|
|
# 14|标准库:如何使用互斥量等技术协调线程运行?
|
|
|
|
|
|
你好,我是于航。
|
|
|
|
|
|
在上一讲中,我主要介绍了有关并发编程的一些基础知识,并通过一个简单的例子展示了如何在 C 语言中进行线程创建等基本操作。同时我也向你介绍了,数据竞争、竞态条件,以及指令重排等因素,都在如何影响着多线程应用的执行正确性。那么,有哪些方法可以辅助我们解决这些问题呢?
|
|
|
|
|
|
今天我们就来看看 C 语言为并发编程提供的几大利器:互斥量、原子操作、条件变量,以及线程本地变量。
|
|
|
|
|
|
## 使用互斥量
|
|
|
|
|
|
从本质上来看,互斥量(Mutex)其实就是一把锁。一个线程在访问某个共享资源前,需要先对互斥量进行加锁操作。此时,其他任何想要再对互斥量进行加锁的线程都会被阻塞,直至当前线程释放该锁。而当锁被释放后,所有之前被阻塞的线程都开始继续运行,并再次重复之前的步骤,开始“争夺”可以对互斥量进行加锁的名额。通过这种方式,我们便可以保证每次在对多线程共享的资源进行操作时,都仅只有一个线程。
|
|
|
|
|
|
在 C 语言中,我们可以通过头文件 threads.h 提供的,以 “mtx\_” 为前缀的相关接口来使用互斥量的能力。你应该还记得我在[上一讲](https://time.geekbang.org/column/article/477358)中提到的,那段存在数据竞争的 C 示例代码。这里我对它进行了改写,如下所示:
|
|
|
|
|
|
```c++
|
|
|
#include <threads.h>
|
|
|
#include <stdio.h>
|
|
|
#define THREAD_COUNT 10
|
|
|
#define THREAD_LOOP 100000000
|
|
|
mtx_t mutex;
|
|
|
long counter = 0;
|
|
|
int run(void* data) {
|
|
|
for (int i = 0; i < THREAD_LOOP; i++) {
|
|
|
mtx_lock(&mutex); // 对互斥量加锁,
|
|
|
counter++;
|
|
|
mtx_unlock(&mutex); // 释放一个互斥量;
|
|
|
}
|
|
|
printf("Thread %d terminates.\n", *((int*) data));
|
|
|
return thrd_success;
|
|
|
}
|
|
|
int main(void) {
|
|
|
#ifndef __STDC_NO_THREADS__
|
|
|
int ids[THREAD_COUNT];
|
|
|
mtx_init(&mutex, mtx_plain); // 创建一个简单、非递归的互斥量对象;
|
|
|
thrd_t threads[THREAD_COUNT];
|
|
|
for (int i = 0; i < THREAD_COUNT; i++) {
|
|
|
ids[i] = i + 1;
|
|
|
thrd_create(&threads[i], run, ids + i);
|
|
|
}
|
|
|
for (int i = 0; i < THREAD_COUNT; i++)
|
|
|
thrd_join(threads[i], NULL);
|
|
|
printf("Counter value is: %ld.\n", counter);
