|
|
# 23|事务(二):原子性,对应用层提供的完美抽象
|
|
|
|
|
|
你好,我是陈现麟。
|
|
|
|
|
|
通过上节课的学习,我们理解了事务的一致性的定义,并且知道了事务一致性的实现,是通过底层存储的多副本数据强一致性,事务的原子性、隔离性和持久性一起协作,以及数据库层和应用层的约束检测等各方面来保障的,那么本节课,我们就继续来讨论事务中,另一个非常重要的特性:原子性。我们从原子性的定义出发,一起分析在分布式系统中,原子性的实现方法,最后再对原子性的关键问题进行讨论。
|
|
|
|
|
|
当我们对事务的原子性进行讨论和学习后,你就能明白原子性是一个非常完美的抽象,因为它对应用程序,屏蔽了分布式系统中部分失败的问题,这可以大大减少我们在编程时的心智负担。
|
|
|
|
|
|
## 原子性的定义
|
|
|
|
|
|
一般来说,我们在计算机领域第一次接触“原子”这一概念,都来源于操作系统的“原子操作”。在操作系统中,原子操作的定义是指,不可被中断的一个或者一系列操作,它包含了两个层面的意思。
|
|
|
|
|
|
首先,是**整体的不可分割性**。一个原子操作的所有操作,要么全部执行,要么就一个都不执行,即 all-or-nothing 。
|
|
|
|
|
|
其次,是**可串行化的隔离性,即线程安全**。原子操作是在单核 CPU 时代定义的,由于原子操作是不可中断的,那么系统在执行原子操作的过程中,唯一的 CPU 就被占用了,这就确保了原子操作的临界区,不会出现竞争的情况。原子操作自带了线程安全的保证,即最严格的隔离级别的可串行化,所以我们在编程的时候,就不需要对原子操作加锁,来保护它的临界区了。
|
|
|
|
|
|
但是,我们上节课提到了事务中原子性的定义,一个事务所有的操作,要么全部执行,要么就一个都不执行,即 all-or-nothing 。它可以让事务在执行的过程中,当遇到故障等原因,不能全部执行成功的时候,将已经执行的操作,回滚到事务前的状态。
|
|
|
|
|
|
你会发现事务中对原子性的定义,只保留了原子操作的不可分割性,并没有关注可串行化的隔离性。其实这也很好理解,主要是基于性能的考虑,如果事务的原子性同时定义了不可分割性和可串行化的隔离性,那么对数据库性能的影响将会非常大,因为数据库需要频繁地操作,相对于内存来说非常慢的磁盘,而可串行化地去操作磁盘,在很多业务场景下的性能是我们不可以接受的。
|
|
|
|
|
|
因此,**在事务的定义中,就将原子操作的不可分割性和隔离性,分别定义出了两个特性,即原子性和隔离性**。其中隔离性为了在性能和正确性之间权衡,定义了多种隔离级别,我们可以依据自己的业务情况进行选择,具体的隔离性讨论,我们将在下一节课进行。
|
|
|
|
|
|
## 怎么实现原子性
|
|
|
|
|
|
通过上面的讨论,我们知道了事务的原子性只关注整体的不可分割性,一个事务所有的操作,要么全部执行,要么就一个都不执行。那么我们应该如何实现事务的原子性呢?
