|
|
|
|
|
# 24 | 从哨兵Leader选举学习Raft协议实现(下)
|
|
|
|
|
|
|
|
|
|
|
|
你好,我是蒋德钧。
|
|
|
|
|
|
|
|
|
|
|
|
上节课,我给你介绍了Raft协议的基本流程,以及哨兵实例工作的基本过程。哨兵是通过serverCron函数的周期性执行,进而在serverCron中调用sentinelTimer函数,实现周期性处理哨兵相关的时间事件。而sentinelTimer函数处理的时间事件,就包括了对哨兵监听的每个主节点,它会通过调用sentinelHandleRedisInstance函数,来检查主节点的在线状态,并在主节点客观下线时进行故障切换。
|
|
|
|
|
|
|
|
|
|
|
|
另外,我还带你了解了sentinelHandleRedisInstance函数执行过程的前三步操作,分别是重连断连的实例、周期性给实例发送检测命令,检测实例是否主观下线,这也分别对应了sentinelReconnectInstance、sentinelSendPeriodicCommands和sentinelCheckSubjectivelyDown这三个函数,你可以再回顾下。
|
|
|
|
|
|
|
|
|
|
|
|
那么,今天这节课,我接着来给你介绍sentinelHandleRedisInstance函数执行过程中的剩余操作,分别是检测主节点是否客观下线、判断是否需要执行故障切换,以及需要故障切换时的哨兵Leader选举的具体过程。
|
|
|
|
|
|
|
|
|
|
|
|
学完这节课的内容,你就可以对哨兵工作的过程有个全面了解了。并且,你可以掌握如何在代码层面实现Raft协议来完成Leader选举。这样,当你日后在分布式系统中实现分布式共识时,这部分内容就能帮助指导你的代码设计与实现了。
|
|
|
|
|
|
|
|
|
|
|
|
接下来,我们先来看下主节点的客观下线判断。
|
|
|
|
|
|
|
|
|
|
|
|
## 主节点客观下线判断
|
|
|
|
|
|
|
|
|
|
|
|
现在我们知道,哨兵在sentinelHandleRedisInstance函数中会**调用sentinelCheckObjectivelyDown函数**(在sentinel.c文件中),来检测主节点是否客观下线。
|
|
|
|
|
|
|
|
|
|
|
|
而sentinelCheckObjectivelyDown函数在执行时,除了会检查当前哨兵对主节点主观下线的判断结果,还需要结合监听相同主节点的其他哨兵,对主节点主观下线的判断结果。它把这些判断结果综合起来,才能做出主节点客观下线的最终判断。
|
|
|
|
|
|
|
|
|
|
|
|
从代码实现层面来看,在哨兵用来记录主节点信息的**sentinelRedisInstance结构体**中,本身已经用哈希表保存了监听同一主节点的其他哨兵实例,如下所示:
|
|
|
|
|
|
|
|
|
|
|
|
```plain
|
|
|
|
|
|
typedef struct sentinelRedisInstance {
|
|
|
|
|
|
…
|
|
|
|
|
|
dict *sentinels;
|
|
|
|
|
|
…
|
|
|
|
|
|
}
|
|
|
|
|
|
|
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
|
|
这样一来,sentinelCheckObjectivelyDown函数通过遍历主节点记录的sentinels哈希表,就可以获取其他哨兵实例对同一主节点主观下线的判断结果。这也是因为,sentinels哈希表中保存的哨兵实例,它们同样使用了sentinelRedisInstance这个结构体,而这个结构体的成员变量flags,会记录哨兵对主节点主观下线的判断结果。
|
|
|
|
|
|
|
|
|
|
|
|
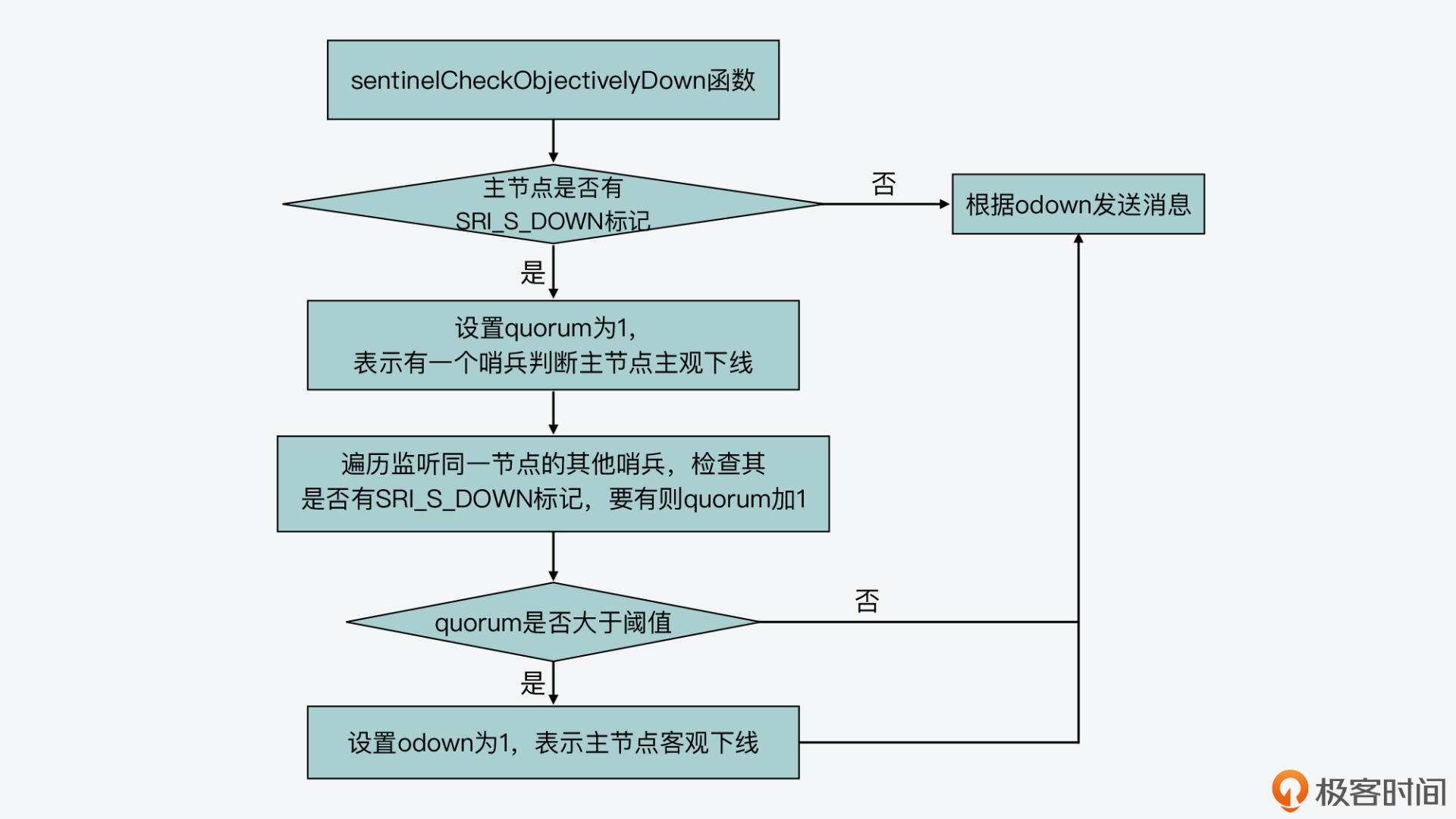
具体来说,sentinelCheckObjectivelyDown函数会**使用quorum变量,来记录判断主节点为主观下线的哨兵数量**。如果当前哨兵已经判断主节点为主观下线,那么它会先把quorum值置为1。然后,它会依次判断其他哨兵的flags变量,**检查是否设置了SRI\_MASTER\_DOWN的标记**。如果设置了,它就会把quorum值加1。