|
|
|
mtx_destroy(&mutex); // 销毁一个互斥量对象;
|
|
|
#endif
|
|
|
return 0;
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
可以看到,在代码的第 19 行,我们使用 mtx\_init 函数创建了一个基本类型(mtx\_plain)的互斥量对象(下文中简称互斥量)。紧接着,在 run 函数内部,对变量 counter 进行值累加操作前,我们需要通过 mtx\_lock 函数,来对之前创建的互斥量进行加锁操作。同样地,当进程使用完共享变量后,还需要通过 mtx\_unlock 函数对互斥量进行解锁,来让其他线程有机会继续对共享变量进行处理。最后,在代码的第 28 行,程序退出前,我们销毁了之前创建的互斥量。
|
|
|
|
|
|
总的来看,**在 C 语言中,互斥量可以被分为三种类型****:****mtx\_plain、mtx\_recursive 与 mtx\_timed**。
|
|
|
|
|
|
其中,mtx\_plain 为最简单类型的互斥量,我们可以对它进行基本的加锁和解锁,但不能将其用在需要“重复加锁”的场景(比如函数的递归调用)中。这是因为,即使当前线程拥有该锁,对同一个 mtx\_plain 互斥量的再次加锁也会导致该线程被阻塞。而此时,便会产生死锁的问题,即当前线程等待自己解锁后才能够再次进行加锁,而想要解锁,则需要让线程先加锁以完成当前功能的执行。
|
|
|
|
|
|
相反,mtx\_recursive 类型的互斥量也被称为“可重入互斥量(Reentrant Mutex)”,顾名思义,它可以被用在需要重复加锁的场景中。该类型互斥量可以被同一个线程重复锁定多次,而不会阻塞线程。但相应地,对它的完全解锁也需要执行对应多次的 mtx\_unlock。
|
|
|
|
|
|
而最后一种是 mtx\_timed 类型的互斥量,它具有特殊的“超时属性”。这意味着,通过配合使用 mtx\_timedlock 函数,我们可以实现“带超时限制的互斥量加锁”,即线程在尝试给对应互斥量加锁时,只会以阻塞的方式等待一定时间。若超过给定时间后仍未给互斥量成功上锁,则线程继续执行。
|
|
|
|
|
|
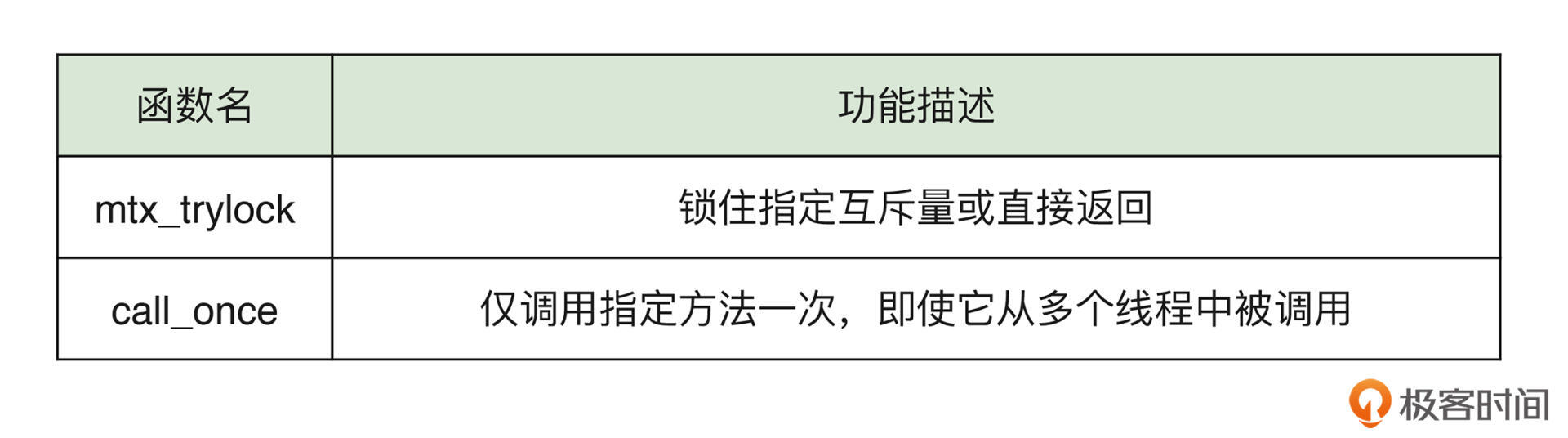
除了上面提到过的函数,C 标准库还提供了另外两个与“互斥”有关的函数。这里,我将它们整理在了下面的表格中,供你参考。
|
|
|
|
|
|
|
|
|
|
|
|
利用互斥锁能够帮助我们解决数据竞争问题,但在某些对性能要求更加严苛的场景下,它可能并非最好的选择。接下来,让我们来看看另一种可以避免数据竞争的方式,原子操作。
|
|
|
|
|
|
## 使用原子操作
|
|
|
|
|
|
原子是化学反应中不可被继续分割的基本微粒,那么顾名思义,“原子操作”的意思就是操作本身无法再被划分为更细的步骤。当我们在多个不同线程中对共享资源进行原子操作时,编译器和 CPU 将会保证这些操作的正确执行,即同一时刻只会有一个线程在进行这些操作。而只有在该线程将整个操作全部执行完毕后,其他线程才可以继续执行同样的操作。
|
|
|
|
|
|
类似地,通过 C11 提供的名为 stdatomic.h 的头文件,我们可以方便地使用这些原子操作能力。比如,在下面这段代码中,我们便通过这种方式,解决了[上一讲](https://time.geekbang.org/column/article/477358)中那个实例的数据竞争问题。
