245 lines
18 KiB
Markdown
245 lines
18 KiB
Markdown
# 17 | 性能及稳定性(下):如何优化及扩展etcd性能?
|
||
|
||
你好,我是唐聪。
|
||
|
||
我们继续来看如何优化及扩展etcd性能。上一节课里我为你重点讲述了如何提升读的性能,今天我将重点为你介绍如何提升写性能和稳定性,以及如何基于etcd gRPC Proxy扩展etcd性能。
|
||
|
||
当你使用etcd写入大量key-value数据的时候,是否遇到过etcd server返回"etcdserver: too many requests"错误?这个错误是怎么产生的呢?我们又该如何来优化写性能呢?
|
||
|
||
这节课我将通过写性能分析链路图,为你从上至下分析影响写性能、稳定性的若干因素,并为你总结出若干etcd写性能优化和扩展方法。
|
||
|
||
## 性能分析链路
|
||
|
||
为什么你写入大量key-value数据的时候,会遇到Too Many Request限速错误呢? 是写流程中的哪些环节出现了瓶颈?
|
||
|
||
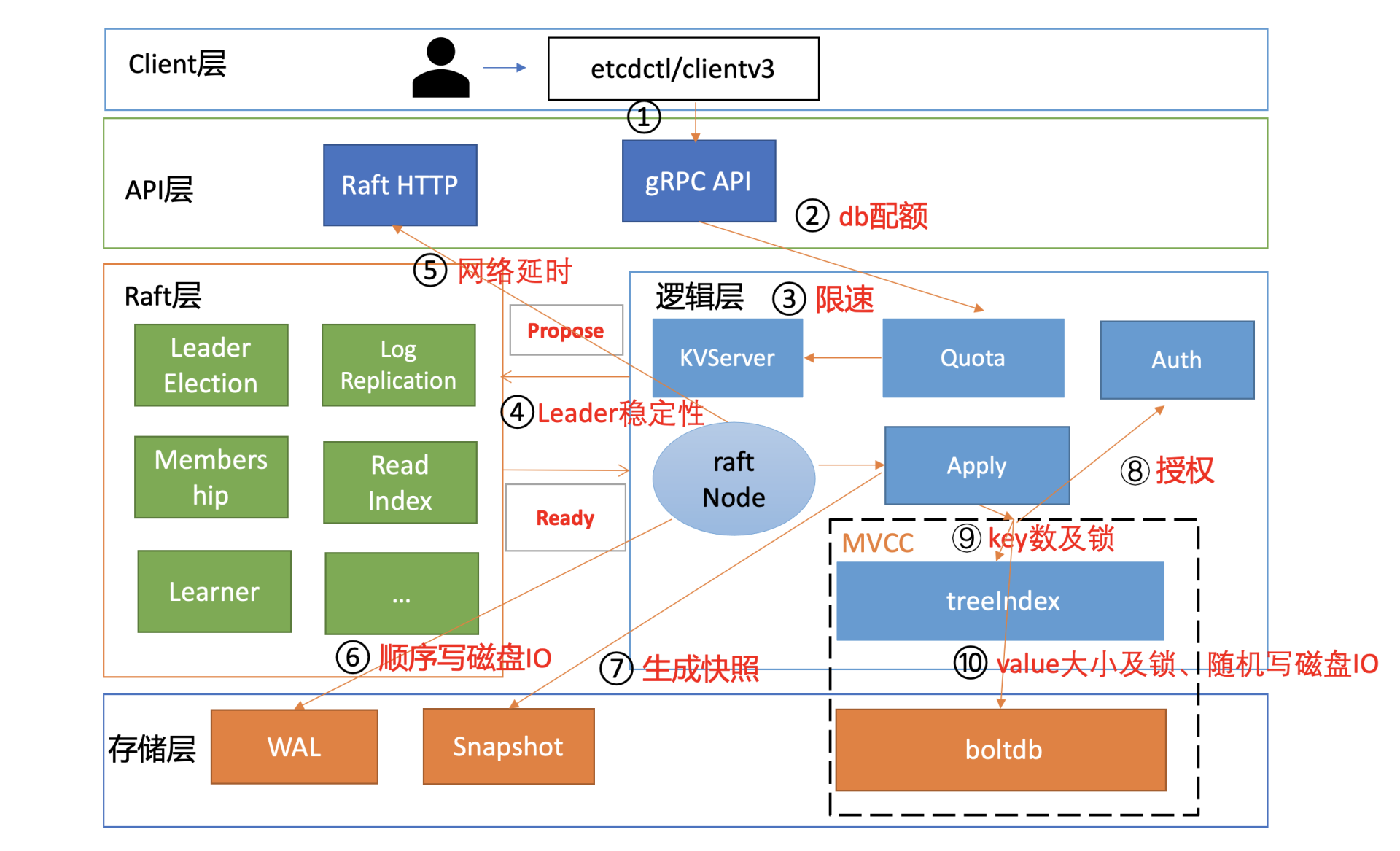
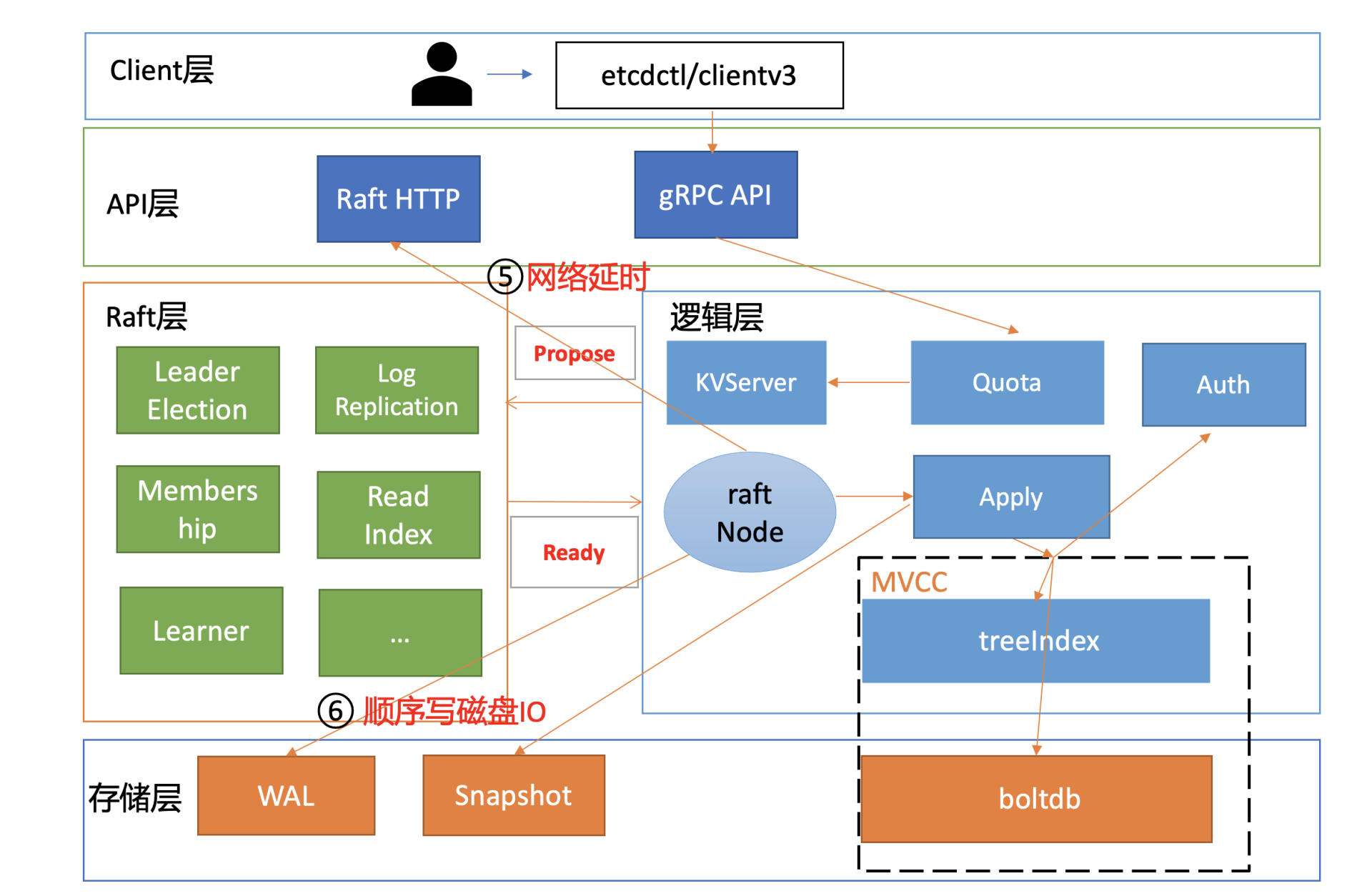
