196 lines
19 KiB
Markdown
196 lines
19 KiB
Markdown
# 31|并发:Go的并发方案实现方案是怎样的?
|
||
|
||
你好,我是Tony Bai。
|
||
|
||
从这一讲开始,我们将会学习这门课的最后一个语法知识:**Go并发**。在[02讲](https://time.geekbang.org/column/article/426740)中我们提到过:Go的设计者敏锐地把握了CPU向多核方向发展的这一趋势,在决定去创建Go语言的时候,他们果断将面向多核、**原生支持并发**作为了Go语言的设计目标之一,并将面向并发作为Go的设计哲学。当Go语言首次对外发布时,对并发的原生支持成为了Go最令开发者着迷的语法特性之一。
|
||
|
||
那么,怎么去学习Go并发呢?我的方法是将“Go并发”这个词拆开来看,它包含两方面内容,一个是并发的概念,另一个是Go针对并发设计给出的自身的实现方案,也就是goroutine、channel、select这些Go并发的语法特性。
|
||
|
||
今天这节课,我们就先来了解什么是并发,以及Go并发方案中最重要的概念,也就是goroutine,围绕它基本用法和注意事项,让你对Go并发有一个基本的了解,后面我们再层层深入。
|
||
|
||
## 什么是并发?
|
||
|
||
课程一开始,我们就经常提到并发(concurrency)这个词。说了这么长时间的并发,那究竟什么是并发呢?它又与并行(parallelism)有什么区别呢?要想搞清楚这些问题,我们需要简单回顾一下操作系统的基本调度单元的变迁,以及计算机处理器的演化对应用设计的影响。
|
||
|
||
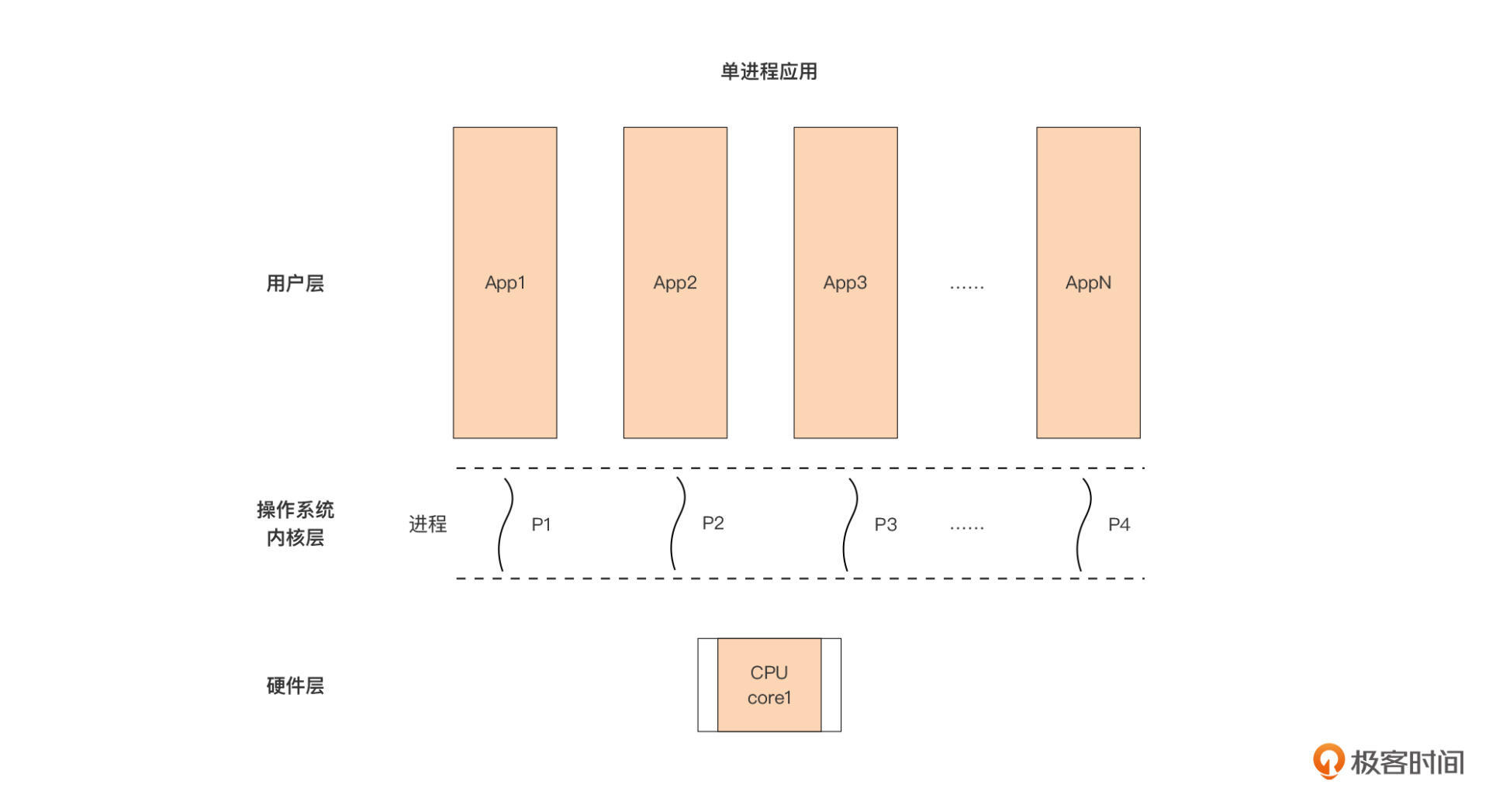
很久以前,面向大众消费者的主流处理器(CPU)都是单核的,操作系统的基本调度与执行单元是进程(process)。这个时候,用户层的应用有两种设计方式,一种是单进程应用,也就是每次启动一个应用,操作系统都只启动一个进程来运行这个应用。