|
|
|
|
|
|
```c++
|
|
|
#include <threads.h>
|
|
|
#include <stdio.h>
|
|
|
#include <stdatomic.h>
|
|
|
#define THREAD_COUNT 10
|
|
|
#define THREAD_LOOP 100000000
|
|
|
#if !defined(__STDC_NO_ATOMICS__)
|
|
|
_Atomic long counter = 0; // 定义一个原子类型全局变量,用来记录线程的累加值;
|
|
|
#endif
|
|
|
int run(void* data) {
|
|
|
for (int i = 0; i < THREAD_LOOP; i++)
|
|
|
atomic_fetch_add_explicit(&counter, 1, memory_order_relaxed); // 使用原子加法操作;
|
|
|
printf("Thread %d terminates.\n", *((int*) data));
|
|
|
return thrd_success;
|
|
|
}
|
|
|
int main(void) {
|
|
|
#if !defined(__STDC_NO_THREADS__) || !defined(__STDC_NO_ATOMICS__)
|
|
|
int ids[THREAD_COUNT];
|
|
|
thrd_t threads[THREAD_COUNT];
|
|
|
for (int i = 0; i < THREAD_COUNT; i++) {
|
|
|
ids[i] = i + 1;
|
|
|
thrd_create(&threads[i], run, ids + i);
|
|
|
}
|
|
|
for (int i = 0; i < THREAD_COUNT; i++)
|
|
|
thrd_join(threads[i], NULL);
|
|
|
printf("Counter value is: %ld.\n", counter);
|
|
|
#endif
|
|
|
return 0;
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
与使用线程控制相关接口类似,我们也需要通过名为 **STDC\_NO\_ATOMICS** 的宏,来判断编译器是否对原子操作提供支持。可以看到,我们分别在代码的第 6 行与第 16 行进行了相应的预处理判断。
|
|
|
|
|
|
接下来,在代码的第 7 行,我们使用 C11 新引入的 `_Atomic` 关键字,修饰了原有的全局变量 counter,以将它定义为一个原子类型(这里也可以直接使用 C 标准库为我们封装好的宏 atomic\_long)。
|
|
|
|
|
|
紧接着,在 run 函数内部,代码的第 11 行,我们使用名为 atomic\_fetch\_add\_explicit 的函数来完成对 counter 变量的累加过程。该函数为我们提供了一种原子累加操作,可以使线程在进行数据累加时独占整个变量。除此之外,你还需要注意:通过该函数的第三个参数,我们还可以指定当前操作需要满足的内存顺序。
|
|
|
|
|
|
在上一讲中我提到,由于编译器和处理器可能会采用指令重排来优化程序的运行效率,因此,当在多核 CPU 上运行存在线程间数据依赖的多线程应用时,程序的正确性可能会出现问题。那么,怎样解决这个问题呢?我们来看下面这段代码。这里,我通过指定各个原子操作的具体内存顺序,修复了上一讲最后一小节中提到的例子。