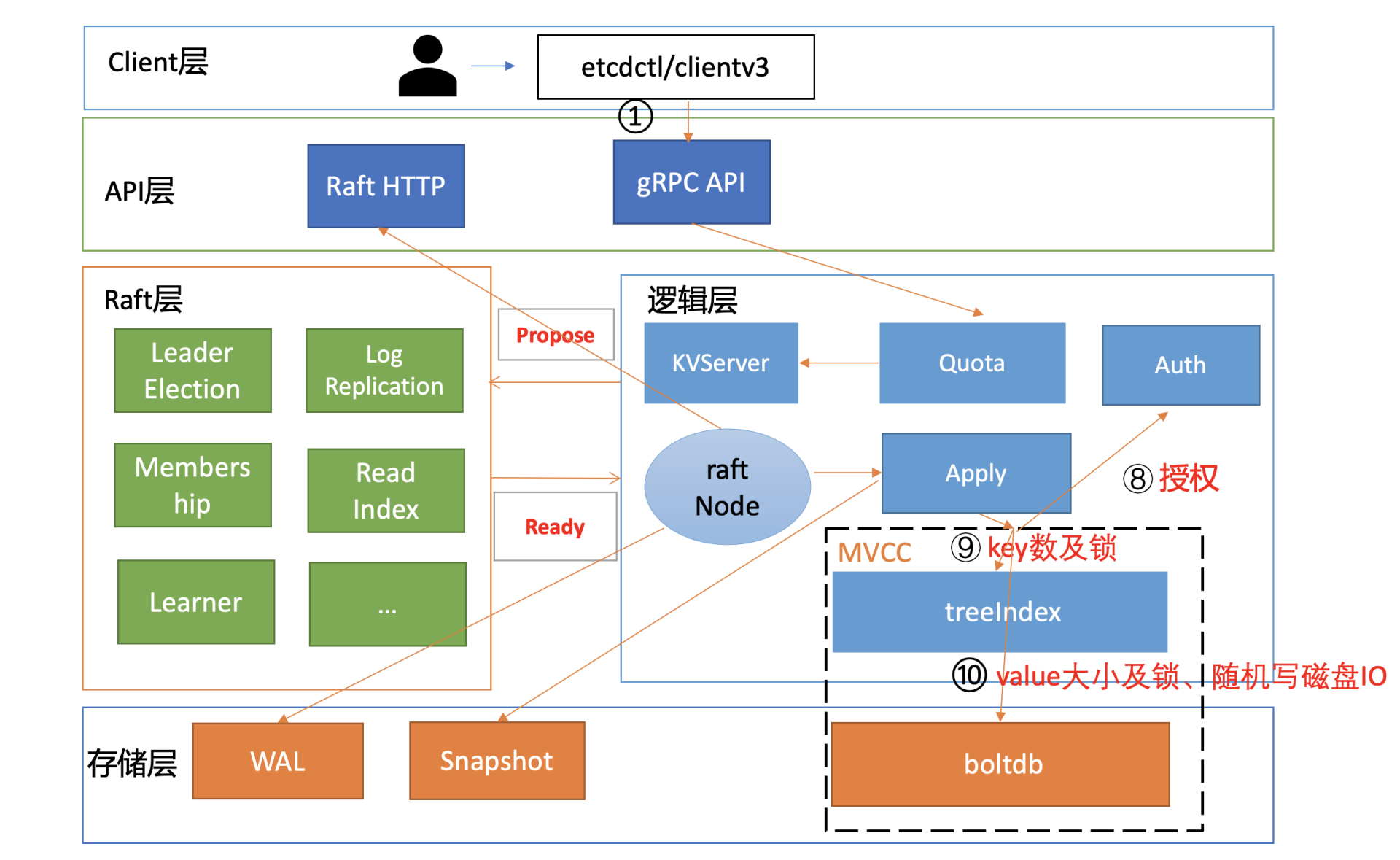
和读请求类似,我为你总结了一个开启鉴权场景的写性能瓶颈及稳定性分析链路图,并在每个核心步骤数字旁边标识了影响性能、稳定性的关键因素。
|
||
|
||
|
||
|
||
下面我将按照这个写请求链路分析图,和你深入分析影响etcd写性能的核心因素和最佳优化实践。
|
||
|
||
## db quota
|
||
|
||
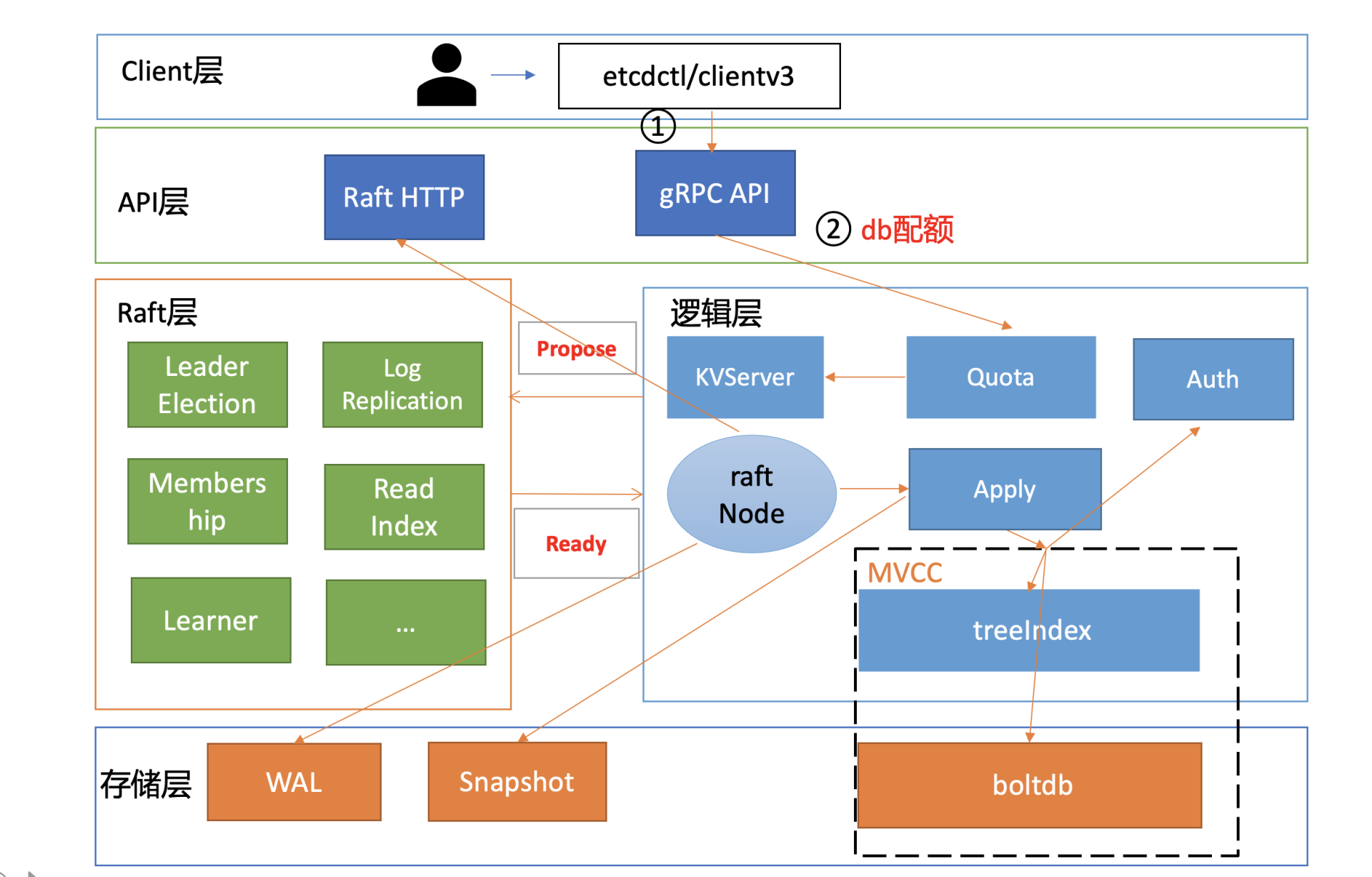
首先是流程一。在etcd v3.4.9版本中,client会通过clientv3库的Round-robin负载均衡算法,从endpoint列表中轮询选择一个endpoint访问,发起gRPC调用。
|
||
|
||
然后进入流程二。etcd收到gRPC写请求后,首先经过的是Quota模块,它会影响写请求的稳定性,若db大小超过配额就无法写入。
|
||
|
||
|
||
|
||
etcd是个小型的元数据存储,默认db quota大小是2G,超过2G就只读无法写入。因此你需要根据你的业务场景,适当调整db quota大小,并配置的合适的压缩策略。
|
||
|
||