|
|
|
|
|
|
|
|
|
|
|
|
当遍历完sentinels哈希表后,sentinelCheckObjectivelyDown函数会判断quorum值是否大于等于预设定的quorum阈值,这个阈值保存在了主节点的数据结构中,也就是master->quorum,而这个阈值是在sentinel.conf配置文件中设置的。
|
|
|
|
|
|
|
|
|
|
|
|
如果实际的quorum值大于等于预设的quorum阈值,sentinelCheckObjectivelyDown函数就判断主节点为客观下线,并**设置变量odown为1,**而这个变量就是用来表示当前哨兵对主节点客观下线的判断结果的。
|
|
|
|
|
|
|
|
|
|
|
|
这部分的判断逻辑如下代码所示,你可以看下:
|
|
|
|
|
|
|
|
|
|
|
|
```plain
|
|
|
|
|
|
void sentinelCheckObjectivelyDown(sentinelRedisInstance *master) {
|
|
|
|
|
|
…
|
|
|
|
|
|
//当前主节点已经被当前哨兵判断为主观下线
|
|
|
|
|
|
if (master->flags & SRI_S_DOWN) {
|
|
|
|
|
|
quorum = 1; //当前哨兵将quorum值置为1
|
|
|
|
|
|
|
|
|
|
|
|
di = dictGetIterator(master->sentinels);
|
|
|
|
|
|
while((de = dictNext(di)) != NULL) { //遍历监听同一主节点的其他哨兵
|
|
|
|
|
|
sentinelRedisInstance *ri = dictGetVal(de);
|
|
|
|
|
|
if (ri->flags & SRI_MASTER_DOWN) quorum++;
|
|
|
|
|
|
}
|
|
|
|
|
|
dictReleaseIterator(di);
|
|
|
|
|
|
//如果quorum值大于预设的quorum阈值,那么设置odown为1。
|
|
|
|
|
|
if (quorum >= master->quorum) odown = 1;
|
|
|
|
|
|
}
|
|
|
|
|
|
|
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
|
|
另外,这里我也画了一张图,展示了该判断逻辑,你可以再来回顾下。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
那么,一旦sentinelCheckObjectivelyDown函数判断主节点客观下线了,它就会调用sentinelEvent函数发送+odown事件消息,然后在主节点的flags变量中**设置SRI\_O\_DOWN标记**,如下所示:
|
|
|
|
|
|
|
|
|
|
|
|
```plain
|
|
|
|
|
|
//判断主节点为客观下线
|
|
|
|
|
|
if (odown) {
|
|
|
|
|
|
//如果没有设置SRI_O_DOWN标记
|
|
|
|
|
|
if ((master->flags & SRI_O_DOWN) == 0) {
|
|
|
|
|
|
sentinelEvent(LL_WARNING,"+odown",master,"%@ #quorum %d/%d",
|
|
|
|
|
|
quorum, master->quorum); //发送+odown事件消息
|
|
|
|
|
|
master->flags |= SRI_O_DOWN; //在主节点的flags中记录SRI_O_DOWN标记
|
|
|
|
|
|
master->o_down_since_time = mstime(); //记录判断客观下线的时间
|
|
|
|
|
|
}
|
|
|
|
|
|
}
|
|
|
|
|
|
|
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
|
|
也就是说,**sentinelCheckObjectivelyDown函数是通过遍历监听同一主节点的其他哨兵的flags变量,来判断主节点是否客观下线的。**