|
|
|
|
|
|
```c++
|
|
|
#include <threads.h>
|
|
|
#include <stdio.h>
|
|
|
#include <stdatomic.h>
|
|
|
#if !defined(__STDC_NO_ATOMICS__)
|
|
|
atomic_int x = 0, y = 0;
|
|
|
#endif
|
|
|
int run(void* v) {
|
|
|
atomic_store_explicit(&x, 10, memory_order_relaxed);
|
|
|
atomic_store_explicit(&y, 20, memory_order_release);
|
|
|
}
|
|
|
int observe(void* v) {
|
|
|
while(atomic_load_explicit(&y, memory_order_acquire) != 20);
|
|
|
printf("%d", atomic_load_explicit(&x, memory_order_relaxed));
|
|
|
}
|
|
|
int main(void) {
|
|
|
#if !defined(__STDC_NO_THREADS__) || !defined(__STDC_NO_ATOMICS__)
|
|
|
thrd_t threadA, threadB;
|
|
|
thrd_create(&threadA, run, NULL);
|
|
|
thrd_create(&threadB, observe, NULL);
|
|
|
thrd_join(threadA, NULL);
|
|
|
thrd_join(threadB, NULL);
|
|
|
#endif
|
|
|
return 0;
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
可以看到,我们修改了线程 run 和 observe 中对原子类型变量 x 和 y 的读写操作。其中,函数 atomic\_load\_explicit 用来读取某个原子类型变量的值;而对它们的修改,则使用函数 atomic\_store\_explicit 进行。除此之外,这两个函数都支持通过它们的最后一个参数,来指定相应操作需要遵循的内存顺序。
|
|
|
|
|
|
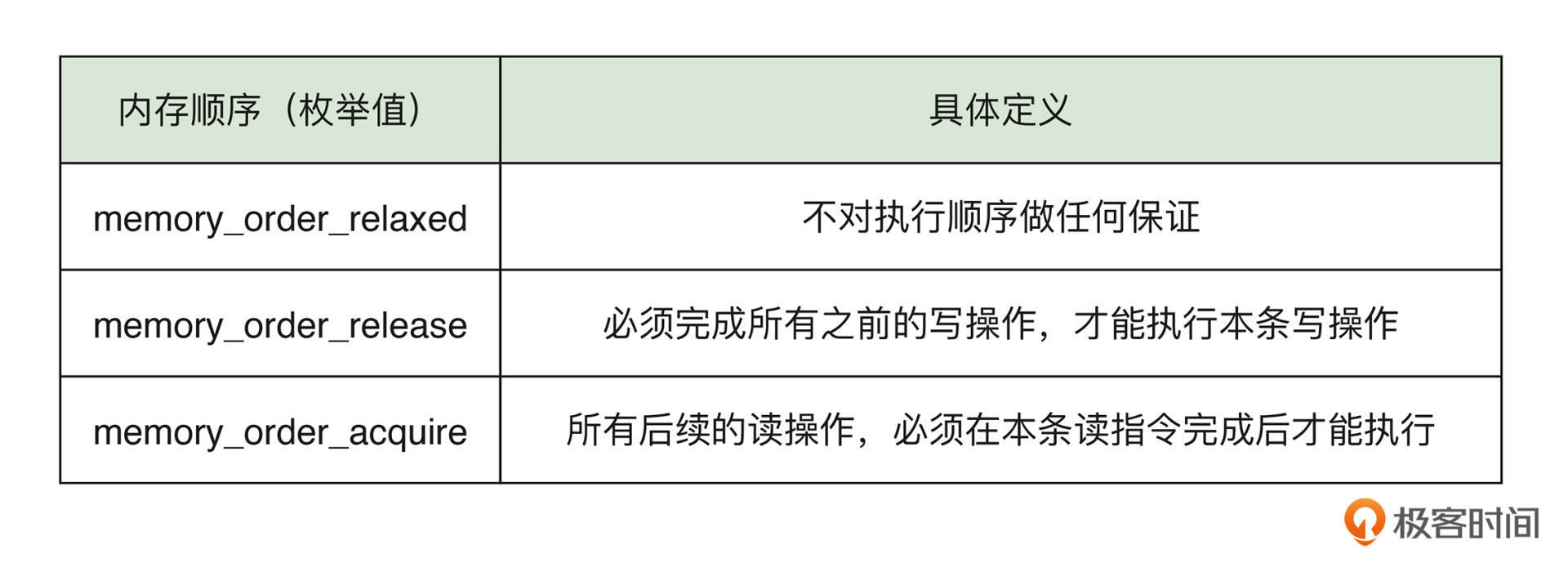
在这段修改后的代码中,一共使用到了三种不同的内存顺序(对应三个枚举值)。首先,我们来看看它们的具体定义。为了方便你观察,我将这些信息整理在了下面的表格中。
|
|
|
|
|
|
|
|
|
|
|
|
相信看过这三种内存顺序的定义后,你已经对它们的作用有个大致了解了。其中,对于使用了 memory\_order\_relaxed 的操作,我们并不需要对它们的执行顺序做任何保证。相反,编译器和处理器可以按照需求进行适当的优化。
|
|
|
|
|
|
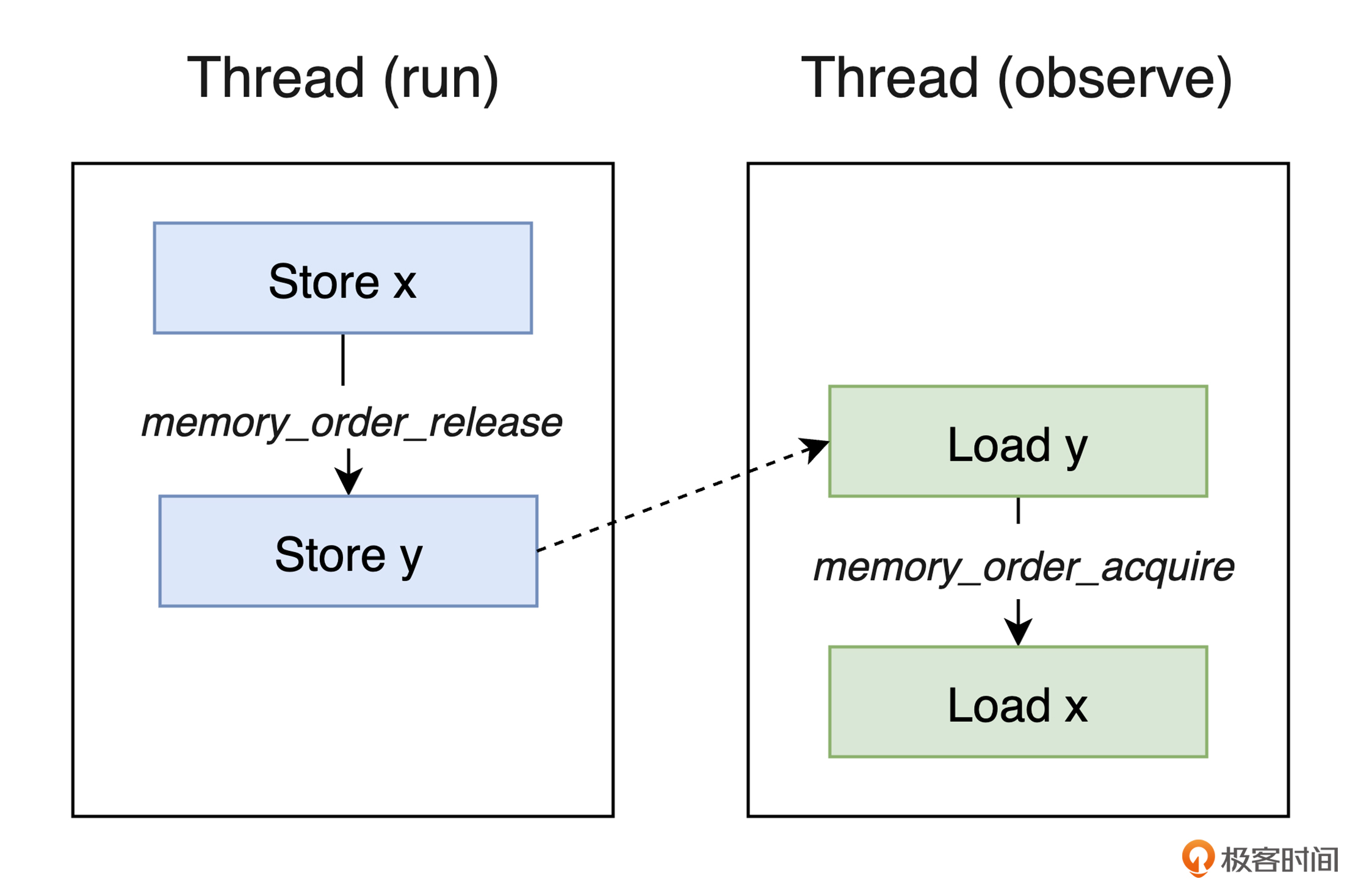