正如我在[11](https://time.geekbang.org/column/article/342891)里和你介绍的,etcd支持按时间周期性压缩、按版本号压缩两种策略,建议压缩策略不要配置得过于频繁。比如如果按时间周期压缩,一般情况下5分钟以上压缩一次比较合适,因为压缩过程中会加一系列锁和删除boltdb数据,过于频繁的压缩会对性能有一定的影响。
|
||
|
||
一般情况下db大小尽量不要超过8G,过大的db文件和数据量对集群稳定性各方面都会有一定的影响,详细你可以参考[13](https://time.geekbang.org/column/article/343245)。
|
||
|
||
## 限速
|
||
|
||
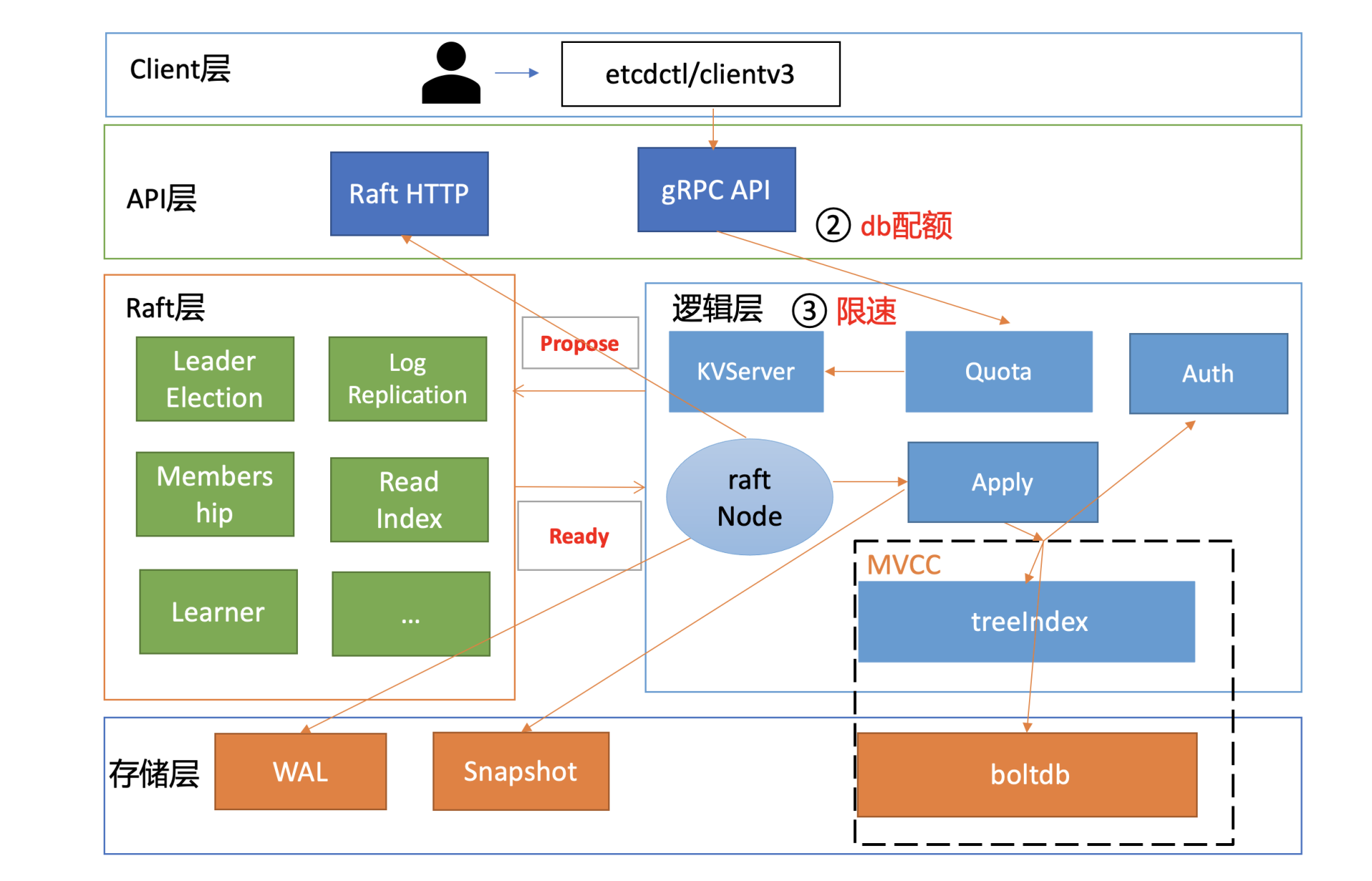
通过流程二的Quota模块后,请求就进入流程三KVServer模块。在KVServer模块里,影响写性能的核心因素是限速。
|
||
|
||
|
||
|
||
KVServer模块的写请求在提交到Raft模块前,会进行限速判断。如果Raft模块已提交的日志索引(committed index)比已应用到状态机的日志索引(applied index)超过了5000,那么它就返回一个"etcdserver: too many requests"错误给client。
|
||
|
||
那么哪些情况可能会导致committed Index远大于applied index呢?
