今天我们来讲讲协程的并发。
|
|
|
|
|
|
在大型软件的架构当中,并发也是一个不可避免的问题。然而,在传统的Java编程当中,并发却是个令人生畏的话题。因为Java的线程模型、内存模型、同步机制太复杂了,而当复杂的业务逻辑与复杂的并发模型混合在一起的时候,情况就更糟糕了!如果你用Java做过中大型软件,对此一定会深有体会。
|
|
|
|
|
|
我们都知道,Kotlin的协程仍然是基于线程运行的。但是,经过一层封装以后,Kotlin协程面对并发问题的时候,它的处理手段其实跟Java就大不一样。所以这节课,我们就来看看协程在并发问题上的处理,一起来探究下Kotlin协程的并发思路,从而真正解决并发的难题。
|
|
|
|
|
|
## 协程与并发
|
|
|
|
|
|
在Java世界里,并发往往需要多个线程一起工作,而多线程往往就会有共享的状态,这时候程序就要处理同步问题了。很多初学者在这一步,都会把协程与线程的概念混淆在一起。比如你可以来看看下面这段代码,你觉得有多线程同步的问题吗?
|
|
|
|
|
|
```plain
|
|
|
// 代码段1
|
|
|
|
|
|
fun main() = runBlocking {
|
|
|
var i = 0
|
|
|
|
|
|
// Default 线程池
|
|
|
launch(Dispatchers.Default) {
|
|
|
repeat(1000) {
|
|
|
i++
|
|
|
}
|
|
|
}
|
|
|
|
|
|
delay(1000L)
|
|
|
|
|
|
println("i = $i")
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
在这段代码里,我是在Default线程池上创建了一个协程,然后对变量i进行了1000次自增操作,接着我又delay了一小会儿,防止程序退出,最后输出结果。
|
|
|
|
|
|
那么,在面对这段代码的时候,你也许会觉得,Default线程池内部是多个线程,因此就需要考虑多线程同步的问题。其实,这就是典型的把协程、线程混淆的例子。
|
|
|
|
|
|
如果你仔细分析上面的代码,会发现**代码中压根就没有并发执行的任务**,除了runBlocking,我只在launch当中创建了一个协程,所有的计算都发生在一个协程当中。所以,在这种情况下你根本就不需要考虑同步的问题。
|
|
|
|
|
|
我们再来看看多个协程并发执行的例子。
|
|
|
|
|
|
```plain
|
|
|
// 代码段2
|
|
|
|
|
|
fun main() = runBlocking {
|
|
|
var i = 0
|
|
|
val jobs = mutableListOf<Job>()
|
|
|
|
|
|
// 重复十次
|
|
|
repeat(10){
|
|
|
val job = launch(Dispatchers.Default) {
|
|
|
repeat(1000) {
|
|
|
i++
|
|
|
}
|
|
|
}
|
|
|
jobs.add(job)
|
|
|
}
|
|
|
|
|
|
// 等待计算完成
|
|
|
jobs.joinAll()
|
|
|
|
|
|
println("i = $i")
|
|
|
}
|
|
|
/*
|
|
|
输出结果
|
|
|
i = 9972
|
|
|
*/
|
|
|
|
|
|
```
|
|
|
|
|
|
在上面的代码中,我创建了10个协程任务,每个协程任务都会工作在Default线程池,这10个协程任务,都会分别对i进行1000次自增操作。如果一切正常的话,代码的输出结果应该是10000。但如果你实际运行这段代码,你会发现结果大概率不会是10000。
|
|
|
|
|
|
出现这个问题的原因也很简单,这10个协程分别运行在不同的线程之上,与此同时,这10个协程之间还共享着i这个变量,并且它们还会以并发的形式对i进行自增,所以自然就会产生同步的问题。
|
|
|
|
|
|
> 补充:为了不偏离主题,这里我们不去深究出现这个问题的底层原因。这涉及到Java内存模型之类的底层细节,如果你不熟悉Java并发相关的知识点,可以自行去做一些了解。
|
|
|
|
|
|
所以在这里,我们就可以回答这节课标题里的问题了:**Kotlin协程也需要处理多线程同步的问题**。
|
|
|
|
|
|
那么下面,我们就以这个简单的代码为例,一起来分析下Kotlin协程面对并发时,都有哪些可用的手段。
|
|
|
|
|
|
## 借鉴Java的并发思路
|
|
|
|
|
|