而在 run 线程中,为了保证对变量 x 的修改过程一定发生在变量 y 的值被修改前,我们便需要使用 memory\_order\_release 来限制对变量 y 的修改,一定要在之前的所有修改都完成后再进行。同样地,对于 observe 线程来说,为了防止处理器提前将变量 x 的值放入缓存,这里,我们也需要通过 memory\_order\_acquire,来保证对变量 y 进行的读操作一定会比对变量 x 的读操作先发生。你可以通过下面这张图片,直观地理解上面我们提到的各个操作之间的执行关系。
|
|
|
|
|
|
|
|
|
|
|
|
除了我们在上面的例子中用到的三种内存顺序外,C 语言还提供了另外 3 种不同的内存顺序,供我们在不同的场景中使用。如果想了解关于它们的更多信息,你可以参考[这个链接](https://en.cppreference.com/w/c/atomic/memory_order)。
|
|
|
|
|
|
总的来看,C11 通过 stdatomic.h 头文件为我们提供了大量可用于原子操作的相关类型、宏,以及函数。相较于使用互斥量,原子操作可以让我们更加清晰和方便地抽象并行代码,而不需要频繁进行加锁与释放锁的操作。
|
|
|
|
|
|
不仅如此,从执行性能角度,原子操作的执行通常直接依赖于 CPU 提供的相应的原子机器指令,比如在 x86-64 平台上,atomic\_fetch\_add\_explicit 函数对应的 `lock add` 指令。而使用互斥量则需要让线程阻塞,还要频繁进行上下文切换,因此与之相比,原子操作的性能通常会更好。
|
|
|
|
|
|
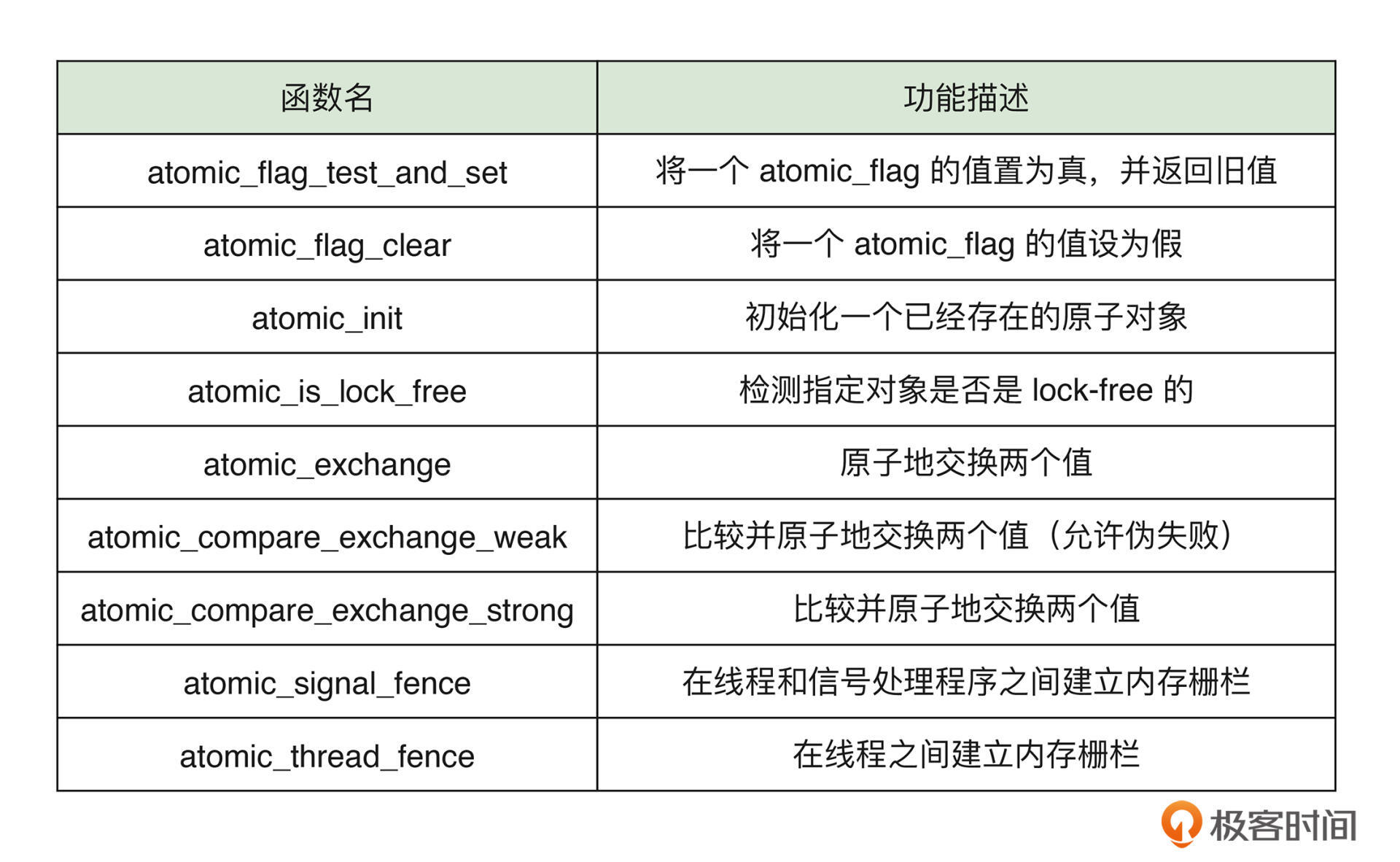
这里,我将一些与原子操作相关的常用标准库函数整理在了下面的表格中,供你参考。你也可以点击[这个链接](https://en.cppreference.com/w/c/atomic),查看更多信息。
|
|
|
|
|
|
|
|
|
|
|
|
## 使用条件变量
|
|
|
|
|
|
条件变量是一种常用的线程同步机制。通过上一小节的例子,你会发现,在多线程应用中,存在着一种十分常见的线程间同步模式,即某个线程的执行依赖于另一个线程对数据首先进行的预处理。在上面的例子中,observe 线程中某段逻辑的执行需要等待 run 线程将原子变量 y 的值变为 20。这里,我们通过“忙等待(Busy Waiting)”的方式实现了这个效果。
|
|
|
|
|
|
用忙等待虽然可以达到我们的预期,但这是一种十分“昂贵”的方式,甚至会被认为是一种反模式,应该避免使用。这是因为,忙等待需要让线程反复检查某个条件是否为真,因此,需要浪费大量宝贵的 CPU 资源在无用的活动上。那么,有没有更好的办法,既可以尽量减少处理器资源的浪费,又能够解决线程间数据依赖的问题呢?答案是有的,这个方法就是使用条件变量。
|
|
|
|
|
|
来看下面这个例子:
|
|
|
|
|
|
```c++
|
|
|
#include <threads.h>
|
|
|
#include <stdio.h>
|
|
|
mtx_t mutex;
|
|
|
cnd_t cond; // 定义一个条件变量;
|
|
|
int done = 0;
|
|
|
int run(void* data) {
|
|
|
mtx_lock(&mutex);
|
|
|
done = 1;
|
|
|
cnd_signal(&cond); // 通知等待中的线程;
|
|
|
mtx_unlock(&mutex);
|
|
|
return thrd_success;
|
|
|
}
|
|
|
int main(void) {
|
|
|