|
||
|
||
单进程应用的情况下,用户层应用、操作系统进程以及处理器之间的关系是这样的:
|
||
|
||
|
||
|
||
我们看到,这个设计下,每个单进程应用对应一个操作系统进程,操作系统内的多个进程按时间片大小,被轮流调度到仅有的一颗单核处理器上执行。换句话说,这颗单核处理器在某个时刻只能执行一个进程对应的程序代码,两个进程不存在并行执行的可能。
|
||
|
||
这里说的**并行(parallelism),指的就是在同一时刻,有两个或两个以上的任务(这里指进程)的代码在处理器上执行**。从这个概念我们也可以知道,多个处理器或多核处理器是并行执行的必要条件。
|
||
|
||
总的来说,单进程应用的设计比较简单,它的内部仅有一条代码执行流,代码从头执行到尾,不存在竞态,无需考虑同步问题。
|
||
|
||
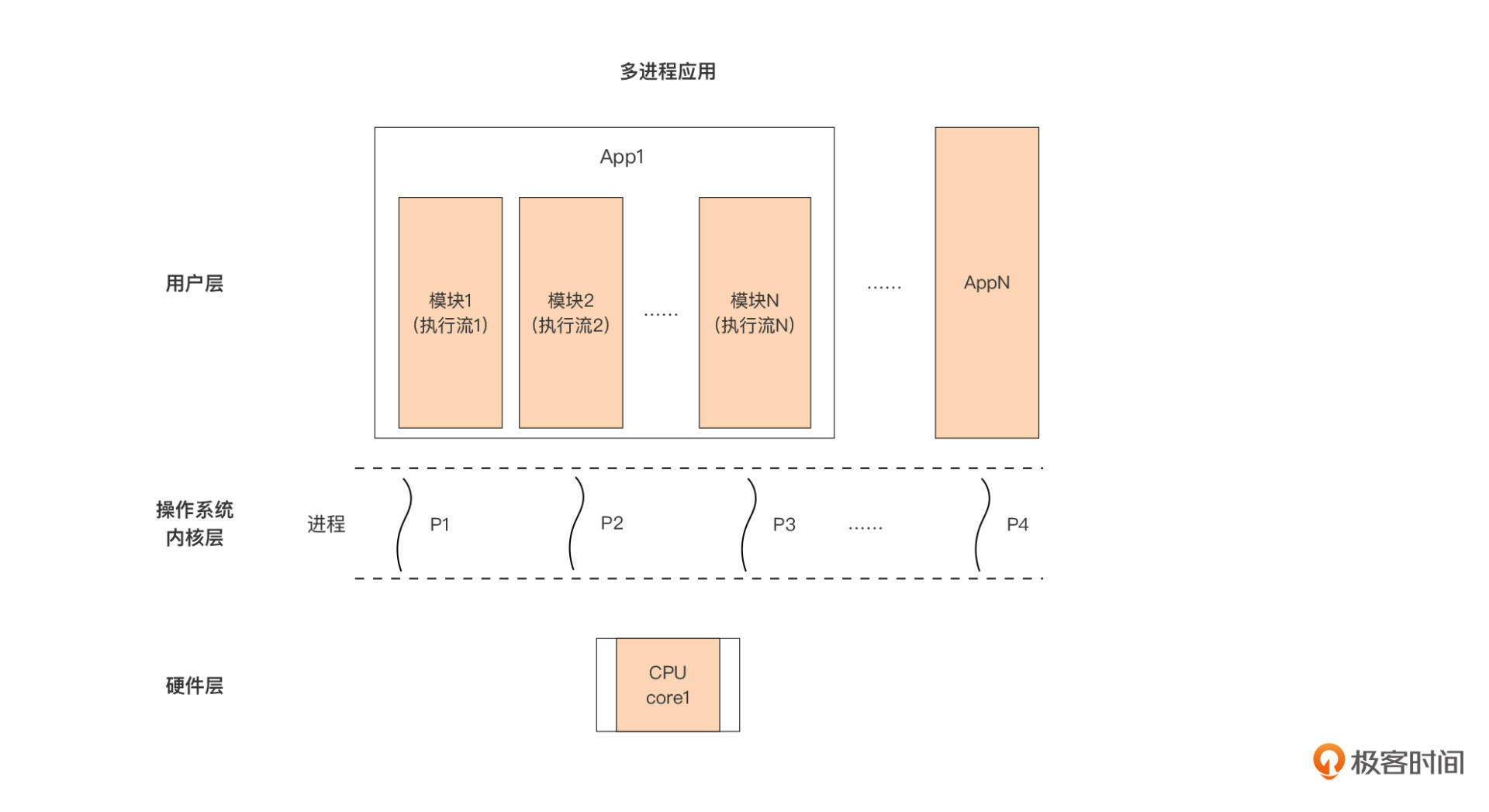
用户层的另外一种设计方式,就是多进程应用,也就是应用通过fork等系统调用创建多个子进程,共同实现应用的功能。多进程应用的情况下,用户层应用、操作系统进程以及处理器之间的关系是这样的:
|
||
|
||
|
||
|
||
以图中的App1为例,这个应用设计者将应用内部划分为多个模块,每个模块用一个进程承载执行,每个模块都是一个单独的执行流,这样,App1内部就有了多个独立的代码执行流。
|
||
|
||
但限于当前仅有一颗单核处理器,这些进程(执行流)依旧无法并行执行,无论是App1内部的某个模块对应的进程,还是其他App对应的进程,都得逐个按时间片被操作系统调度到处理器上执行。
|
||
|
||
**粗略看起来,多进程应用与单进程应用相比并没有什么质的提升。那我们为什么还要将应用设计为多进程呢?**
|
||
|
||
这更多是从应用的结构角度去考虑的,多进程应用由于将功能职责做了划分,并指定专门的模块来负责,所以从结构上来看,要比单进程更为清晰简洁,可读性与可维护性也更好。**这种将程序分成多个可独立执行的部分的结构化程序的设计方法,就是并发设计**。采用了并发设计的应用也可以看成是一组独立执行的模块的组合。