|
||
|
||
首先是long expensive read request导致写阻塞。比如etcd 3.4版本之前长读事务会持有较长时间的buffer读锁,而写事务又需要升级锁更新buffer,因此出现写阻塞乃至超时。最终导致etcd server应用已提交的Raft日志命令到状态机缓慢。堆积过多时,则会触发限速。
|
||
|
||
其次etcd定时批量将boltdb写事务提交的时候,需要对B+ tree进行重平衡、分裂,并将freelist、dirty page、meta page持久化到磁盘。此过程需要持有boltdb事务锁,若磁盘随机写性能较差、瞬间大量写入,则也容易写阻塞,应用已提交的日志条目缓慢。
|
||
|
||
最后执行defrag等运维操作时,也会导致写阻塞,它们会持有相关锁,导致写性能下降。
|
||
|
||
## 心跳及选举参数优化
|
||
|
||
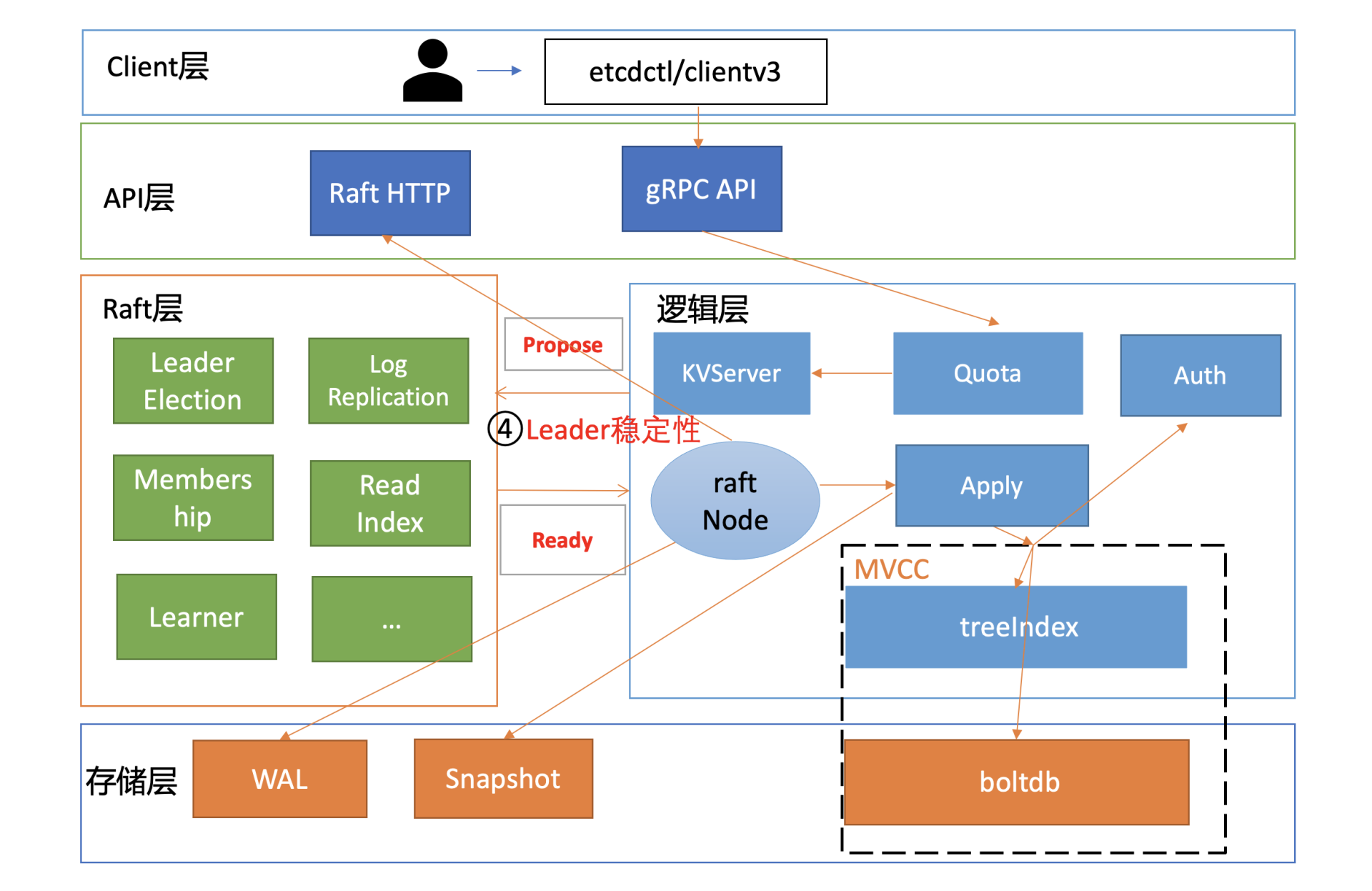
写请求经过KVServer模块后,则会提交到流程四的Raft模块。我们知道etcd写请求需要转发给Leader处理,因此影响此模块性能和稳定性的核心因素之一是集群Leader的稳定性。
|
||
|
||
|
||
|
||
那如何判断Leader的稳定性呢?
|
||
|
||
答案是日志和metrics。
|
||
|
||
一方面,在你使用etcd过程中,你很可能见过如下Leader发送心跳超时的警告日志,你可以通过此日志判断集群是否有频繁切换Leader的风险。
|
||
|
||
另一方面,你可以通过etcd\_server\_leader\_changes\_seen\_total metrics来观察已发生Leader切换的次数。
|
||
|
||
```
|
||
21:30:27 etcd3 | {"level":"warn","ts":"2021-02-23T21:30:27.255+0800","caller":"wal/wal.go:782","msg":"slow fdatasync","took":"3.259857956s","expected-duration":"1s"}
|
||
21:30:30 etcd3 | {"level":"warn","ts":"2021-02-23T21:30:30.396+0800","caller":"etcdserver/raft.go:390","msg":"leader failed to send out heartbeat on time; took too long, leader is overloaded likely from slow disk","to":"91bc3c398fb3c146","heartbeat-interval":"100ms","expected-duration":"200ms","exceeded-duration":"827.162111ms"}
|
||
|
||
```
|
||
|
||
那么哪些因素会导致此日志产生以及发生Leader切换呢?
|
||
|
||
首先,我们知道etcd是基于Raft协议实现数据复制和高可用的,各节点会选出一个Leader,然后Leader将写请求同步给各个Follower节点。而Follower节点如何感知Leader异常,发起选举,正是依赖Leader的心跳机制。
|
||
|
||
在etcd中,Leader节点会根据heartbeart-interval参数(默认100ms)定时向Follower节点发送心跳。如果两次发送心跳间隔超过2\*heartbeart-interval,就会打印此警告日志。超过election timeout(默认1000ms),Follower节点就会发起新一轮的Leader选举。
|
||
|
||
哪些原因会导致心跳超时呢?
|
||
|
||
一方面可能是你的磁盘IO比较慢。因为etcd从Raft的Ready结构获取到相关待提交日志条目后,它需要将此消息写入到WAL日志中持久化。你可以通过观察etcd\_wal\_fsync\_durations\_seconds\_bucket指标来确定写WAL日志的延时。若延时较大,你可以使用SSD硬盘解决。
|
||
|
||
另一方面也可能是CPU使用率过高和网络延时过大导致。CPU使用率较高可能导致发送心跳的goroutine出现饥饿。若etcd集群跨地域部署,节点之间RTT延时大,也可能会导致此问题。
|
||
|
||
最后我们应该如何调整心跳相关参数,以避免频繁Leader选举呢?
|
||
|
||
etcd默认心跳间隔是100ms,较小的心跳间隔会导致发送频繁的消息,消耗CPU和网络资源。而较大的心跳间隔,又会导致检测到Leader故障不可用耗时过长,影响业务可用性。一般情况下,为了避免频繁Leader切换,建议你可以根据实际部署环境、业务场景,将心跳间隔时间调整到100ms到400ms左右,选举超时时间要求至少是心跳间隔的10倍。
|
||
|
||
## 网络和磁盘IO延时
|
||
|
||
当集群Leader稳定后,就可以进入Raft日志同步流程。
|
||
|
||
我们假设收到写请求的节点就是Leader,写请求通过Propose接口提交到Raft模块后,Raft模块会输出一系列消息。
|
||
|
||
etcd server的raftNode goroutine通过Raft模块的输出接口Ready,获取到待发送给Follower的日志条目追加消息和待持久化的日志条目。
|
||
|
||
raftNode goroutine首先通过HTTP协议将日志条目追加消息广播给各个Follower节点,也就是流程五。
|
||
|
||
|
||
|
||
流程五涉及到各个节点之间网络通信,因此节点之间RTT延时对其性能有较大影响。跨可用区、跨地域部署时性能会出现一定程度下降,建议你结合实际网络环境使用benchmark工具测试一下。etcd Raft网络模块在实现上,也会通过流式发送和pipeline等技术优化来降低延时、提高网络性能。
|
||
|
||
同时,raftNode goroutine也会将待持久化的日志条目追加到WAL中,它可以防止进程crash后数据丢失,也就是流程六。注意此过程需要同步等待数据落地,因此磁盘顺序写性能决定着性能优异。
|
||
|
||
为了提升写吞吐量,etcd会将一批日志条目批量持久化到磁盘。etcd是个对磁盘IO延时非常敏感的服务,如果服务对性能、稳定性有较大要求,建议你使用SSD盘。
|
||
|
||
那使用SSD盘的etcd集群和非SSD盘的etcd集群写性能差异有多大呢?