#ifndef __STDC_NO_THREADS__
|
|
|
mtx_init(&mutex, mtx_plain);
|
|
|
cnd_init(&cond); // 初始化条件变量;
|
|
|
thrd_t thread;
|
|
|
thrd_create(&thread, run, NULL);
|
|
|
mtx_lock(&mutex);
|
|
|
while (done == 0) {
|
|
|
cnd_wait(&cond, &mutex); // 让当前线程进入等待队列;
|
|
|
}
|
|
|
mtx_unlock(&mutex);
|
|
|
printf("The value of done is: %d", done);
|
|
|
mtx_destroy(&mutex);
|
|
|
cnd_destroy(&cond); // 销毁条件变量;
|
|
|
#endif
|
|
|
return 0;
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
这段代码的基本逻辑与上一小节的例子类似。从第 23 行开始的代码,执行前需要等待 run 线程首先将全局变量 done 的值修改为 1。代码的第 15~16 行,我们初始化了需要使用的互斥量对象与条件变量对象。在 main 线程对应代码的第 19~23 行,我们使用了与条件变量相关的函数 cnd\_wait。该函数在被调用时,需要当前线程获得一个互斥锁,并将其作为实参传递给它,函数调用后锁会被释放。同时,所有执行到此处的线程都将被阻塞。
|
|
|
|
|
|
接下来,让我们把目光移到 run 线程。
|
|
|
|
|
|
在 run 线程代码的第 8 行,我们将变量 done 的值修改为 1。紧接着,通过调用函数 cnd\_signal,run 线程得以“通知”所有之前被阻塞在函数 cnd\_wait 处的线程,来让它们中的一个可以继续运行。当然,在这个例子中,我们只有 main 函数对应的一个线程。此时,互斥量将被重新上锁,main 线程将继续执行接下来的指令。在代码的第 24~26 行,它打印出了全局变量 done 的值,并销毁了互斥量与条件变量对象。最后,程序执行完毕。
|
|
|
|
|
|
可以看到,实际上,**条件变量为我****们****提供了一种线程间的“通知”能力**。某个线程可以在完成了某件事情后,通知并唤醒等待线程,让其继续工作,完成接下来的任务。而在这个过程中,我们不需要通过忙等待的方式,让线程频繁查询标志量。因此,CPU 资源得到了更好的利用。
|
|
|
|
|
|
这里,我向你提一个小问题:为什么我们在代码的第 20 行使用 `while` 语句,而不是 `if` 语句呢?欢迎在评论区告诉我你的答案。
|
|
|
|
|
|
在并发编程中,条件变量是一个十分强大的武器。通过它,我们可以进一步实现监视器(Monitor)、管程等工具和同步原语。而且,它也可以很好地解决经典的生产者-消费者问题。如果你对这部分内容感兴趣,可以参考《C++ Concurrency in Action》和《现代操作系统》等书,来进行更加深入的学习。虽然它们并不会专门介绍基于 C 语言的并发编程,但其中的很多概念,甚至 C++ 接口,与 C 语言都是类似和相通的。
|
|
|
|
|
|
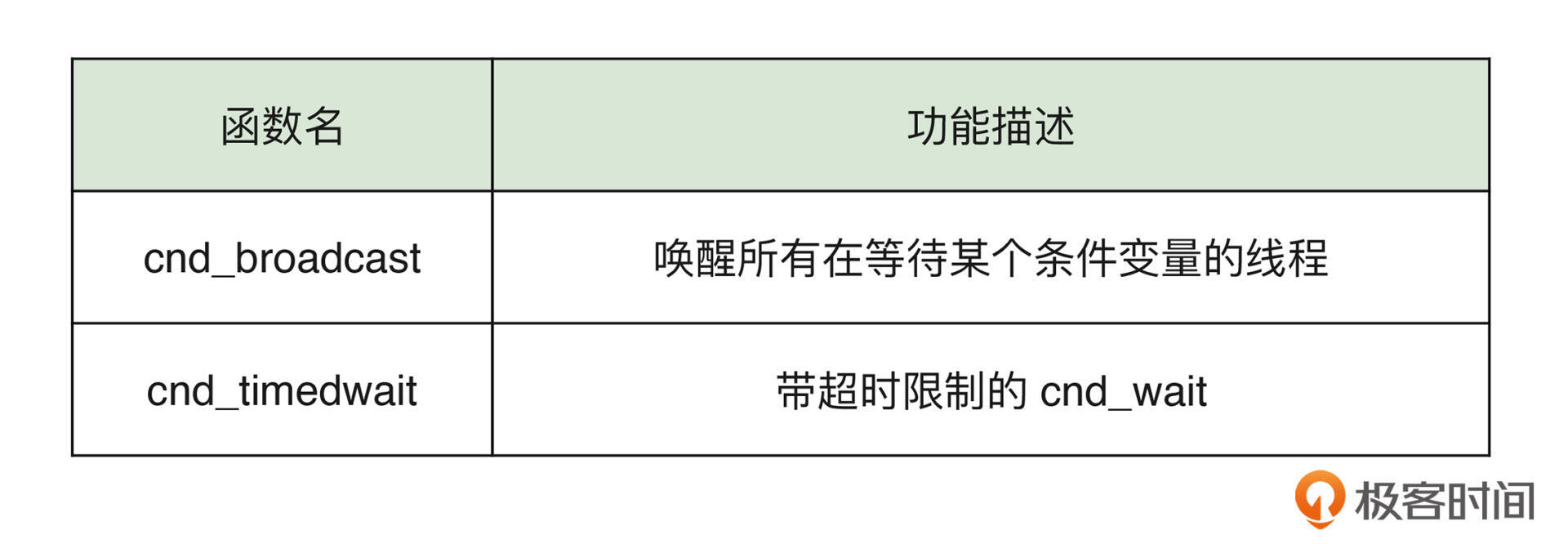
除了上述代码中用到的条件变量方法外,C 标准库还提供了另外两个常用函数。我将它们整理在了下面的表格中,供你参考。