|
||
|
||
不过,进程并不适合用于承载采用了并发设计的应用的模块执行流。因为进程是操作系统中资源拥有的基本单位,它不仅包含应用的代码和数据,还有系统级的资源,比如文件描述符、内存地址空间等等。进程的“包袱”太重,这导致它的创建、切换与撤销的代价都很大。
|
||
|
||
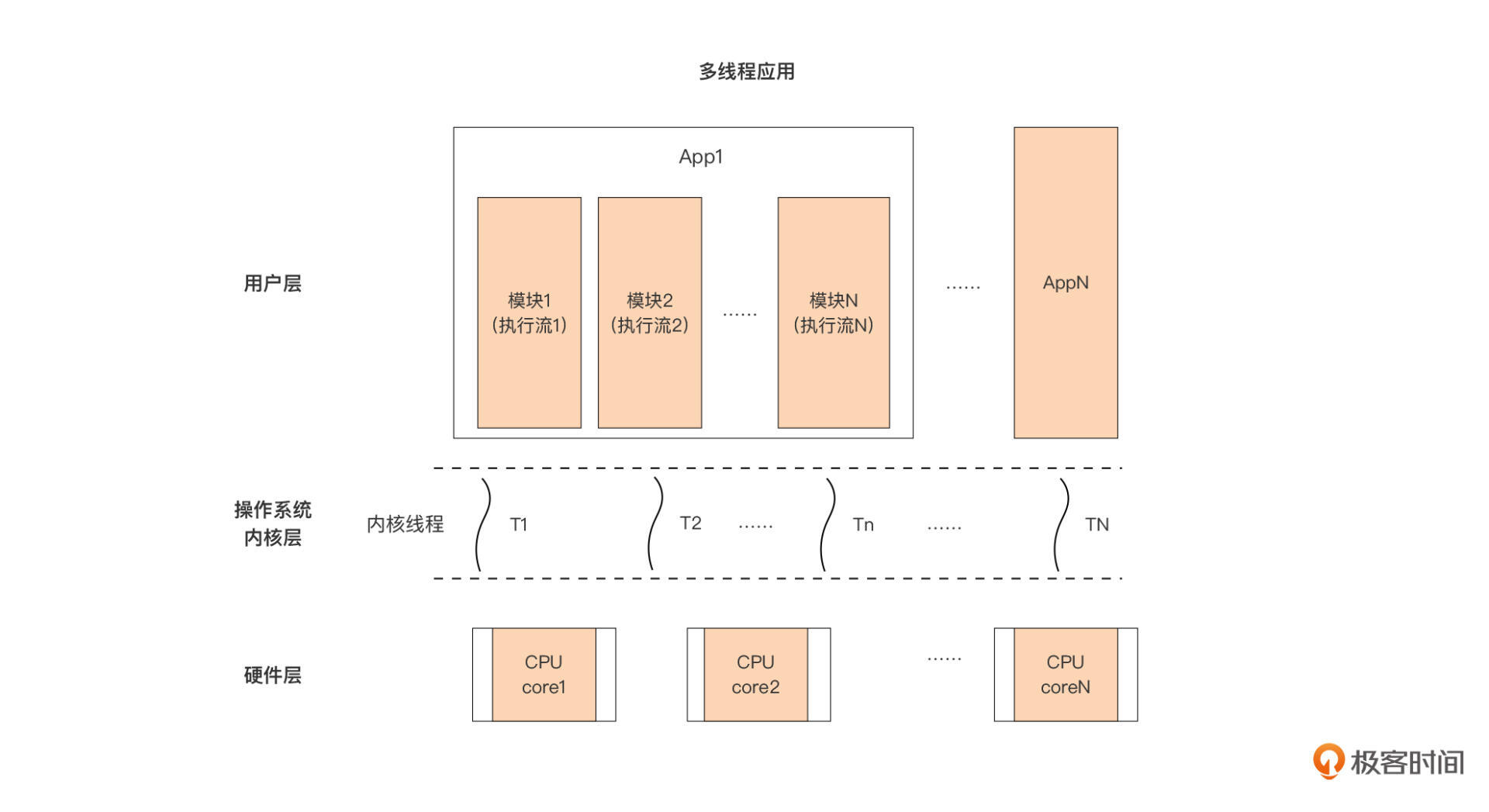
于是线程便走入了人们的视野,线程就是运行于进程上下文中的更轻量级的执行流。同时随着处理器技术的发展,多核处理器硬件成为了主流,这让真正的并行成为了可能,于是主流的应用设计模型变成了这样:
|
||
|
||
|
||
|
||
我们看到,基于线程的应用通常采用单进程多线程的模型,一个应用对应一个进程,应用通过并发设计将自己划分为多个模块,每个模块由一个线程独立承载执行。多个线程共享这个进程所拥有的资源,但线程作为执行单元可被独立调度到处理器上运行。
|
||
|
||
线程的创建、切换与撤销的代价相对于进程是要小得多。当这个应用的多个线程同时被调度到不同的处理器核上执行时,我们就说这个应用是并行的。
|
||
|
||
讲到这里,我们可以对并发与并行两个概念做一些区分了。就像Go语言之父Rob Pike曾说过那样:**并发不是并行,并发关乎结构,并行关乎执行**。
|
||
|
||
结合上面的例子,我们看到,并发是在应用设计与实现阶段要考虑的问题。并发考虑的是如何将应用划分为多个互相配合的、可独立执行的模块的问题。采用并发设计的程序并不一定是并行执行的。
|
||
|
||
在不满足并行必要条件的情况下(也就是仅有一个单核CPU的情况下),即便是采用并发设计的程序,依旧不可以并行执行。而在满足并行必要条件的情况下,采用并发设计的程序是可以并行执行的。而那些没有采用并发设计的应用程序,除非是启动多个程序实例,否则是无法并行执行的。
|
||
|
||