首先,由于Kotlin协程也是基于JVM的,所以,当我们面对并发问题的时候,脑子里第一时间想到的肯定是Java当中的同步手段,比如synchronized、Atomic、Lock,等等。
|
|
|
|
|
|
在Java当中,最简单的同步方式就是synchronized同步了。那么换到Kotlin里,我们就可以使用 **@Synchronized注解**来修饰函数,也可以使用 **synchronized(){}** 的方式来实现同步代码块。
|
|
|
|
|
|
让我们用synchronized来改造一下上面的代码段2:
|
|
|
|
|
|
```plain
|
|
|
// 代码段3
|
|
|
|
|
|
fun main() = runBlocking {
|
|
|
var i = 0
|
|
|
val lock = Any() // 变化在这里
|
|
|
|
|
|
val jobs = mutableListOf<Job>()
|
|
|
|
|
|
repeat(10){
|
|
|
val job = launch(Dispatchers.Default) {
|
|
|
repeat(1000) {
|
|
|
// 变化在这里
|
|
|
synchronized(lock) {
|
|
|
i++
|
|
|
}
|
|
|
}
|
|
|
}
|
|
|
jobs.add(job)
|
|
|
}
|
|
|
|
|
|
jobs.joinAll()
|
|
|
|
|
|
println("i = $i")
|
|
|
}
|
|
|
|
|
|
/*
|
|
|
输出结果
|
|
|
i = 10000
|
|
|
*/
|
|
|
|
|
|
```
|
|
|
|
|
|
以上代码中,我们创建了一个lock对象,然后使用synchronized(){} 将“i++”包裹了起来。这样就可以确保在自增的过程中不会出现同步问题。这时候,如果你再来运行代码,就会发现结果已经是10000了。
|
|
|
|
|
|
不过,如果你在实际生产环境使用过协程的话,应该会感觉synchronized在协程当中也不是一直都很好用的。毕竟,**synchronized是线程模型下的产物**。
|
|
|
|
|
|
就比如说,假设我们这里的自增操作需要一些额外的操作,需要用到挂起函数prepare()。
|
|
|
|
|
|
```plain
|
|
|
// 代码段4
|
|
|
|
|
|
fun main() = runBlocking {
|
|
|
suspend fun prepare(){
|
|
|
// 模拟准备工作
|
|
|
}
|
|
|
var i = 0
|
|
|
val lock = Any()
|
|
|
|
|
|
val jobs = mutableListOf<Job>()
|
|
|
|
|
|
repeat(10){
|
|
|
val job = launch(Dispatchers.Default) {
|
|
|
repeat(1000) {
|
|
|
synchronized(lock) {
|
|
|
// 编译器报错!
|
|
|
prepare()
|
|
|
i++
|
|
|
}
|
|
|
}
|
|
|
}
|
|
|
jobs.add(job)
|
|
|
}
|
|
|
|
|
|
jobs.joinAll()
|
|
|
|
|
|
println("i = $i")
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
这时候,你就不能天真地把协程看作是“Java线程池的封装”,然后继续照搬Java的同步手段了。你会发现:**synchronized(){} 当中调用挂起函数,编译器会给你报错!**
|
|
|
|
|
|
这是为什么呢?其实,如果你理解了[第15讲](https://time.geekbang.org/column/article/487085)当中“协程挂起恢复”的思维模型的话,那么编译器报错的原因你一定可以轻松理解。因为这里的挂起函数会被翻译成带有Continuation的异步函数,从而就造成了synchronid代码块无法正确处理同步。
|
|
|
|
|
|
另外从这个例子里,我们也可以看出:即使Kotlin协程是基于Java线程的,但它其实已经脱离Java原本的范畴了。所以,单纯使用Java的同步手段,是无法解决Kotlin协程里所有问题的。
|
|
|
|
|
|
那么接下来,我们就来看看Kotlin协程当中的并发思路。
|
|
|
|
|
|
## 协程的并发思路
|