|
|
|
|
|
|
|
|
|
|
|
|
不过,你看完刚才的代码可能会有一个疑问,在上节课学习的sentinelCheckSubjectivelyDown函数中,如果哨兵判断主节点为主观下线,是会在主节点的flags变量中**设置SRI\_S\_DOWN标记**,如下所示:
|
|
|
|
|
|
|
|
|
|
|
|
```plain
|
|
|
|
|
|
//哨兵已判断主节点为主观下线
|
|
|
|
|
|
…
|
|
|
|
|
|
//对应主节点的sentinelRedisInstance结构中flags没有记录主观下线
|
|
|
|
|
|
if ((ri->flags & SRI_S_DOWN) == 0) {
|
|
|
|
|
|
…
|
|
|
|
|
|
ri->flags |= SRI_S_DOWN; //在主节点的flags中记录主观下线的标记,
|
|
|
|
|
|
}
|
|
|
|
|
|
|
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
|
|
但是,sentinelCheckObjectivelyDown函数,是检查监听同一主节点的其他哨兵flags变量中的SRI\_MASTER\_DOWN标记,**那么其他哨兵的SRI\_MASTER\_DOWN标记是如何设置的呢?**
|
|
|
|
|
|
|
|
|
|
|
|
这就和sentinelAskMasterStateToOtherSentinels函数(在sentinel.c文件中)有关系了,下面,我们来具体了解下这个函数。
|
|
|
|
|
|
|
|
|
|
|
|
### sentinelAskMasterStateToOtherSentinels函数
|
|
|
|
|
|
|
|
|
|
|
|
sentinelAskMasterStateToOtherSentinels函数的主要目的,是向监听同一主节点的其他哨兵发送is-master-down-by-addr命令,进而询问其他哨兵对主节点的状态判断。
|
|
|
|
|
|
|
|
|
|
|
|
它会调用redisAsyncCommand函数(在[async.c](https://github.com/redis/redis/tree/5.0/deps/hiredis/async.c)文件中),依次向其他哨兵发送sentinel is-master-down-by-addr命令,同时,它设置了**收到该命令返回结果的处理函数为sentinelReceiveIsMasterDownReply**(在sentinel.c文件中),如下所示:
|
|
|
|
|
|
|
|
|
|
|
|
```plain
|
|
|
|
|
|
void sentinelAskMasterStateToOtherSentinels(sentinelRedisInstance *master, int flags) {
|
|
|
|
|
|
…
|
|
|
|
|
|
di = dictGetIterator(master->sentinels);
|
|
|
|
|
|
//遍历监听同一主节点的其他哨兵
|
|
|
|
|
|
while((de = dictNext(di)) != NULL) {
|
|
|
|
|
|
sentinelRedisInstance *ri = dictGetVal(de);
|
|
|
|
|
|
…
|
|
|
|
|
|
//发送sentinel is-master-down-by-addr命令
|
|
|
|
|
|
retval = redisAsyncCommand(ri->link->cc,
|
|
|
|
|
|
sentinelReceiveIsMasterDownReply, ri,
|
|
|
|
|
|
"%s is-master-down-by-addr %s %s %llu %s",
|
|
|
|
|
|
sentinelInstanceMapCommand(ri,"SENTINEL"),
|
|
|
|
|
|
master->addr->ip, port,
|
|
|
|
|
|
sentinel.current_epoch,
|
|
|
|
|
|
(master->failover_state > SENTINEL_FAILOVER_STATE_NONE) ?