|
||
|
||
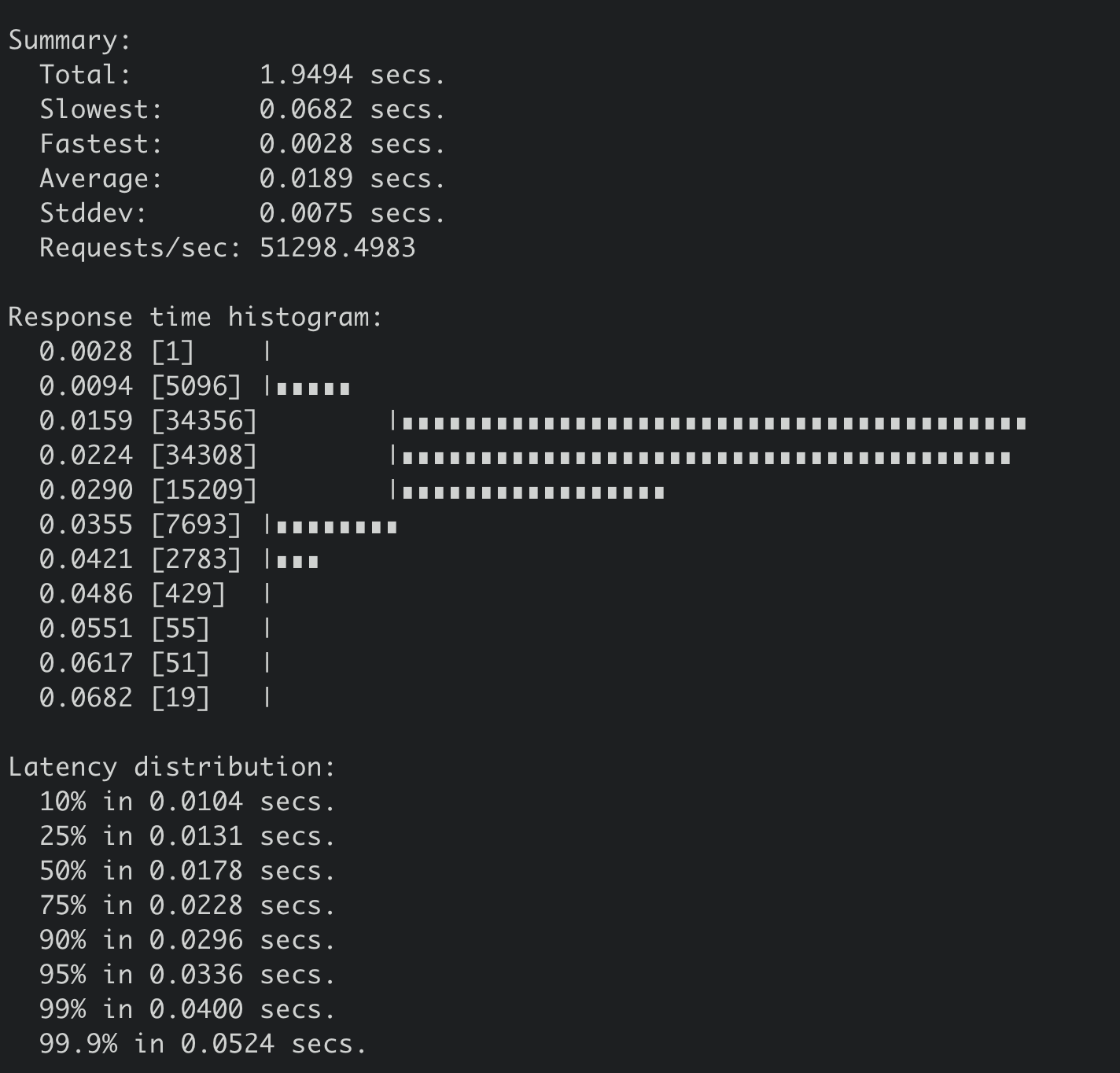
下面是SSD盘集群,执行如下benchmark命令的压测结果,写QPS 51298,平均延时189ms。
|
||
|
||
```
|
||
benchmark --endpoints=addr --conns=100 --clients=1000 \
|
||
put --key-size=8 --sequential-keys --total=10000000 --
|
||
val-size=256
|
||
|
||
```
|
||
|
||
|
||
|
||
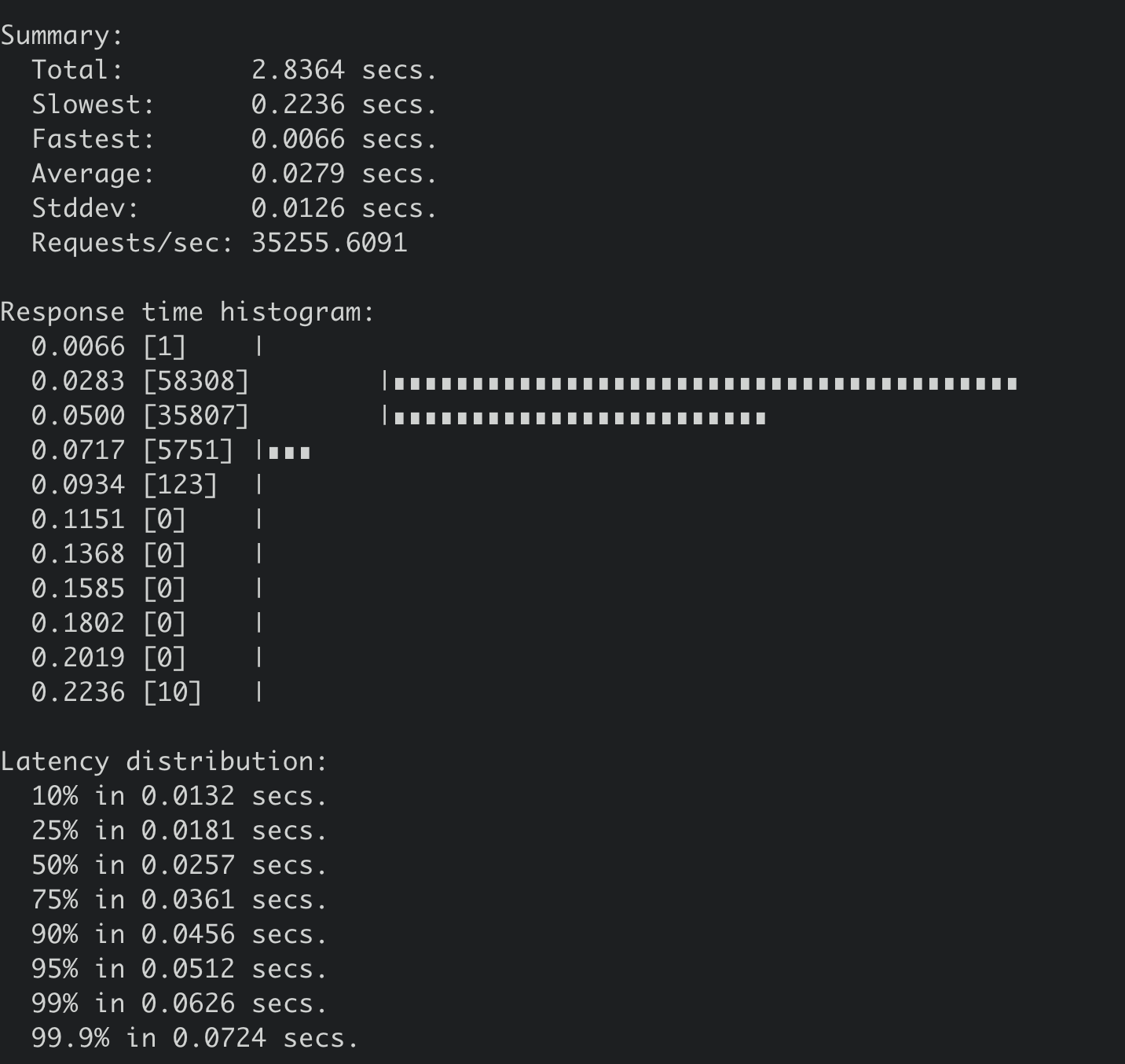
下面是非SSD盘集群,执行同样benchmark命令的压测结果,写QPS 35255,平均延时279ms。
|
||
|
||
|
||
|
||
## 快照参数优化
|
||
|
||
在Raft模块中,正常情况下,Leader可快速地将我们的key-value写请求同步给其他Follower节点。但是某Follower节点若数据落后太多,Leader内存中的Raft日志已经被compact了,那么Leader只能发送一个快照给Follower节点重建恢复。
|
||
|
||
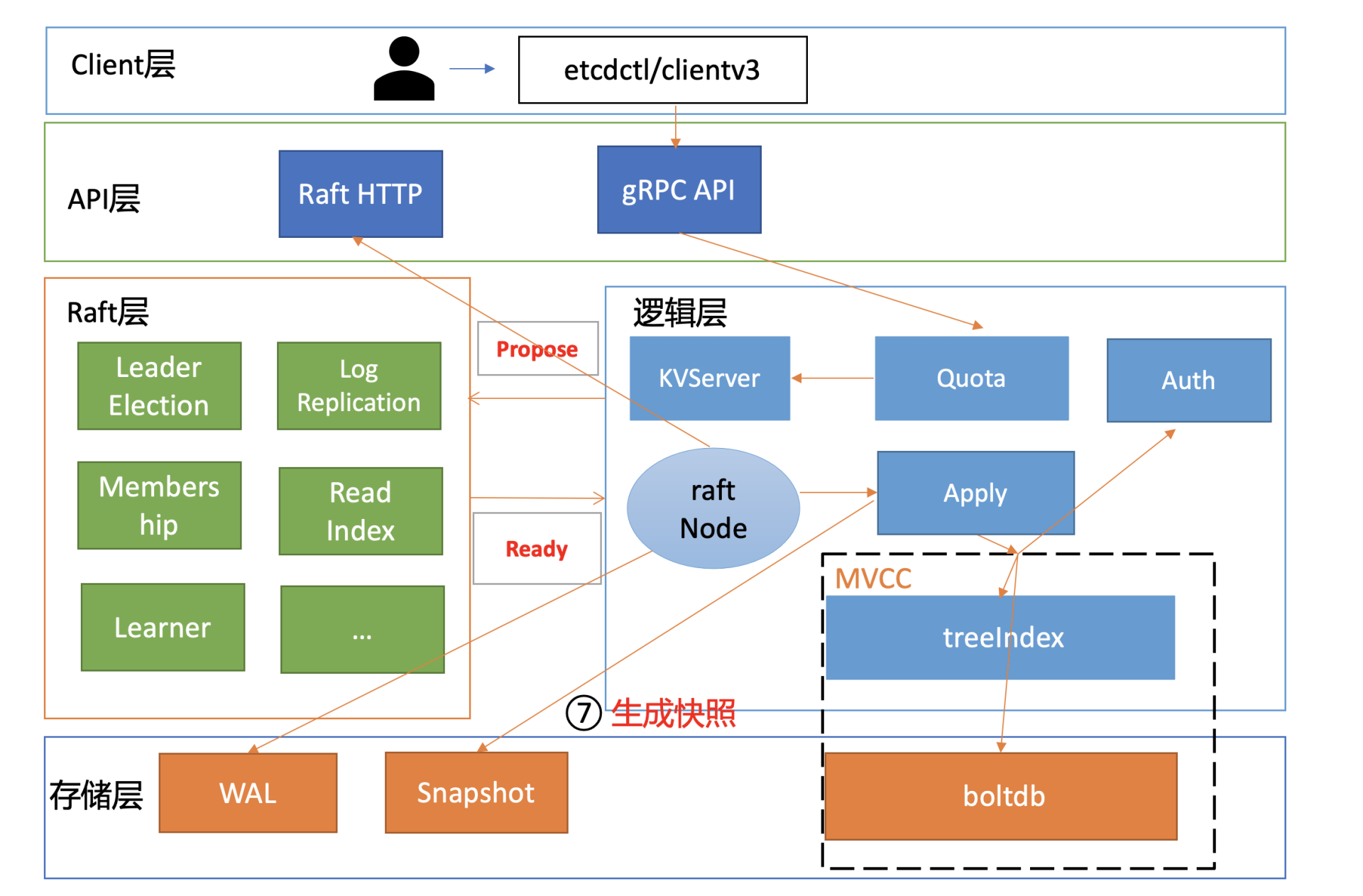
在快照较大的时候,发送快照可能会消耗大量的CPU、Memory、网络资源,那么它就会影响我们的读写性能,也就是我们图中的流程七。
|
||
|
||
|
||
|
||
一方面, etcd Raft模块引入了流控机制,来解决日志同步过程中可能出现的大量资源开销、导致集群不稳定的问题。
|
||
|
||
另一方面,我们可以通过快照参数优化,去降低Follower节点通过Leader快照重建的概率,使其尽量能通过增量的日志同步保持集群的一致性。
|
||
|
||
etcd提供了一个名为--snapshot-count的参数来控制快照行为。它是指收到多少个写请求后就触发生成一次快照,并对Raft日志条目进行压缩。为了帮助slower Follower赶上Leader进度,etcd在生成快照,压缩日志条目的时候也会至少保留5000条日志条目在内存中。