在多核处理器成为主流的时代,即使采用并发设计的应用程序以单实例的方式运行,其中的每个内部模块也都是运行于一个单独的线程中的,多核资源也可以得到充分利用。而且,并发让并行变得更加容易,采用并发设计的应用可以将负载自然扩展到各个CPU核上,从而提升处理器的利用效率。
|
||
|
||
在传统编程语言(如C、C++等)中,基于**多线程模型**的应用设计就是一种典型的并发程序设计。但传统编程语言并非面向并发而生,没有对并发设计提供过多的帮助。并且,这些语言多以操作系统线程作为承载分解后的代码片段(模块)的执行单元,由操作系统执行调度。这种传统支持并发的方式有很多不足:
|
||
|
||
**首先就是复杂。**
|
||
|
||
创建容易退出难。如果你做过C/C++编程,那你肯定知道,如果我们要利用libpthread库中提供的API创建一个线程,虽然要传入的参数个数不少,但好歹还是可以接受的。但一旦涉及线程的退出,就要考虑新创建的线程是否要与主线程分离(detach),还是需要主线程等待子线程终止(join)并获取其终止状态?又或者是否需要在新线程中设置取消点(cancel point)来保证被主线程取消(cancel)的时候能顺利退出。
|
||
|
||
而且,并发执行单元间的通信困难且易错。多个线程之间的通信虽然有多种机制可选,但用起来也是相当复杂。并且一旦涉及共享内存,就会用到各种锁互斥机制,死锁便成为家常便饭。另外,线程栈大小也需要设定,开发人员需要选择使用默认的,还是自定义设置。
|
||
|
||
**第二就是难于规模化(scale)。**
|
||
|
||
线程的使用代价虽然已经比进程小了很多,但我们依然不能大量创建线程,因为除了每个线程占用的资源不小之外,操作系统调度切换线程的代价也不小。
|
||
|
||