|
|
|
|
|
前面我也提到过,由于Java的线程模型是阻塞式的,比如说Thread.sleep(),所以在Java当中,并发往往就意味着多线程,而多线程则往往会有状态共享,而状态共享就意味着要处理同步问题。
|
|
|
|
|
|
但是,因为Kotlin协程具备挂起、恢复的能力,而且还有非阻塞的特点,所以在使用协程处理并发问题的时候,我们的思路其实可以更宽。比如,我们可以使用**单线程并发**。
|
|
|
|
|
|
### 单线程并发
|
|
|
|
|
|
在Kotlin当中,单线程并发的实现其实非常轻松。不过如果你有Java经验的话,也许会对这个说法产生疑问,因为在Java当中,并发往往就意味着多线程。
|
|
|
|
|
|
实际上,在[第16讲](https://time.geekbang.org/column/article/487930)里我们就涉及到“单线程并发”这个概念了。让我们回过头,重新看看那段并发的代码。
|
|
|
|
|
|
```plain
|
|
|
// 代码段5
|
|
|
fun main() = runBlocking {
|
|
|
suspend fun getResult1(): String {
|
|
|
logX("Start getResult1")
|
|
|
delay(1000L) // 模拟耗时操作
|
|
|
logX("End getResult1")
|
|
|
return "Result1"
|
|
|
}
|
|
|
|
|
|
suspend fun getResult2(): String {
|
|
|
logX("Start getResult2")
|
|
|
delay(1000L) // 模拟耗时操作
|
|
|
logX("End getResult2")
|
|
|
return "Result2"
|
|
|
}
|
|
|
|
|
|
suspend fun getResult3(): String {
|
|
|
logX("Start getResult3")
|
|
|
delay(1000L) // 模拟耗时操作
|
|
|
logX("End getResult3")
|
|
|
return "Result3"
|
|
|
}
|
|
|
|
|
|
val results: List<String>
|
|
|
|
|
|
val time = measureTimeMillis {
|
|
|
val result1 = async { getResult1() }
|
|
|
val result2 = async { getResult2() }
|
|
|
val result3 = async { getResult3() }
|
|
|
|
|
|
results = listOf(result1.await(), result2.await(), result3.await())
|
|
|
}
|
|
|
|
|
|
println("Time: $time")
|
|
|
println(results)
|
|
|
}
|
|
|
|
|
|
/*
|
|
|
输出结果
|
|
|
================================
|
|
|
Start getResult1
|
|
|
Thread:main
|
|
|
================================
|
|
|
================================
|
|
|
Start getResult2
|
|
|
Thread:main
|
|
|
================================
|
|
|
================================
|
|
|
Start getResult3
|
|
|
Thread:main
|
|
|
================================
|
|
|
================================
|
|
|
End getResult1
|
|
|
Thread:main
|
|
|
================================
|
|
|
================================
|
|
|
End getResult2
|
|
|
Thread:main
|
|
|
================================
|
|
|
================================
|
|