|
||
|
||
那snapshot-count参数设置多少合适呢?
|
||
|
||
snapshot-count值过大它会消耗较多内存,你可以参考15内存篇中Raft日志内存占用分析。过小则的话在某节点数据落后时,如果它请求同步的日志条目Leader已经压缩了,此时我们就不得不将整个db文件发送给落后节点,然后进行快照重建。
|
||
|
||
快照重建是极其昂贵的操作,对服务质量有较大影响,因此我们需要尽量避免快照重建。etcd 3.2版本之前snapshot-count参数值是1万,比较低,短时间内大量写入就较容易触发慢的Follower节点快照重建流程。etcd 3.2版本后将其默认值调大到10万,老版本升级的时候,你需要注意配置文件是否写死固定的参数值。
|
||
|
||
## 大value
|
||
|
||
当写请求对应的日志条目被集群多数节点确认后,就可以提交到状态机执行了。etcd的raftNode goroutine就可通过Raft模块的输出接口Ready,获取到已提交的日志条目,然后提交到Apply模块的FIFO待执行队列。因为它是串行应用执行命令,任意请求在应用到状态机时阻塞都会导致写性能下降。
|
||
|
||
当Raft日志条目命令从FIFO队列取出执行后,它会首先通过授权模块校验是否有权限执行对应的写操作,对应图中的流程八。影响其性能因素是RBAC规则数和锁。
|
||
|
||
|
||
|
||
然后通过权限检查后,写事务则会从treeIndex模块中查找key、更新的key版本号等信息,对应图中的流程九,影响其性能因素是key数和锁。
|
||
|
||
更新完索引后,我们就可以把新版本号作为boltdb key, 把用户key/value、版本号等信息组合成一个value,写入到boltdb,对应图中的流程十,影响其性能因素是大value、锁。
|
||
|
||
如果你在应用中保存1Mb的value,这会给etcd稳定性带来哪些风险呢?
|
||
|
||
首先会导致读性能大幅下降、内存突增、网络带宽资源出现瓶颈等,上节课我已和你分享过一个1MB的key-value读性能压测结果,QPS从17万骤降到1100多。
|
||
|
||
那么写性能具体会下降到多少呢?