|
|
|
|
|
|
从不可分割性的角度来思考,实现一个事务需要解决两个维度上的操作分割:
|
|
|
|
|
|
**第一个维度是单节点事务,即单节点上操作的不可分割性**。在单节点上,一个事务在执行的过程中出现崩溃等问题,它的一部分操作已经执行完成,而另一部分操作则无法继续执行,这时就会出现整个事务操作无法继续完成,仅仅部分操作完成的情况。
|
|
|
|
|
|
**第二个维度是分布式事务,即多节点之间的操作不可分割性**。在多节点上,一个事务操作需要在多个节点上运行,如果某些节点检测到违反约束、冲突、网络故障或者崩溃等问题,事务将无法继续执行,而其他节点的事务却已经顺利完成了,这时就会出现部分节点操作完成的情况。
|
|
|
|
|
|
下面我们就从单节点事务和分布式事务的维度,来一一讨论事务原子性的实现。
|
|
|
|
|
|
### 单节点事务
|
|
|
|
|
|
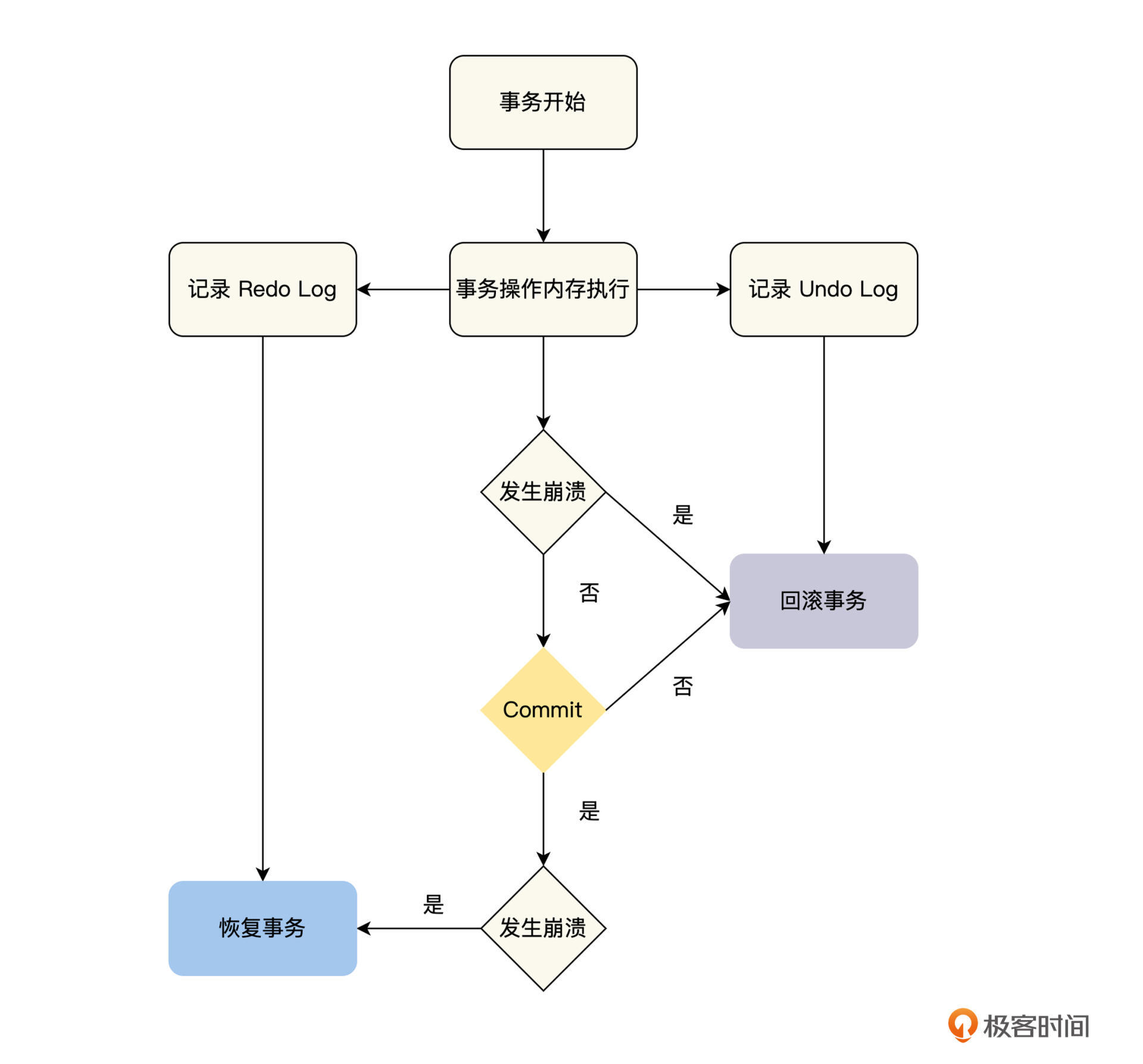
对于单节点上运行的事务(单节点事务)来说,在执行过程中,不需要与其他的节点交互,也就不会出现部分节点失败导致的操作分割,我们只需要考虑当前节点整体失败导致的操作分割即可。对于单节点事务,一般是在存储引擎上,通过 Undo Log 、 Redo Log 和 Commit 记录来实现,具体流程如下图。
|
|
|
|
|
|
|
|
|
|
|
|
我们从图中不难看出,对于单节点事务来说,一个非常关键的顺序就是在磁盘上持久化数据的顺序:先写入 Undo Log 和 Redo Log ,然后再写入 Commit 记录。其中事务的提交或中止由 Commit 记录来决定,如果在写入 Commit 记录之前发生崩溃,那么事务就需要中止,通过 Undo Log 回滚已执行的操作;如果事务已经写入了 Commit 记录,就表明事务已经安全提交,后面发生了崩溃的话,就要等待系统重启后,通过 Redo Log 恢复事务,然后再提交。