对于很多网络服务程序来说,由于不能大量创建线程,只能选择在少量线程里做网络多路复用的方案,也就是使用epoll/kqueue/IoCompletionPort这套机制,即便有像[libevent](https://github.com/libevent/libevent)和[libev](http://software.schmorp.de/pkg/libev.html)这样的第三方库帮忙,写起这样的程序也是很不容易的,存在大量钩子回调,给开发人员带来不小的心智负担。
|
||
|
||
那么以“原生支持并发”著称的Go语言在并发方面的实现方案又是什么呢?相对于基于线程的并发设计模型又有哪些改善呢?接下来我们就一起来看一下。
|
||
|
||
## Go的并发方案:goroutine
|
||
|
||
Go并没有使用操作系统线程作为承载分解后的代码片段(模块)的基本执行单元,而是实现了`goroutine`这一**由Go运行时(runtime)负责调度的、轻量的用户级线程**,为并发程序设计提供原生支持。
|
||
|
||
我们先来看看这一方案有啥优势。相比传统操作系统线程来说,goroutine的优势主要是:
|
||
|
||
* 资源占用小,每个goroutine的初始栈大小仅为2k;
|
||
* 由Go运行时而不是操作系统调度,goroutine上下文切换在用户层完成,开销更小;
|
||
* 在语言层面而不是通过标准库提供。goroutine由`go`关键字创建,一退出就会被回收或销毁,开发体验更佳;
|
||
* 语言内置channel作为goroutine间通信原语,为并发设计提供了强大支撑。
|
||
|
||
我们看到,和传统编程语言不同的是,Go语言是面向并发而生的,所以,在程序的结构设计阶段,**Go的惯例是优先考虑并发设计**。这样做的目的更多是考虑随着外界环境的变化,通过并发设计的Go应用可以更好地、更自然地适应**规模化(scale)**。
|
||
|
||
比如,当应用被分配到更多计算资源,或者计算处理硬件增配后,Go应用不需要再进行结构调整,就可以充分利用新增的计算资源。而且,经过并发设计后的Go应用也会更加契合Gopher们的开发分工协作。
|
||
|
||
接下来,我们来看看在Go中究竟如何使用goroutine。