|
|
|
|
|
|
|
|
|
|
|
|
最后,让我们再回过头来,看看与线程直接相关的另一个内容,线程本地变量。
|
|
|
|
|
|
## 使用线程本地变量
|
|
|
|
|
|
除了可以共享存在于进程内的全局变量外,线程还可以拥有属于它自己的线程本地变量(TLS)。
|
|
|
|
|
|
顾名思义,线程本地变量的值仅能够在某个具体线程的生存期内可用。变量的实际存储空间会在线程开始时分配,线程结束时回收。线程不会对这些变量的读写操作产生数据竞争。我们来看一个例子:
|
|
|
|
|
|
```c++
|
|
|
#include <stdio.h>
|
|
|
#include <threads.h>
|
|
|
#include <stdatomic.h>
|
|
|
#define THREAD_COUNT 10
|
|
|
#define THREAD_LOOP 10000
|
|
|
_Thread_local int counter = 0; // 定义线程本地变量;
|
|
|
int run(void *data) {
|
|
|
for (int i = 0; i < THREAD_LOOP; ++i)
|
|
|
counter += 1; // 更新当前线程所属的 counter 变量值;
|
|
|
return counter;
|
|
|
}
|
|
|
int main(int argc, char const *argv[]) {
|
|
|
thrd_t threads[THREAD_COUNT];
|
|
|
int sum = 0, result = 0;
|
|
|
for (int i = 0; i < THREAD_COUNT; ++i)
|
|
|
thrd_create(&threads[i], run, NULL);
|
|
|
for (int i = 0; i < THREAD_COUNT; ++i) {
|
|
|
thrd_join(threads[i], &result);
|
|
|
sum += result; // 累加每个线程的计算值;
|
|
|
}
|
|
|
printf("The value of count is %d.\n", sum);
|
|
|
return 0;
|
|
|
}
|
|
|
|
|
|
```
|
|
|
|
|
|
可以看到,这段代码的逻辑十分简单:我们创建了 10 个(对应 THREAD\_COUNT)线程,让它们同时对全局变量 counter 进行累加,并持续 10000 次(对应 THREAD\_LOOP)。然后,在 main 线程的最后,我们将累加后的值打印了出来。
|
|
|
|
|
|
看到这里,相信你的第一感觉肯定是:应该通过互斥锁或原子操作等方式,来防止多个线程在对 counter 变量进行修改时产生数据竞争。但在这里,我却没有这样做,而是采用了一种更加便捷的方式。这一切,都要得益于线程本地变量的存在。
|
|
|
|
|
|
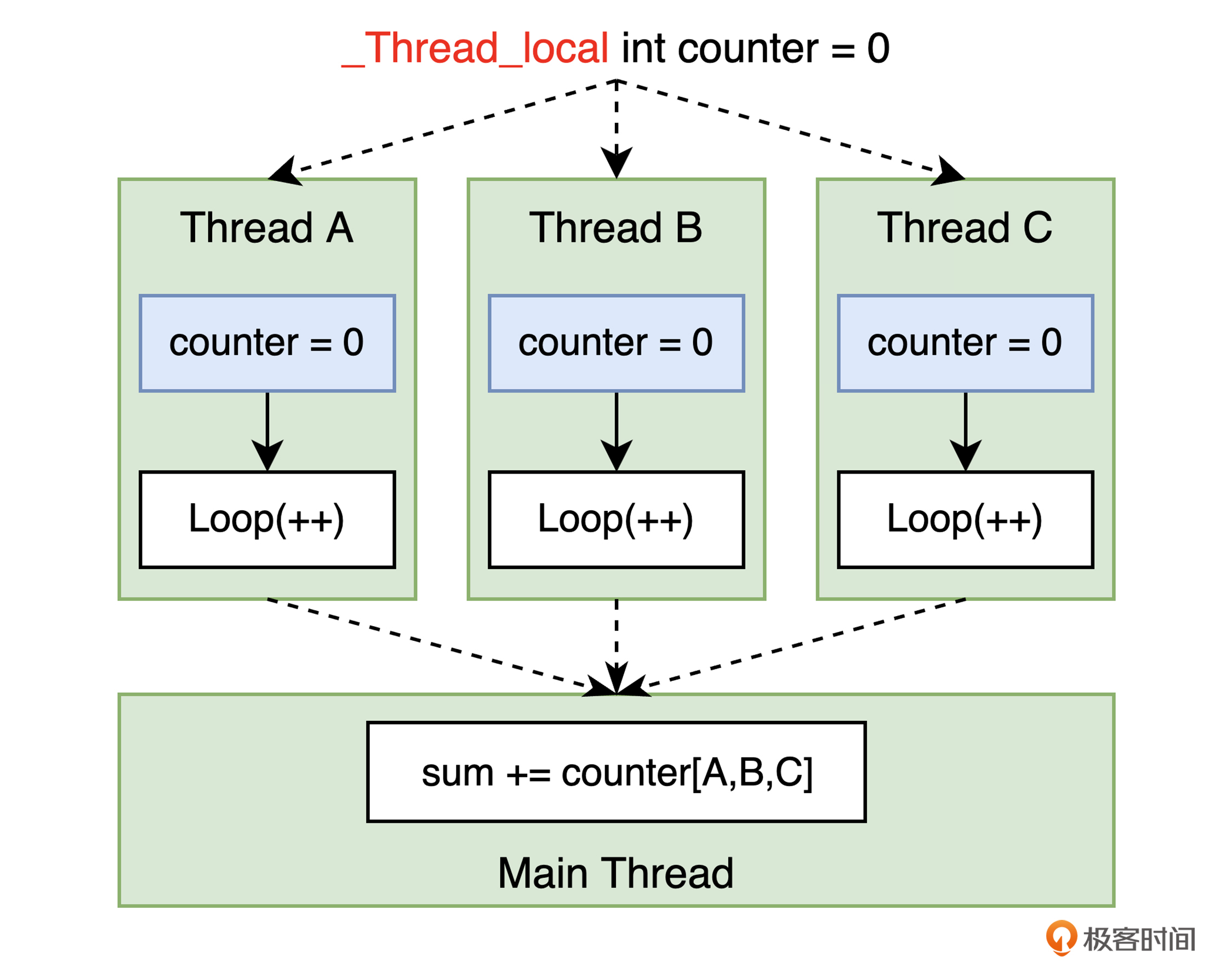
在代码的第 6 行,我们使用 `_Thread_local` 关键字(也可以使用宏 thread\_local),将全局变量 counter 标记为线程本地变量。这意味着,每个线程都会在创建时生成仅属于当前线程的变量 counter。因此,当本线程在对 counter 变量进行累加时,便不会受到其他线程的影响。而当线程退出时,通过代码第 18 行的 thrd\_join,我们得以在 main 线程中将每个结束线程返回的,各自的 counter 值再进行统一累加,从而得到最后的计算结果。你可以通过下图来直观地理解这个过程。