|
End getResult3
|
|
|
Thread:main
|
|
|
================================
|
|
|
Time: 1066
|
|
|
[Result1, Result2, Result3]
|
|
|
*/
|
|
|
|
|
|
```
|
|
|
|
|
|
在上面的代码中启动了三个协程,它们之间是并发执行的,每个协程执行耗时是1000毫秒,程序总耗时也是接近1000毫秒。而且,这几个协程是运行在同一个线程main之上的。
|
|
|
|
|
|
所以,当我们在协程中面临并发问题的时候,首先可以考虑:**是否真的需要多线程**?如果不需要的话,其实是可以不考虑多线程同步问题的。
|
|
|
|
|
|
那么,对于前面代码段2的例子来说,我们则可以把计算的逻辑分发到单一的线程之上。
|
|
|
|
|
|
```plain
|
|
|
// 代码段6
|
|
|
fun main() = runBlocking {
|
|
|
val mySingleDispatcher = Executors.newSingleThreadExecutor {
|
|
|
Thread(it, "MySingleThread").apply { isDaemon = true }
|
|
|
}.asCoroutineDispatcher()
|
|
|
|
|
|
var i = 0
|
|
|
val jobs = mutableListOf<Job>()
|
|
|
|
|
|
repeat(10) {
|
|
|
val job = launch(mySingleDispatcher) {
|
|
|
repeat(1000) {
|
|
|
i++
|
|
|
}
|
|
|
}
|
|
|
jobs.add(job)
|
|
|
}
|
|
|
|
|
|
jobs.joinAll()
|
|
|
|
|
|
println("i = $i")
|
|
|
}
|
|
|
|
|
|
/*
|
|
|
输出结果
|
|
|
i = 10000
|
|
|
*/
|
|
|
|
|
|
```
|
|
|
|
|
|
可见,在这段代码中,我们使用“launch(mySingleDispatcher)”,把所有的协程任务都分发到了单线程的Dispatcher当中,这样一来,我们就不必担心同步问题了。另外,如果仔细分析的话,上面创建的10个协程之间,其实仍然是并发执行的。
|
|
|
|
|
|
所以这时候,如果你运行上面的代码,就一定可以得到正确的结果了:i = 10000。
|
|
|
|
|
|
### Mutex
|
|
|
|
|
|
在Java当中,其实还有Lock之类的同步锁。但由于Java的锁是阻塞式的,会大大影响协程的非阻塞式的特性。所以,在Kotlin协程当中,我们也是**不推荐**直接使用传统的同步锁的,甚至在某些场景下,在协程中使用Java的锁也会遇到意想不到的问题。
|
|
|
|
|
|
为此,Kotlin官方提供了“非阻塞式”的锁:Mutex。下面我们就来看看,如何用Mutex来改造代码段2。
|
|
|
|
|
|
```plain
|
|
|
// 代码段7
|
|
|
|
|
|
fun main() = runBlocking {
|
|
|
val mutex = Mutex()
|
|
|
|
|
|
var i = 0
|
|
|
val jobs = mutableListOf<Job>()
|
|
|
|
|
|
repeat(10) {
|
|
|
val job = launch(Dispatchers.Default) {
|
|
|
repeat(1000) {
|
|
|
// 变化在这里
|
|
|
mutex.lock()
|
|
|
i++
|
|
|
mutex.unlock()
|
|
|
}
|
|
|
}
|
|
|
jobs.add(job)
|
|
|
}
|
|
|
|
|
|
jobs.joinAll()
|
|
|
|
|
|
println("i = $i")
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
在上面的代码中,我们使用mutex.lock()、mutex.unlock()包裹了需要同步的计算逻辑,这样一来,代码就可以实现多线程同步了,程序的输出结果也会是10000。
|
|
|
|
|
|
实际上,Mutex对比JDK当中的锁,最大的优势就在于**支持挂起和恢复**。让我们来看看它的源码定义:
|
|
|
|
|
|
```plain
|
|