|
|
|
|
|
|
sentinel.myid : "*");
|
|
|
|
|
|
}
|
|
|
|
|
|
…
|
|
|
|
|
|
}
|
|
|
|
|
|
|
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
|
|
另外从代码中,我们可以看到,sentinel is-master-down-by-addr命令中还包括主节点IP、主节点端口号、当前纪元(sentinel.current\_epoch)和实例ID。下面展示的就是这个命令的格式:
|
|
|
|
|
|
|
|
|
|
|
|
```plain
|
|
|
|
|
|
sentinel is-master-down-by-addr 主节点IP 主节点端口 当前epoch 实例ID
|
|
|
|
|
|
|
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
|
|
在这其中,哨兵会根据当前主节点所处的状态来设置实例ID。如果主节点已经要开始进行故障切换了,那么,实例ID会被设置为当前哨兵自身的ID,否则就会被设置为\*号。
|
|
|
|
|
|
|
|
|
|
|
|
这里你需要注意的是,主节点的数据结构是使用了**master->failover\_state**来记录故障切换的状态,其初始值为SENTINEL\_FAILOVER\_STATE\_NONE(对应的数值为0),当主节点开始故障切换时,这个状态值就会大于SENTINEL\_FAILOVER\_STATE\_NONE了。
|
|
|
|
|
|
|
|
|
|
|
|
好了,在了解了sentinelAskMasterStateToOtherSentinels函数的基本执行过程之后,我们还需要知道:sentinelAskMasterStateToOtherSentinels函数向其他哨兵发出了sentinel is-master-down-by-addr命令后,其他哨兵是如何处理的呢?
|
|
|
|
|
|
|
|
|
|
|
|
### sentinel is-master-down-by-addr命令的处理
|
|
|
|
|
|
|
|
|
|
|
|
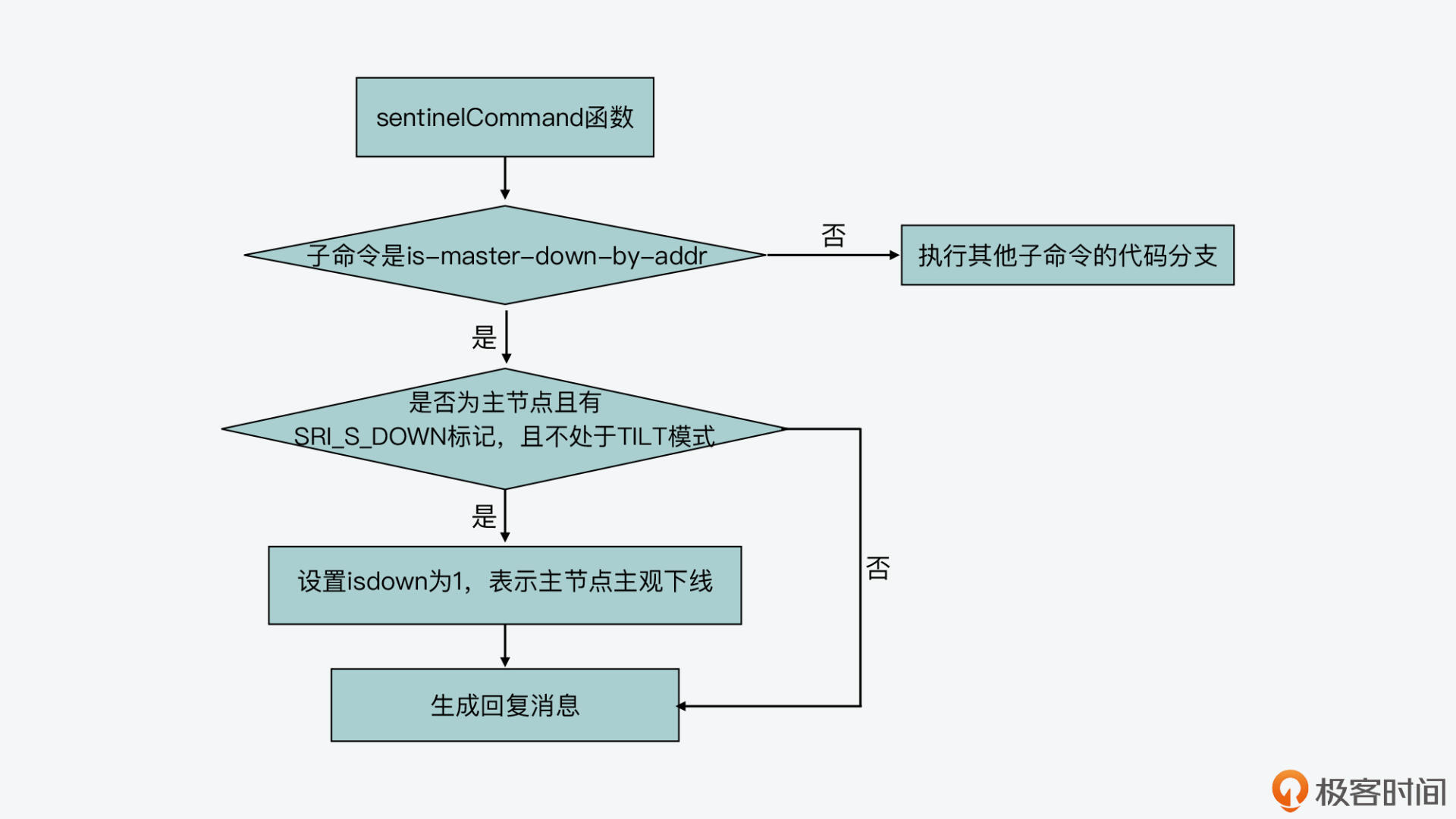
其实,哨兵对于sentinel开头的命令,都是在**sentinelCommand函数**(在sentinel.c文件)中进行处理的。sentinelCommand函数会根据sentinel命令后面跟的不同子命令,来执行不同的分支,而is-master-down-by-addr就是一条子命令。