|
|
|
|
|
|
|
|
|
|
|
|
总之,线程本地变量为我们提供了另一种可以避免数据竞争的方式。除此之外,它也可以被用来存储线程独有的一些信息,比如 errno 的值。
|
|
|
|
|
|
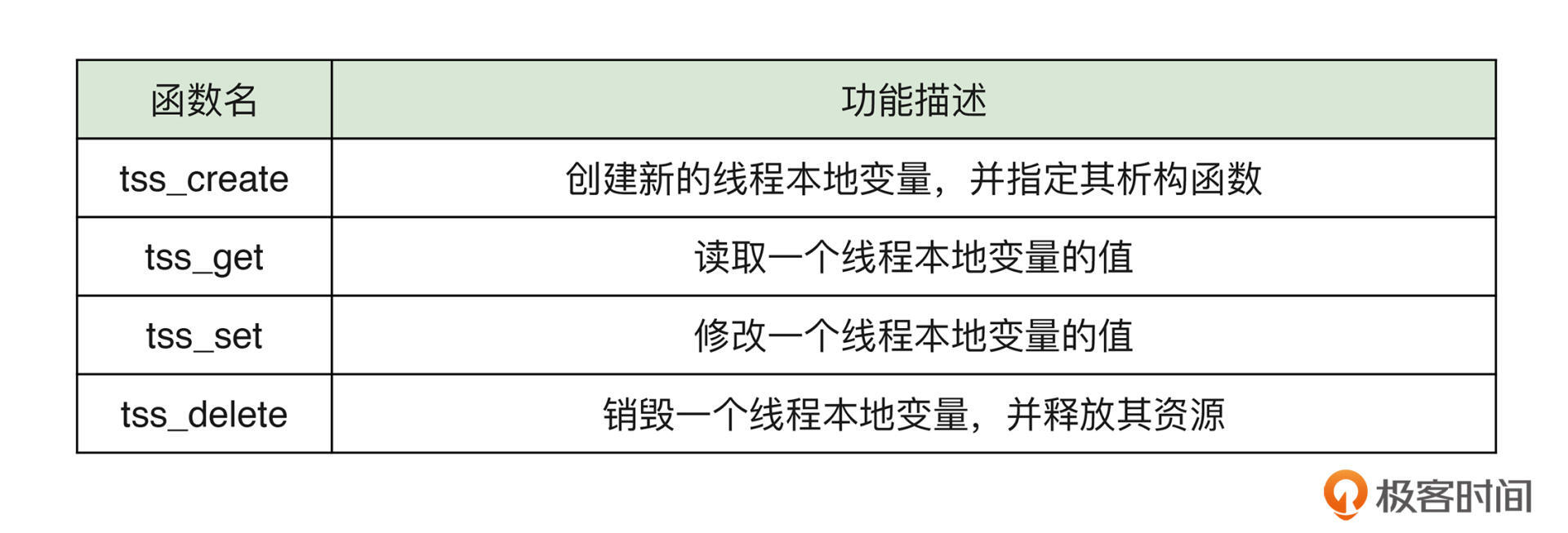
我们在上面代码中使用的是**以关键字来定义线程本地变量的方式**,除此之外,标准库还提供了一系列的函数,可以实现同样的目的。但不同之处在于,通过 tss\_create 等函数来创建线程本地变量时,还可以为其指定对应的析构函数。这样,当线程退出时,便可以确保相应的线程本地资源(比如堆内存)能够以正确的方式被清理。这里,我将相关的函数列在了下面的表格中,供你参考。你也可以点击[这个链接](https://en.cppreference.com/w/c/atomic)查看更多信息。
|
|
|
|
|
|
|
|
|
|
|
|
## 总结
|
|
|
|
|
|
好了,讲到这里,今天的内容也就基本结束了。最后我来给你总结一下。
|
|
|
|
|
|
在本讲中,我主要介绍了有关互斥量、原子操作、条件变量,以及线程本地变量的相关内容。合理地使用这些方式,我们就可以避免多线程应用经常会遇到的,由于数据竞争、竞态条件,以及指令重排引起的问题。
|
|
|
|
|
|
其中,互斥量让我们可以通过对它进行**加锁与解锁**的方式,来限制多个线程的执行,以让它们有序地使用共享资源。在 C 语言中,互斥量被分为三种类型,mtx\_plain 为最基本类型,mtx\_recursive 可以被用在需要重复加锁的场景中,而 mtx\_timed 则使得互斥量具有了超时属性。通过与 mtx\_timedlock 结合使用,它可以让线程在给互斥量加锁时,只尝试有限的一段时间。
|
|
|
|
|
|
原子操作是一种更便捷的可以用来避免数据竞争的方式。通过使用 `_Atomic` 关键字,我们可以将变量定义为原子类型。而当线程访问该类型变量时,便可**按照“不可分割”的形式,一次性完成整个操作**。不仅如此,在进行原子操作时,还可以同时指定操作需要满足的内存顺序。原子操作的实现通常依赖于所在平台的特殊机器指令,而 C 标准库则通过直接提供常用同步原语的方式,帮我们屏蔽了这些细节。
|
|
|
|
|
|
**条件变量提供了线程间的通知能力。**它可以让线程在完成某件事情后,通知需要进行后续处理的等待线程,从而让具有数据依赖关系的线程以一种更加高效的方式进行同步。除此之外,条件变量还可被用于实现监视器、管程等更多复杂的同步机制。
|
|
|
|
|
|
最后,线程本地变量也是一种可用于解决数据竞争的常用方式。具体的操作是在 C 代码中,为全局变量添加 `_Thread_local` 关键字。**这样,就会仅在线程创建时,才生成仅属于当前线程的本地同名变量。** 因此,当前线程对该变量的修改便不会被其他线程影响。
|
|
|
|
|
|
## 思考题
|
|
|
|
|
|
x86-64 指令集中的 mfence、lfence 与 sfence 指令,它们具体有什么作用呢?试着查找资料了解一下,并在评论区分享你的发现。
|
|
|
|
|
|
今天的课程到这里就结束了,希望可以帮助到你,也希望你在下方的留言区和我一起讨论。同时,欢迎你把这节课分享给你的朋友或同事,我们一起交流。
|
|
|
|