|
// 代码段8
|
|
|
public interface Mutex {
|
|
|
public val isLocked: Boolean
|
|
|
|
|
|
// 注意这里
|
|
|
// ↓
|
|
|
public suspend fun lock(owner: Any? = null)
|
|
|
|
|
|
public fun unlock(owner: Any? = null)
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
可以看到,Mutex是一个接口,它的lock()方法其实是一个挂起函数。而这就是实现非阻塞式同步锁的根本原因。
|
|
|
|
|
|
不过,在代码段7当中,我们对于Mutex的使用其实是**错误**的。因为这样的做法并不安全,我们可以来看一个场景:
|
|
|
|
|
|
```plain
|
|
|
// 代码段9
|
|
|
fun main() = runBlocking {
|
|
|
val mutex = Mutex()
|
|
|
|
|
|
var i = 0
|
|
|
val jobs = mutableListOf<Job>()
|
|
|
|
|
|
repeat(10) {
|
|
|
val job = launch(Dispatchers.Default) {
|
|
|
repeat(1000) {
|
|
|
try {
|
|
|
mutex.lock()
|
|
|
i++
|
|
|
i/0 // 故意制造异常
|
|
|
mutex.unlock()
|
|
|
} catch (e: Exception) {
|
|
|
println(e)
|
|
|
}
|
|
|
}
|
|
|
}
|
|
|
jobs.add(job)
|
|
|
}
|
|
|
|
|
|
jobs.joinAll()
|
|
|
|
|
|
println("i = $i")
|
|
|
}
|
|
|
|
|
|
// 程序无法退出
|
|
|
|
|
|
```
|
|
|
|
|
|
以上代码会在mutex.lock()、mutex.unlock()之间发生异常,从而导致mutex.unlock()无法被调用。这个时候,整个程序的执行流程就会一直卡住,无法结束。
|
|
|
|
|
|
所以,为了避免出现这样的问题,我们应该使用Kotlin提供的一个扩展函数:**mutex.withLock{}**。
|
|
|
|
|
|
```plain
|
|
|
// 代码段10
|
|
|
fun main() = runBlocking {
|
|
|
val mutex = Mutex()
|
|
|
|
|
|
var i = 0
|
|
|
val jobs = mutableListOf<Job>()
|
|
|
|
|
|
repeat(10) {
|
|
|
val job = launch(Dispatchers.Default) {
|
|
|
repeat(1000) {
|
|
|
// 变化在这里
|
|
|
mutex.withLock {
|
|
|
i++
|
|
|
}
|
|
|
}
|
|
|
}
|
|
|
jobs.add(job)
|
|
|
}
|
|
|
|
|
|
jobs.joinAll()
|
|
|
|
|
|
println("i = $i")
|
|
|
}
|
|
|
|
|
|
// withLock的定义
|
|
|
public suspend inline fun <T> Mutex.withLock(owner: Any? = null, action: () -> T): T {
|
|
|
lock(owner)
|
|
|
try {
|
|
|
return action()
|
|
|
} finally {
|
|
|
unlock(owner)
|
|
|
}
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
可以看到,withLock{} 的本质,其实是在finally{} 当中调用了unlock()。这样一来,我们就再也不必担心因为异常导致unlock()无法执行的问题了。
|
|
|
|
|
|
### Actor
|
|
|
|
|
|
Actor,其实是在很多编程语言当中都存在的一个并发同步模型。在Kotlin当中,也同样存在这样的模型,它本质上是**基于Channel管道消息实现**的。下面我们还是来看一个例子:
|
|
|
|
|
|
```plain
|
|