|
|
|
|
|
|
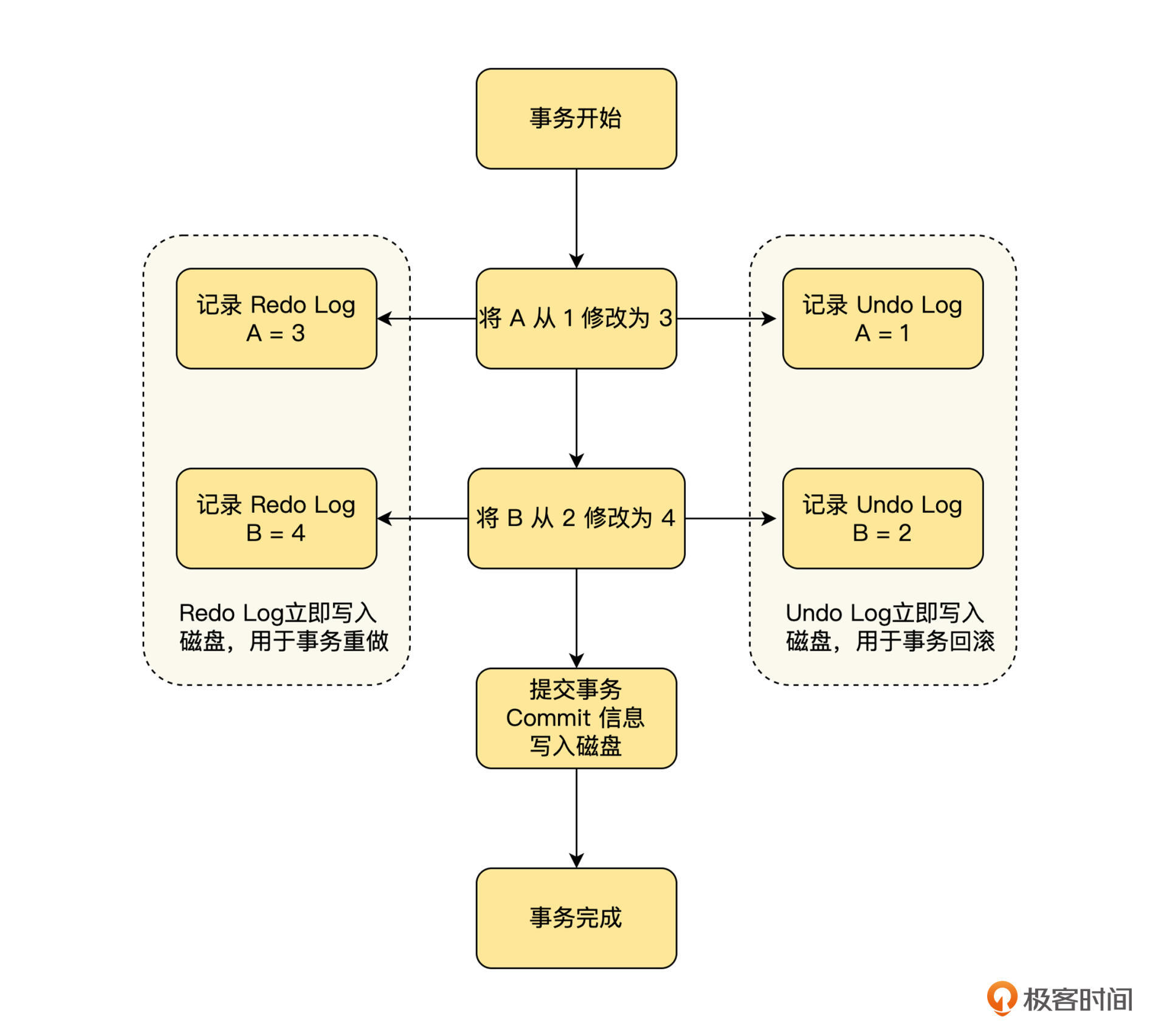
接下来,我们通过举例来简单描述下这个过程,注意这里简化了 Undo Log 和 Redo Log 的格式。假设一个事务操作 A、B 两个数据,他们的初值分别为 1 和 2 ,事务的操作内容为将 A 修改为 3 ,B 修改为 4 ,那么事务的执行流程如下图。
|
|
|
|
|
|
|
|
|
|
|
|
通过这些讨论,我们可以看出, **Redo Log 保证了事务的持久性, Undo Log 保证了事务的原子性,而写入 Commit 记录了事务的提交点**,它来决定事务是否应该安全提交。通过提交点,我们就可以将事务中多个操作的提交,绑定在一个提交点上,实现事务的原子提交。
|
|
|
|
|
|
### 分布式事务
|
|
|
|
|
|
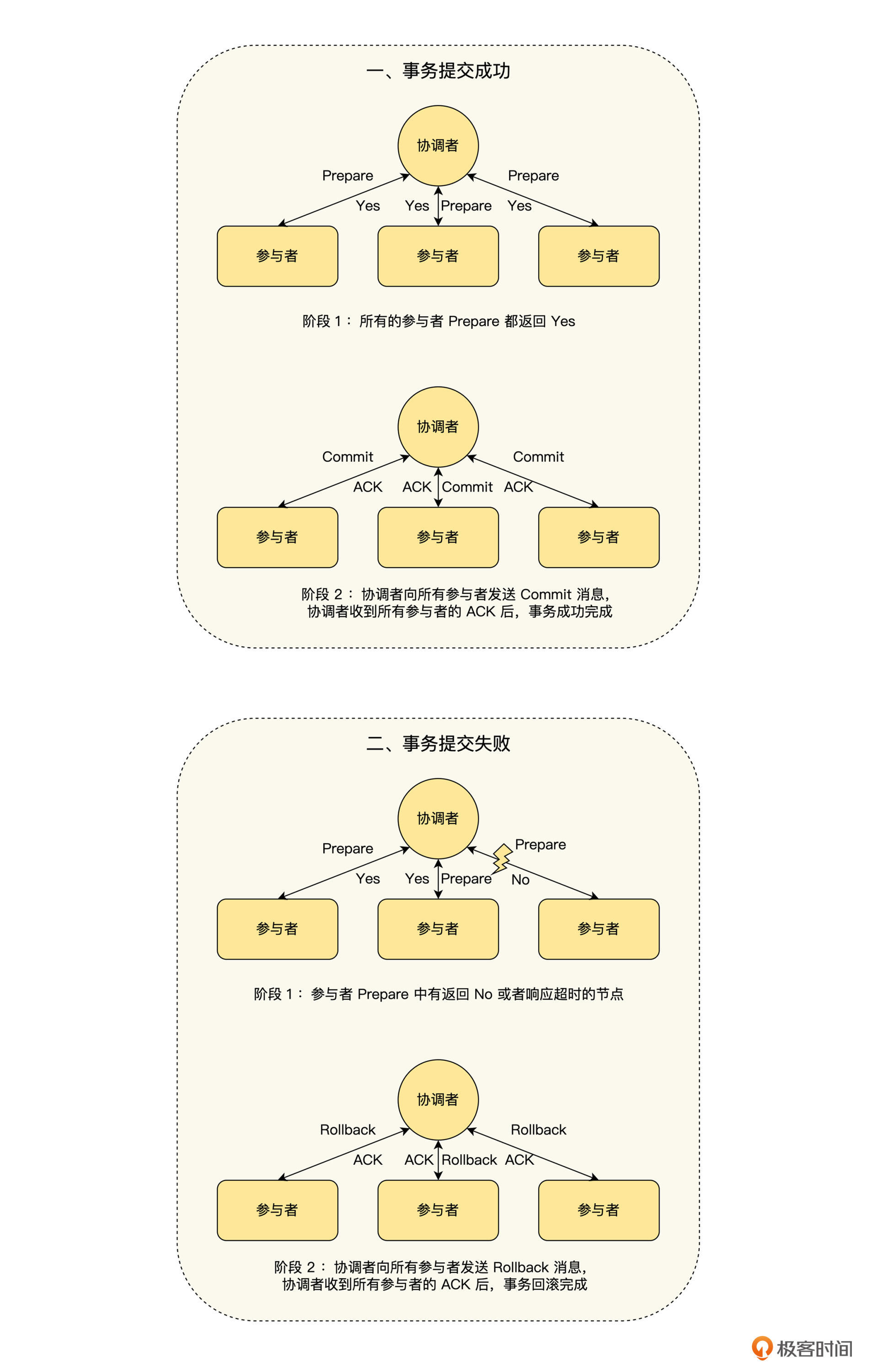
对于多节点上运行的事务(分布式事务)来说,除了当前节点整体失败导致的操作分割之外,还存在部分节点失败导致的操作分割。我们知道当前节点整体失败导致的操作分割,可以按单节点事务来处理,而对于部分节点失败导致的操作分割,一个常见的思路是通过两阶段提交( 2PC )来解决,实现 2PC 的思路如下图所示。
|
|
|
|
|
|
|
|
|
|
|
|
* 选择一个协调者,这个协调者可以是分布式事务的参与节点,也可以是一个单独的进程。
|
|
|
* 阶段 1
|
|
|
* 协调者发送事务请求(Prepare)到所有的参与节点,并询问它们是否可以提交。
|
|
|
* 如果所有的参与节点都回复“是”,那么接下来协调者在阶段 2 发出提交(Commit)请求。
|
|
|
* 如果任何的参与节点都回复“否”,那么接下来协调者在阶段 2 发出放弃(Rollback)请求。