|
||
|
||
### goroutine的基本用法
|
||
|
||
**并发**是一种能力,它让你的程序可以由若干个代码片段**组合**而成,并且每个片段都是独立运行的。goroutine恰恰就是Go原生支持并发的一个具体实现。无论是Go自身运行时代码还是用户层Go代码,都无一例外地运行在goroutine中。
|
||
|
||
首先我们来创建一个goroutine。
|
||
|
||
Go语言通过`go关键字+函数/方法`的方式创建一个goroutine。创建后,新goroutine将拥有独立的代码执行流,并与创建它的goroutine一起被Go运行时调度。
|
||
|
||
这里我给出了一些创建goroutine的代码示例:
|
||
|
||
```plain
|
||
go fmt.Println("I am a goroutine")
|
||
|
||
var c = make(chan int)
|
||
go func(a, b int) {
|
||
c <- a + b
|
||
}(3,4)
|
||
|
||
// $GOROOT/src/net/http/server.go
|
||
c := srv.newConn(rw)
|
||
go c.serve(connCtx)
|
||
|
||
```
|
||
|
||
我们看到,通过go关键字,我们可以基于已有的具名函数/方法创建goroutine,也可以基于匿名函数/闭包创建goroutine。
|
||
|
||
在前面的讲解中,我们曾说过,创建goroutine后,go关键字不会返回goroutine id之类的唯一标识goroutine的id,你也不要尝试去得到这样的id并依赖它。另外,和线程一样,一个应用内部启动的所有goroutine共享进程空间的资源,如果多个goroutine访问同一块内存数据,将会存在竞争,我们需要进行goroutine间的同步。
|
||
|
||
了解了怎么创建,那我们怎么退出goroutine呢?