|
// 代码段11
|
|
|
|
|
|
sealed class Msg
|
|
|
object AddMsg : Msg()
|
|
|
|
|
|
class ResultMsg(
|
|
|
val result: CompletableDeferred<Int>
|
|
|
) : Msg()
|
|
|
|
|
|
fun main() = runBlocking {
|
|
|
|
|
|
suspend fun addActor() = actor<Msg> {
|
|
|
var counter = 0
|
|
|
for (msg in channel) {
|
|
|
when (msg) {
|
|
|
is AddMsg -> counter++
|
|
|
is ResultMsg -> msg.result.complete(counter)
|
|
|
}
|
|
|
}
|
|
|
}
|
|
|
|
|
|
val actor = addActor()
|
|
|
val jobs = mutableListOf<Job>()
|
|
|
|
|
|
repeat(10) {
|
|
|
val job = launch(Dispatchers.Default) {
|
|
|
repeat(1000) {
|
|
|
actor.send(AddMsg)
|
|
|
}
|
|
|
}
|
|
|
jobs.add(job)
|
|
|
}
|
|
|
|
|
|
jobs.joinAll()
|
|
|
|
|
|
val deferred = CompletableDeferred<Int>()
|
|
|
actor.send(ResultMsg(deferred))
|
|
|
|
|
|
val result = deferred.await()
|
|
|
actor.close()
|
|
|
|
|
|
println("i = ${result}")
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
在这段代码中,我们定义了addActor()这个挂起函数,而它其实调用了actor()这个高阶函数。而这个函数的返回值类型其实是SendChannel。由此可见,**Kotlin当中的Actor其实就是Channel的简单封装。**Actor的多线程同步能力都源自于Channel。
|
|
|
|
|
|
这里,我们借助**密封类**定义了两种消息类型,AddMsg、ResultMsg,然后在 **actor{} 内部**,我们处理这两种消息类型,如果我们收到了AddMsg,则计算“i++”;如果收到了ResultMsg,则返回计算结果。
|
|
|
|
|
|
而在 **actor{} 的外部**,我们则只需要发送10000次的AddMsg消息,最后再发送一次ResultMsg,取回计算结果即可。
|
|
|
|
|
|
由于Actor的结构比较抽象,这里我做了一个小视频,帮你更好地理解它。
|
|
|
|
|
|
需要注意的是,虽然在上面的演示视频中,AddMsg、ResultMsg是串行发送的,但实际上,它们是在多线程并行发送的,而Channel可以保证接收到的消息可以同步接收并处理。
|
|
|
|
|
|
这也就证明了我们前面的说法:Actor本质上是基于Channel管道消息实现的。
|
|
|
|
|
|
> 补充:Kotlin目前的Actor实现其实还比较简陋,在不远的将来,Kotlin官方会对Actor API进行重构,具体可以参考这个[链接](https://github.com/Kotlin/kotlinx.coroutines/issues/87)。虽然它的API可能会改变,但我相信它的核心理念是不会变的。
|
|
|
|
|
|
好,到现在为止,我们已经学习了三种协程并发的思路。不过我们还要反思一个问题:**多线程并发,一定需要同步机制吗?**
|
|
|
|
|
|
## 反思:可变状态
|
|
|
|
|
|
前面我们提到过,多线程并发,往往会有共享的可变状态,而共享可变状态的时候,就需要考虑同步问题。
|
|
|
|
|
|
弄清楚这一点后,我们其实会找到一个新的思路:**避免共享可变状态**。有了这个思路以后,我们的代码其实就非常容易实现了:
|
|
|
|
|
|
```plain
|
|
|
// 代码段12
|
|
|
|
|
|
fun main() = runBlocking {
|
|
|
val deferreds = mutableListOf<Deferred<Int>>()
|
|
|