|
||
|
||
通过benchmark执行如下命令写入1MB的数据时候,集群几乎不可用(三节点8核16G,非SSD盘),事务提交P99延时高达4秒,如下图所示。
|
||
|
||
```
|
||
benchmark --endpoints=addr --conns=100 --clients=1000 \
|
||
put --key-size=8 --sequential-keys --total=500 --val-
|
||
size=1024000
|
||
|
||
```
|
||
|
||

|
||
|
||
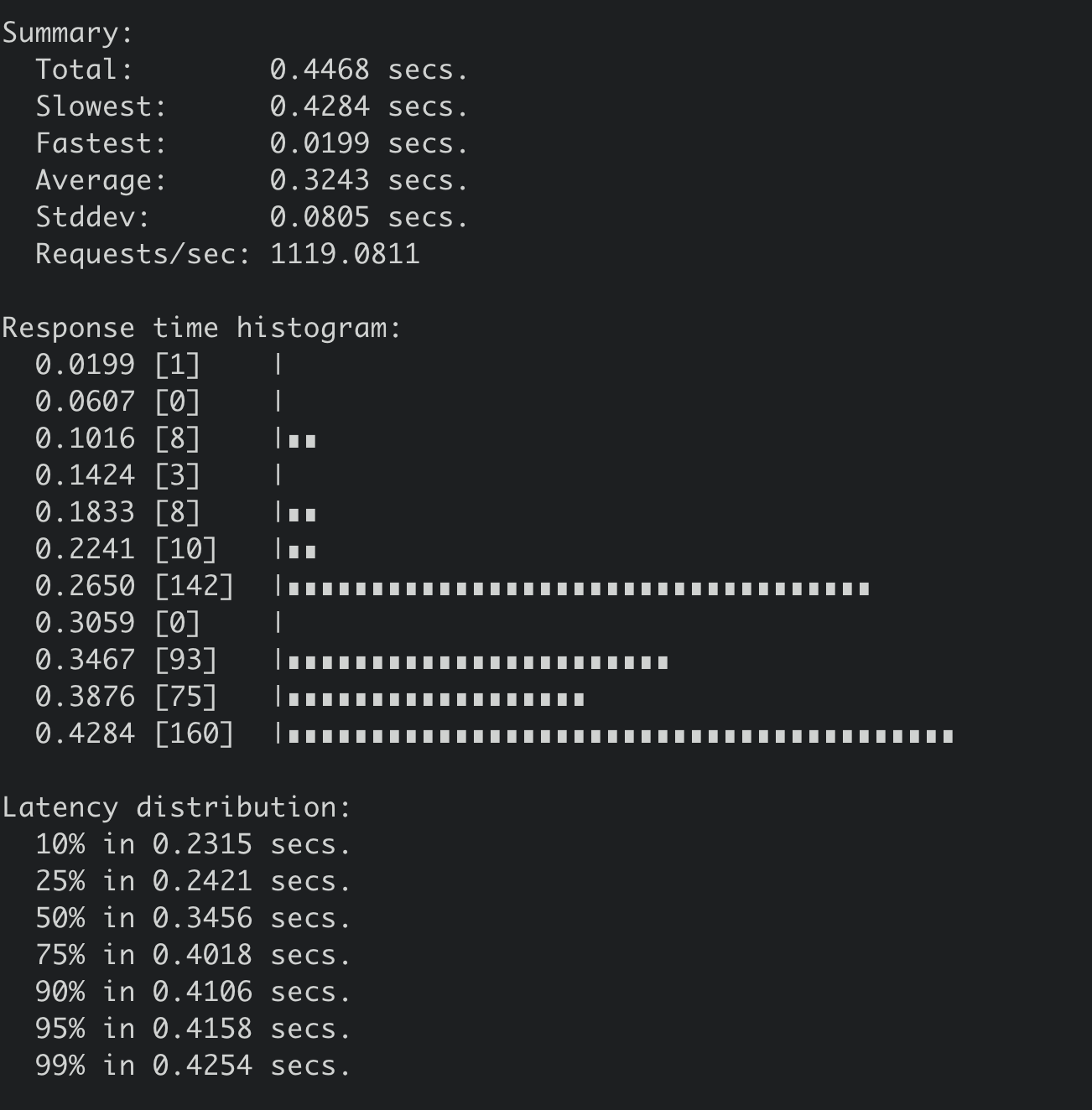
因此只能将写入的key-value大小调整为100KB。执行后得到如下结果,写入QPS 仅为1119/S,平均延时高达324ms。
|
||
|
||
|
||
|
||
其次etcd底层使用的boltdb存储,它是个基于COW(Copy-on-write)机制实现的嵌入式key-value数据库。较大的value频繁更新,因为boltdb的COW机制,会导致boltdb大小不断膨胀,很容易超过默认db quota值,导致无法写入。
|
||
|
||
那如何优化呢?
|
||
|
||
首先,如果业务已经使用了大key,拆分、改造存在一定客观的困难,那我们就从问题的根源之一的写入对症下药,尽量不要频繁更新大key,这样etcd db大小就不会快速膨胀。
|
||
|
||
你可以从业务场景考虑,判断频繁的更新是否合理,能否做到增量更新。之前遇到一个case, 一个业务定时更新大量key,导致被限速,最后业务通过增量更新解决了问题。
|
||
|
||
如果写请求降低不了, 就必须进行精简、拆分你的数据结构了。将你需要频繁更新的数据拆分成小key进行更新等,实现将value值控制在合理范围以内,才能让你的集群跑的更稳、更高效。
|
||
|
||
Kubernetes的Node心跳机制优化就是这块一个非常优秀的实践。早期kubelet会每隔10s上报心跳更新Node资源。但是此资源对象较大,导致db大小不断膨胀,无法支撑更大规模的集群。为了解决这个问题,社区做了数据拆分,将经常变更的数据拆分成非常细粒度的对象,实现了集群稳定性提升,支撑住更大规模的Kubernetes集群。
|
||
|
||
## boltdb锁
|
||
|
||
了解完大value对集群性能的影响后,我们再看影响流程十的另外一个核心因素boltdb锁。
|
||
|
||
首先我们回顾下etcd读写性能优化历史,它经历了以下流程:
|
||
|
||
* 3.0基于Raft log read实现线性读,线性读需要经过磁盘IO,性能较差;
|
||
* 3.1基于ReadIndex实现线性读,每个节点只需要向Leader发送ReadIndex请求,不涉及磁盘IO,提升了线性读性能;
|
||
* 3.2将访问boltdb的锁从互斥锁优化到读写锁,提升了并发读的性能;
|
||
* 3.4实现全并发读,去掉了buffer锁,长尾读几乎不再影响写。
|
||
|
||
并发读特性的核心原理是创建读事务对象时,它会全量拷贝当前写事务未提交的buffer数据,并发的读写事务不再阻塞在一个buffer资源锁上,实现了全并发读。
|
||
|
||
最重要的是,写事务也不再因为expensive read request长时间阻塞,有效的降低了写请求的延时,详细测试结果你可以参考[并发读特性实现PR](https://github.com/etcd-io/etcd/pull/10523),因篇幅关系就不再详细描述。
|