|
|
|
* 阶段 2
|
|
|
* 依据阶段 1 返回的结果,决定事务最终是提交(Commit)还是放弃(Rollback)。
|
|
|
|
|
|
关于 2PC ,在实现的时候,要特别注意 2 个关键点。
|
|
|
|
|
|
一是,**两个关键承诺**。第一个承诺在阶段 1 ,当事务的参与节点回复“是”的时候,对于当前事务,这个参与节点一定是能够安全提交的,它不仅要保障事务在提交时,不会出现冲突和约束违规之类的问题,还要保障即使出现系统崩溃、电源故障和磁盘空间不足等系统问题时,事务依然能够正常提交成功。
|
|
|
|
|
|
第二个承诺在阶段 2 ,当协调者基于参与者的投票,做出提交或者中止的决定后,这个决定是不可以撤销的。对于协调者来说,如果协调者通知参与者失败,那么协调者必须一直重试,直到所有的参与节点都通知成功为止;而对于参与者来说,不论协调者通知的结果是提交还是中止,参与者都必须严格执行,不能反悔。即使出现了故障,在故障恢复后,还是必须要执行,直到成功为止。
|
|
|
|
|
|
第二个关键点是**2PC 的提交点**。当协调者通过参与者的投票,做出提交或者中止事务的决定后,需要先将决定写入事务日志,然后再通知事务的参与者。如果协调者在事务执行过程中崩溃了,那么等到协调者恢复后,在事务日志中如果没有发现未解决的事务,就中止事务;反之,就会继续执行事务。
|
|
|
|
|
|
所以,协调者将阶段 1 的决定写入事务日志就是 2PC 中事务的提交点,通过这个提交点,将多个节点的事务操作绑定在一个提交点上,然后像单节点事务一样,利用这个提交点来保证事务的原子性。
|
|
|
|
|
|
## 2PC 面临的问题
|
|
|
|
|
|
通过上面的讨论,我们知道了 2PC 可以解决分布式事务的原子性问题,但是要正确使用 2PC,还需要了解以下几个方面的问题。