|
|
|
repeat(10) {
|
|
|
val deferred = async (Dispatchers.Default) {
|
|
|
var i = 0
|
|
|
repeat(1000) {
|
|
|
i++
|
|
|
}
|
|
|
return@async i
|
|
|
}
|
|
|
deferreds.add(deferred)
|
|
|
}
|
|
|
|
|
|
var result = 0
|
|
|
deferreds.forEach {
|
|
|
result += it.await()
|
|
|
}
|
|
|
|
|
|
println("i = $result")
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
在上面的代码中,我们不再共享可变状态i,对应的,在每一个协程当中,都有一个局部的变量i,同时将launch都改为了async,让每一个协程都可以返回计算结果。
|
|
|
|
|
|
这种方式,相当于将10000次计算,平均分配给了10个协程,让它们各自计算1000次。这样一来,每个协程都可以进行独立的计算,然后我们将10个协程的结果汇总起来,最后累加在一起。
|
|
|
|
|
|
其实,我们上面的思路,也是借鉴自函数式编程的思想,因为在函数式编程当中,就是追求**不变性、无副作用**。不过,以上代码其实还是命令式的代码,如果我们用函数式风格来重构的话,代码会更加简洁。
|
|
|
|
|
|
```plain
|
|
|
// 代码段13
|
|
|
|
|
|
fun main() = runBlocking {
|
|
|
val result = (1..10).map {
|
|
|
async (Dispatchers.Default) {
|
|
|
var i = 0
|
|
|
repeat(1000) {
|
|
|
i++
|
|
|
}
|
|
|
return@async i
|
|
|
}
|
|
|
}.awaitAll()
|
|
|
.sum()
|
|
|
|
|
|
println("i = $result")
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
上面的代码中,我们使用函数式风格代码重构了代码段12,我们仍然创建了10个协程,并发了计算了10000次自增操作。
|
|
|
|
|
|
在加餐一当中,我曾提到过,函数式编程的一大优势就在于,它具有不变性、无副作用的特点,所以**无惧并发编程**。上面的这个代码案例,其实就体现出了Kotlin函数式编程的这个优势。
|
|
|
|
|
|
## 小结
|
|
|
|
|
|
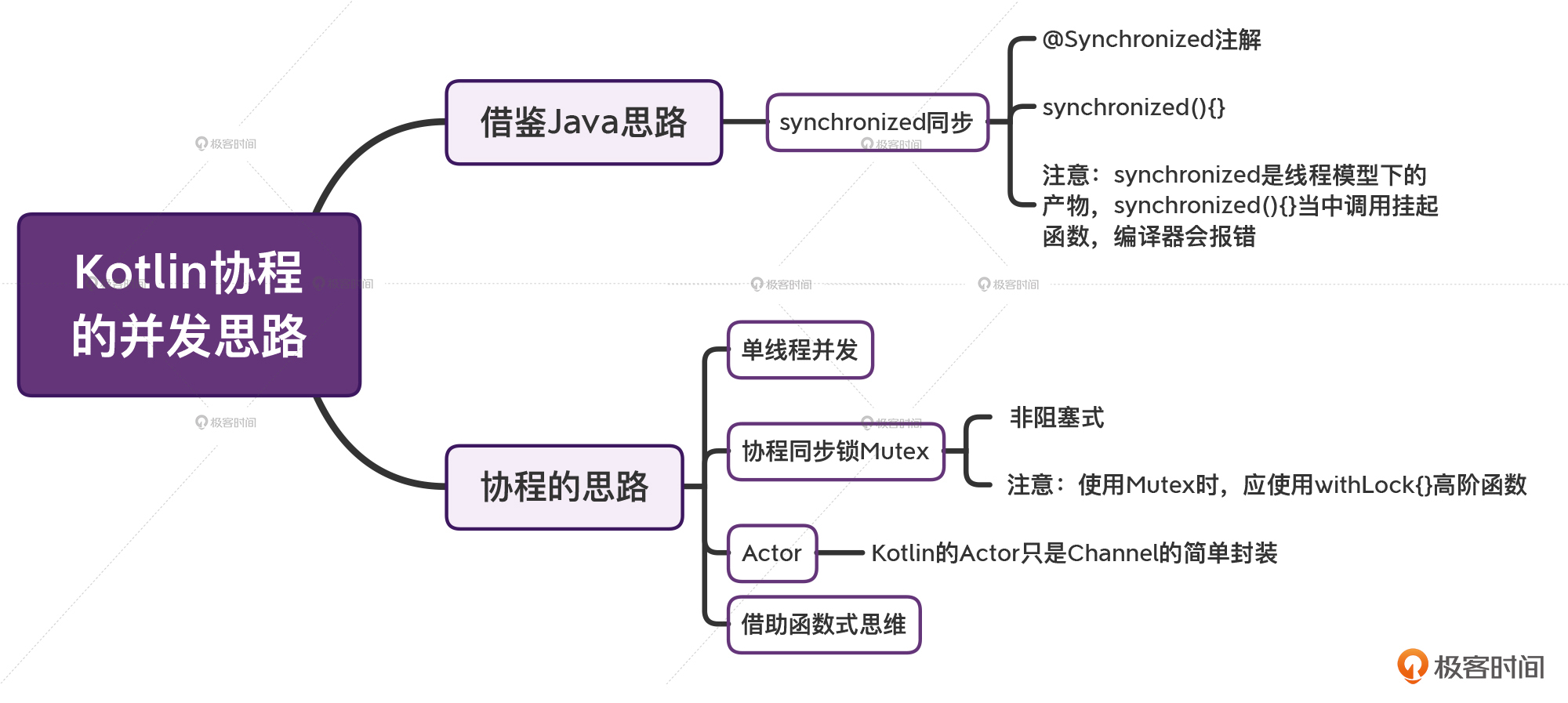
这节课,我们学习了Kotlin协程解决并发的两大思路,分别是Java思路、协程思路。要注意,对于Java当中的同步手段,我们并不能直接照搬到Kotlin协程当中来,其中最大的问题,就是 **synchronized不支持挂起函数。**
|
|
|
|
|
|
而对于协程并发手段,我也给你介绍了4种手段,这些你都需要掌握好。
|
|
|
|
|
|
* 第一种手段,**单线程并发**,在Java世界里,并发往往意味着多线程,但在Kotlin协程当中,我们可以轻松实现单线程并发,这时候我们就不用担心多线程同步的问题了。
|
|
|
* 第二种手段,Kotlin官方提供的协程同步锁,**Mutex**,由于它的lock方法是挂起函数,所以它跟JDK当中的锁不一样,Mutex是非阻塞的。需要注意的是,我们在使用Mutex的时候,应该使用withLock{} 这个高阶函数,而不是直接使用lock()、unlock()。
|
|
|
* 第三种手段,Kotlin官方提供的**Actor**,这是一种普遍存在的并发模型。在目前的版本当中,Kotlin的Actor只是Channel的简单封装,它的API会在未来的版本发生改变。
|
|
|
* 第四种手段,借助**函数式思维**。我们之所以需要处理多线程同步问题,主要还是因为存在**共享的可变状态**。其实,共享可变状态,既不符合**无副作用**的特性,也不符合**不变性**的特性。当我们借助函数式编程思维,实现无副作用和不变性以后,并发代码也会随之变得安全。
|
|
|
|
|
|
|
|
|
|
|
|
## 思考题
|
|
|
|
|
|
Kotlin提供的Mutex,它会比JDK的锁性能更好吗?为什么?欢迎在留言区分享你的答案,也欢迎你把今天的内容分享给更多的朋友。
|
|
|
|