||
|
||
## 扩展性能
|
||
|
||
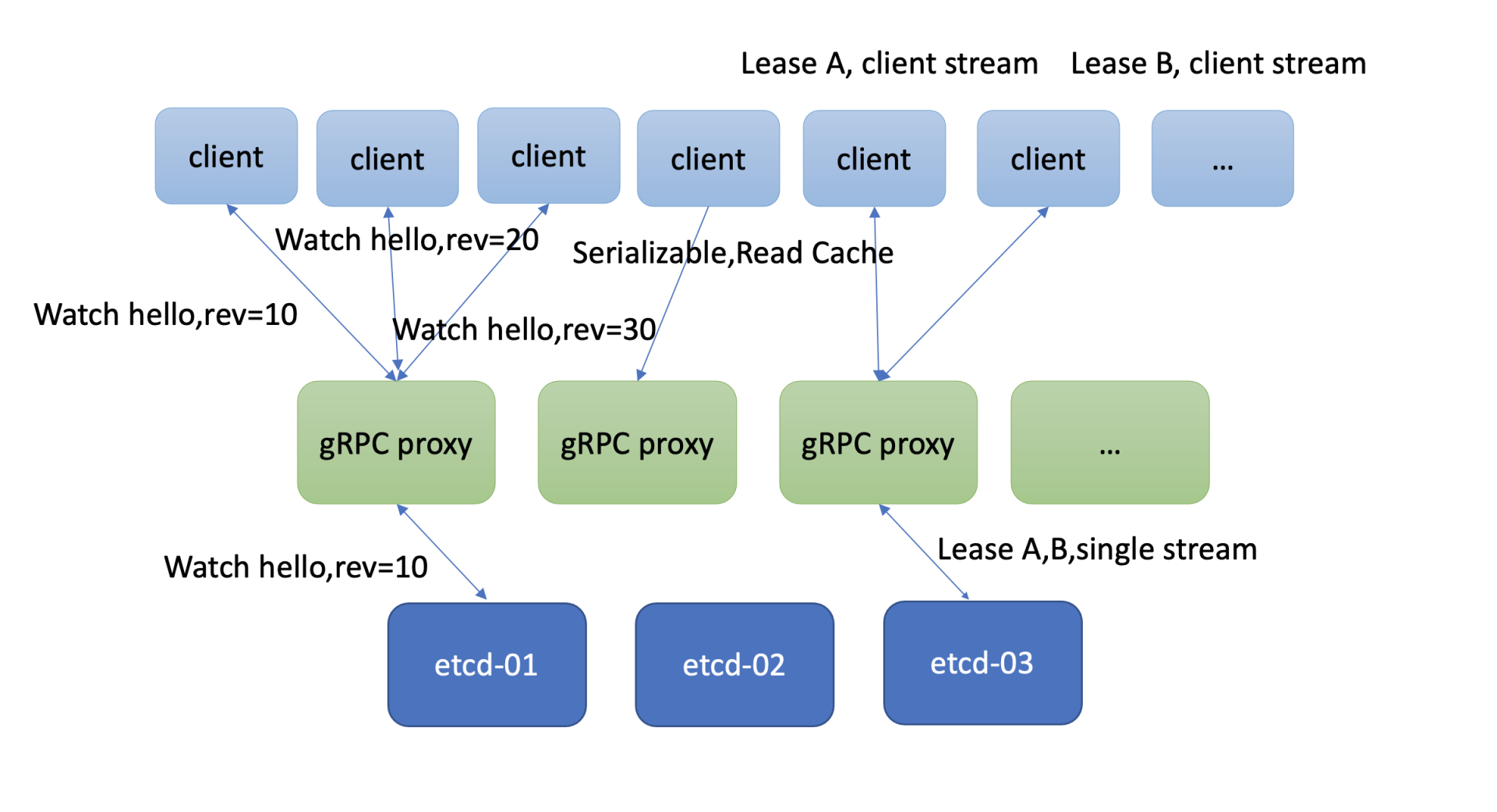
当然有不少业务场景你即便用最高配的硬件配置,etcd可能还是无法解决你所面临的性能问题。etcd社区也考虑到此问题,提供了一个名为[gRPC proxy](https://etcd.io/docs/v3.4.0/op-guide/grpc_proxy/)的组件,帮助你扩展读、扩展watch、扩展Lease性能的机制,如下图所示。
|
||
|
||
|
||
|
||
### 扩展读
|
||
|
||
如果你的client比较多,etcd集群节点连接数大于2万,或者你想平行扩展串行读的性能,那么gRPC proxy就是良好一个解决方案。它是个无状态节点,为你提供高性能的读缓存的能力。你可以根据业务场景需要水平扩容若干节点,同时通过连接复用,降低服务端连接数、负载。
|
||
|
||
它也提供了故障探测和自动切换能力,当后端etcd某节点失效后,会自动切换到其他正常节点,业务client可对此无感知。
|
||
|
||
### 扩展Watch
|
||
|
||
大量的watcher会显著增大etcd server的负载,导致读写性能下降。etcd为了解决这个问题,gRPC proxy组件里面提供了watcher合并的能力。如果多个client Watch同key或者范围(如上图三个client Watch同key)时,它会尝试将你的watcher进行合并,降低服务端的watcher数。
|
||
|
||
然后当它收到etcd变更消息时,会根据每个client实际Watch的版本号,将增量的数据变更版本,分发给你的多个client,实现watch性能扩展及提升。
|
||
|
||
### 扩展Lease
|
||
|
||
我们知道etcd Lease特性,提供了一种客户端活性检测机制。为了确保你的key不被淘汰,client需要定时发送keepalive心跳给server。当Lease非常多时,这就会导致etcd服务端的负载增加。在这种场景下,gRPC proxy提供了keepalive心跳连接合并的机制,来降低服务端负载。
|
||
|
||
## 小结
|
||
|
||
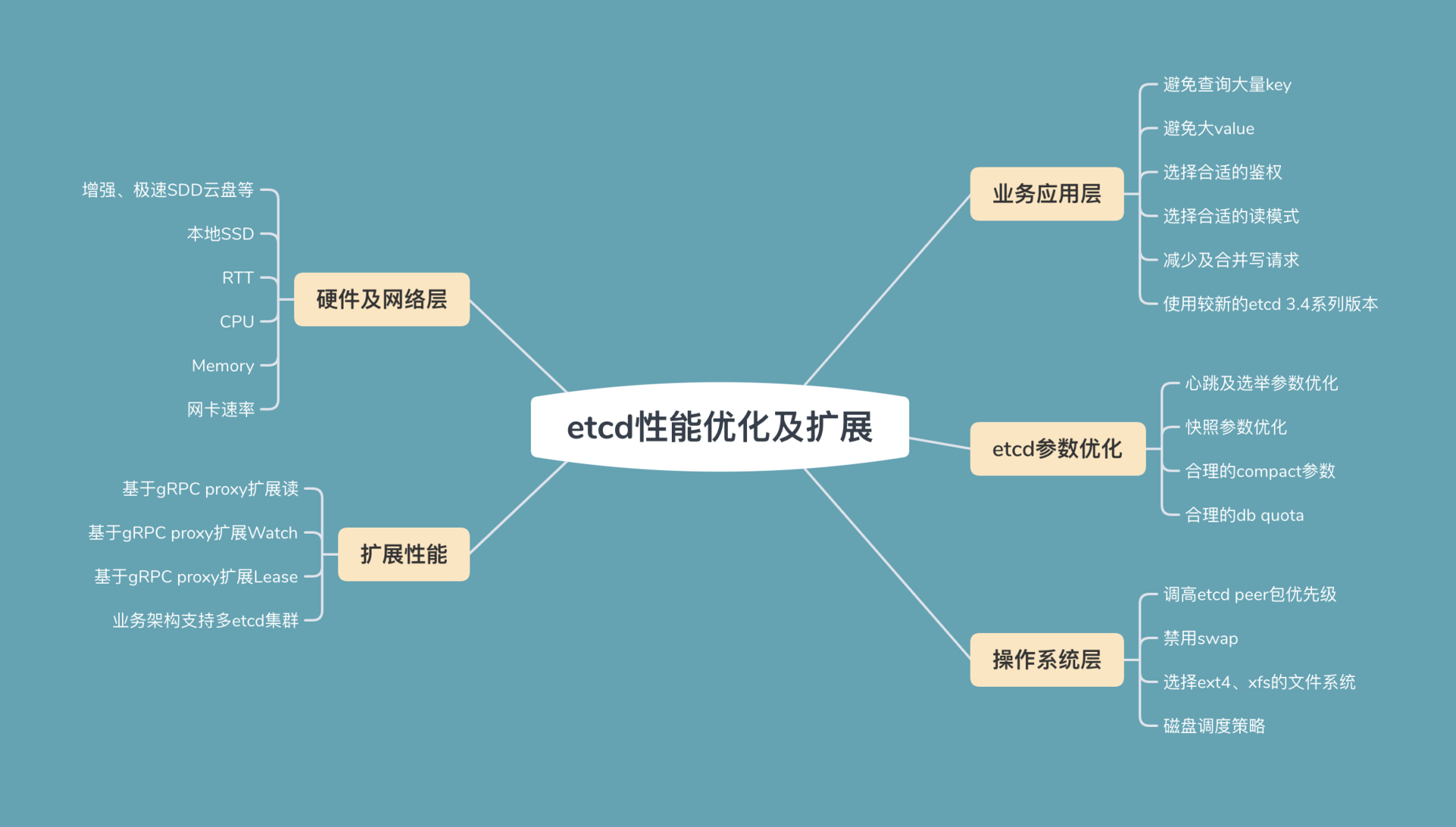
今天我通过从上至下的写请求流程分析,介绍了各个流程中可能存在的瓶颈和优化方法、最佳实践。最后我从分层的角度,为你总结了一幅优化思路全景图,你可以参考一下下面这张图,它将我们这两节课讨论的etcd性能优化、扩展问题分为了以下几类:
|
||
|
||
* 业务应用层,etcd应用层的最佳实践;
|
||
* etcd内核层,etcd参数最佳实践;
|
||
* 操作系统层,操作系统优化事项;
|
||
* 硬件及网络层,不同的硬件设备对etcd性能有着非常大的影响;
|
||
* 扩展性能,基于gRPC proxy扩展读、Watch、Lease的性能。
|
||
|
||
希望你通过这节课的学习,以后在遇到etcd性能问题时,能分别从请求执行链路和分层的视角去分析、优化瓶颈,让业务和etcd跑得更稳、更快。
|
||
|
||
|
||
|
||
## 思考题
|
||
|
||
最后,我还给你留了一个思考题。
|
||
|
||
watcher较多的情况下,会不会对读写请求性能有影响呢?如果会,是在什么场景呢?gRPC proxy能安全的解决watcher较多场景下的扩展性问题吗?
|
||
|
||
欢迎分享你的性能优化经历,感谢你阅读,也欢迎你把这篇文章分享给更多的朋友一起阅读。
|
||
|