|
|
|
|
|
|
第一,**2PC 是一个阻塞式协议**。当 2PC 的一个参与者,在阶段 1 做出了“是”的回复后,参与者将不能单方面放弃,它必须等待协调者的决定,也就意味着参与者所有占用的资源都不能释放。如果协调者出现故障,不能将决定通知给参与者,那么这个参与者只能无限等待,直到协调者恢复后,成功收到协调者的决定为止。
|
|
|
|
|
|
因为 2PC 有阻塞问题,所以后来又提出了**3PC 协议,它在 2PC 的两个阶段之间插入了一个阶段,增加了一个相互协商的过程,并且还引入了超时机制来防止阻塞**。虽然 3PC 能解决 2PC 由于协调者崩溃而无限等待的问题,但是它却有着超高的延迟,并且在网络分区时,还可能会出现不一致的问题,这些原因导致它在实际应用中的效果并不好,所以目前普遍使用的依然是 2PC 。
|
|
|
|
|
|
第二, **2PC 是一个逆可用性协议**。如果在阶段 1 ,任何一个参与者发生故障,使准备请求失败或者超时,协调者都将中止操作;如果在阶段 2 ,协调者发生故障,也会导致参与者只能等待,无法完成操作。
|
|
|
|
|
|
你是否感觉很奇怪,同样是共识算法,Raft 和 Paxos 等共识算法都能容忍少数节点失败的情况,那为什么 2PC 则完全不能容忍节点的失败呢?**其实,这个差异的出现是因为 2PC 是一个原子提交协议,为了 all-or-nothing ,在操作过程中就需要与所有的节点达成共识**;而 Raft 和 Paxos 则只需要与大部分节点达成一致,确保共识成立即可,它可以容忍少数节点不可用,当故障恢复的时候,之前不可用的节点可以向其他正常的节点同步之前达成的共识。
|
|
|
|
|
|
第三,虽然 2PC 能保证事务的原子性,即一个事务所有的操作,要么都成功,要么都失败,**但是它并不能保证多个节点的事务操作会同时提交**。如果没有同时提交,即一部分节点已经提交成功,而另一部分节点还没有提交的时候,就将使事务的可见性出现问题,这部分知识,我们将在课程“事务(三)”中继续讨论。