|
||
|
||
goroutine的使用代价很低,Go官方也推荐你多多使用goroutine。而且,多数情况下,我们不需要考虑对goroutine的退出进行控制:**goroutine的执行函数的返回,就意味着goroutine退出。**
|
||
|
||
如果main goroutine退出了,那么也意味着整个应用程序的退出。此外,你还要注意的是,goroutine执行的函数或方法即便有返回值,Go也会忽略这些返回值。所以,如果你要获取goroutine执行后的返回值,你需要另行考虑其他方法,比如通过goroutine间的通信来实现。
|
||
|
||
接下来我们就来说说goroutine间的通信方式。
|
||
|
||
### goroutine间的通信
|
||
|
||
传统的编程语言(比如:C++、Java、Python等)并非面向并发而生的,所以他们面对并发的逻辑多是基于操作系统的线程。并发的执行单元(线程)之间的通信,利用的也是操作系统提供的线程或进程间通信的原语,比如:共享内存、信号(signal)、管道(pipe)、消息队列、套接字(socket)等。
|
||
|
||
在这些通信原语中,使用最多、最广泛的(也是最高效的)是结合了线程同步原语(比如:锁以及更为低级的原子操作)的共享内存方式,因此,我们可以说传统语言的并发模型是**基于对内存的共享的**。
|
||
|
||
不过,这种传统的基于共享内存的并发模型很**难用**,且**易错**,尤其是在大型或复杂程序中,开发人员在设计并发程序时,需要根据线程模型对程序进行建模,同时规划线程之间的通信方式。如果选择的是高效的基于共享内存的机制,那么他们还要花费大量心思设计线程间的同步机制,并且在设计同步机制的时候,还要考虑多线程间复杂的内存管理,以及如何防止死锁等情况。
|
||
|
||
这种情况下,开发人员承受着巨大的心智负担,并且基于这类传统并发模型的程序难于编写、阅读、理解和维护。一旦程序发生问题,查找Bug的过程更是漫长和艰辛。
|
||
|
||
但Go语言就不一样了!Go语言从设计伊始,就将解决上面这个传统并发模型的问题作为Go的一个目标,并在新并发模型设计中借鉴了著名计算机科学家[Tony Hoare](https://en.wikipedia.org/wiki/Tony_Hoare)提出的**CSP(Communicationing Sequential Processes,通信顺序进程)**并发模型。
|
||
|
||
Tony Hoare的CSP模型旨在简化并发程序的编写,让并发程序的编写与编写顺序程序一样简单。Tony Hoare认为输入输出应该是基本的编程原语,数据处理逻辑(也就是CSP中的P)只需调用输入原语获取数据,顺序地处理数据,并将结果数据通过输出原语输出就可以了。
|
||
|
||
因此,在Tony Hoare眼中,**一个符合CSP模型的并发程序应该是一组通过输入输出原语连接起来的P的集合**。从这个角度来看,CSP理论不仅是一个并发参考模型,也是一种并发程序的程序组织方法。它的组合思想与Go的设计哲学不谋而合。
|
||
|
||
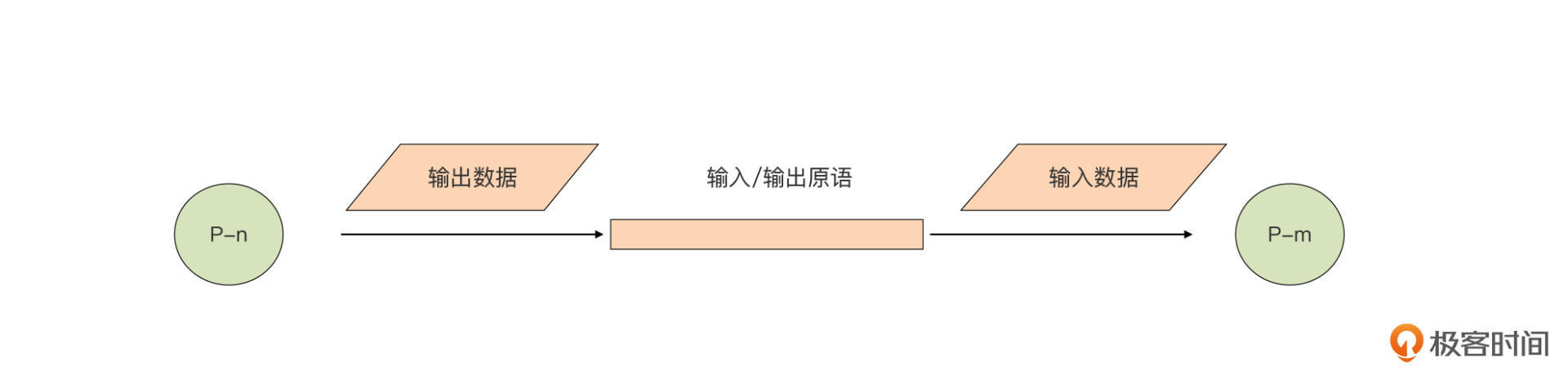
Tony Hoare的CSP理论中的P,也就是“Process(进程)”,是一个抽象概念,它代表任何顺序处理逻辑的封装,它获取输入数据(或从其他P的输出获取),并生产出可以被其他P消费的输出数据。这里我们可以简单看下CSP通信模型的示意图:
|
||
|
||
|
||
|
||
注意了,这里的P并不一定与操作系统的进程或线程划等号。在Go中,与“Process”对应的是goroutine。为了实现CSP并发模型中的输入和输出原语,Go还引入了goroutine(P)之间的通信原语`channel`。goroutine可以从channel获取输入数据,再将处理后得到的结果数据通过channel输出。通过channel将goroutine(P)组合连接在一起,让设计和编写大型并发系统变得更加简单和清晰,我们再也不用为那些传统共享内存并发模型中的问题而伤脑筋了。