|
|
|
|
|
|
总而言之,虽然 2PC 在性能、可用性和可见性方面都存在问题,但是目前分布式事务中,使用最广泛的还是 2PC 。
|
|
|
|
|
|
## 总结
|
|
|
|
|
|
在这节课中,我们先讨论了原子性的定义,了解了事务的原子性,以及操作系统的原子操作是两个不同的概念,事务的原子性只要求 all-or-nothing ,而操作系统的原子操作除了要求 all-or-nothing 之外,还需要可串行化的隔离级别。
|
|
|
|
|
|
然后,我们从单节点事务和分布式事务的角度,讨论了如何实现事务的原子性。对于单节点事务来说,我们将事务的多个操作绑定到,事务提交信息写入的一个提交点上,如果提交信息写入成功,那么事务提交,否则事务回滚。
|
|
|
|
|
|
而对于分布式事务来说,它在单节点事务的基础上,进一步地要求事务的多个参与者做出两个关键承诺,第一个承诺在阶段 1 ,当事务的参与节点回复“是”的时候,该参与者是一定可以提交的;第二个承诺在阶段 2 ,当协调者基于参与者的投票,做出提交或者中止的决定后,这个决定是不可以撤销的。
|
|
|
|
|
|
最后,我们讨论了 2PC 在性能、可用性和可见性方面有着一些问题,但是 **2PC 依然是当前分布式事务场景中,使用最多的原子提交协议**。
|
|
|
|
|
|
## 思考题
|
|
|
|
|
|
在学习 2PC 协议的过程中,我们提到了 3PC 协议,它在 2PC 的两个阶段之间插入一个阶段,从而增加了一个相互协商的过程,并且还引入了超时机制来防止阻塞,你知道这是怎么做的吗?
|
|
|
|
|
|
欢迎你在留言区发表你的看法。如果这节课对你有帮助,也推荐你分享给更多的同事、朋友。
|
|
|
|