|
||
|
||
比如我们上面提到的获取goroutine的退出状态,就可以使用channel原语实现:
|
||
|
||
```plain
|
||
func spawn(f func() error) <-chan error {
|
||
c := make(chan error)
|
||
|
||
go func() {
|
||
c <- f()
|
||
}()
|
||
|
||
return c
|
||
}
|
||
|
||
func main() {
|
||
c := spawn(func() error {
|
||
time.Sleep(2 * time.Second)
|
||
return errors.New("timeout")
|
||
})
|
||
fmt.Println(<-c)
|
||
}
|
||
|
||
```
|
||
|
||
这个示例在main goroutine与子goroutine之间建立了一个元素类型为error的channel,子goroutine退出时,会将它执行的函数的错误返回值写入这个channel,main goroutine可以通过读取channel的值来获取子goroutine的退出状态。
|
||
|
||
虽然CSP模型已经成为Go语言支持的主流并发模型,但Go也支持传统的、基于共享内存的并发模型,并提供了基本的低级别同步原语(主要是sync包中的互斥锁、条件变量、读写锁、原子操作等)。
|
||
|
||
那么我们在实践中应该选择哪个模型的并发原语呢?是使用channel,还是在低级同步原语保护下的共享内存呢?
|
||
|
||
毫无疑问,从程序的整体结构来看,**Go始终推荐以CSP并发模型风格构建并发程序**,尤其是在复杂的业务层面,这能提升程序的逻辑清晰度,大大降低并发设计的复杂性,并让程序更具可读性和可维护性。
|
||
|
||
不过,对于局部情况,比如涉及性能敏感的区域或需要保护的结构体数据时,我们可以使用更为高效的低级同步原语(如mutex),保证goroutine对数据的同步访问。
|
||
|
||
## 小结
|
||
|
||
好了,今天的课讲到这里就结束了,现在我们一起来回顾一下吧。
|
||
|
||
这一讲中,我们开始了对Go并发的学习,了解了并发的含义,以及并发与并行两个概念的区别。你一定要记住:**并发不是并行**。并发是应用结构设计相关的概念,而并行只是程序执行期的概念,并行的必要条件是具有多个处理器或多核处理器,否则无论是否是并发的设计,程序执行时都有且仅有一个任务可以被调度到处理器上执行。
|
||
|
||
传统的编程语言(比如:C、C++)的并发程序设计方案是基于操作系统的线程调度模型的,这种模型与操作系统的调度强耦合,并且对于开发人员来说十分复杂,开发体验较差并且易错。
|
||
|
||
而Go给出的并发方案是基于轻量级线程goroutine的。goroutine占用的资源非常小,创建、切换以及销毁的开销很小。并且Go在语法层面原生支持基于goroutine的并发,通过一个go关键字便可以轻松创建goroutine,goroutine占用的资源非常小,创建、切换以及销毁的开销很小。这给开发者带来极佳的开发体验。
|
||
|
||
## 思考题
|
||
|
||
goroutine作为Go应用的基本执行单元,它的创建、退出以及goroutine间的通信都有很多常见的模式可循。你可以分享一下日常开发中你见过的实用的goroutine使用模式吗?
|
||
|
||
欢迎把这节课分享给更多对Go并发感兴趣的朋友。我是Tony Bai,下节课见。
|
||
|