|
|
|
|
|
|
|
|
|
|
|
|
在is-master-down-by-addr子命令对应的代码分支中,sentinelCommand函数会根据命令中的主节点IP和端口号,来获取主节点对应的sentinelRedisInstance结构体。
|
|
|
|
|
|
|
|
|
|
|
|
紧接着,它会判断主节点的flags变量中是否有SRI\_S\_DOWN和SRI\_MASTER标记,也就是说,sentinelCommand函数会检查当前节点是否的确是主节点,以及哨兵是否已经将该节点标记为主观下线了。如果条件符合,那么它会设置**isdown变量**为1,而这个变量表示的就是哨兵对主节点主观下线的判断结果。
|
|
|
|
|
|
|
|
|
|
|
|
然后,sentinelCommand函数会把当前哨兵对主节点主观下线的判断结果,返回给发送sentinel命令的哨兵。它返回的结果主要包含三部分内容,分别是**当前哨兵对主节点主观下线的判断结果**、**哨兵Leader的ID**,以及**哨兵Leader所属的纪元**。
|
|
|
|
|
|
|
|
|
|
|
|
sentinelCommand函数,对sentinel命令处理的基本过程如下所示:
|
|
|
|
|
|
|
|
|
|
|
|
```plain
|
|
|
|
|
|
void sentinelCommand(client *c) {
|
|
|
|
|
|
…
|
|
|
|
|
|
// is-master-down-by-addr子命令对应的分支
|
|
|
|
|
|
else if (!strcasecmp(c->argv[1]->ptr,"is-master-down-by-addr")) {
|
|
|
|
|
|
…
|
|
|
|
|
|
//当前哨兵判断主节点为主观下线
|
|
|
|
|
|
if (!sentinel.tilt && ri && (ri->flags & SRI_S_DOWN) && (ri->flags & SRI_MASTER))
|
|
|
|
|
|
isdown = 1;
|
|
|
|
|
|
…
|
|
|
|
|
|
addReplyMultiBulkLen(c,3); //哨兵返回的sentinel命令处理结果中包含三部分内容
|
|
|
|
|
|
addReply(c, isdown ? shared.cone : shared.czero); //如果哨兵判断主节点为主观下线,第一部分为1,否则为0
|
|
|
|
|
|
addReplyBulkCString(c, leader ? leader : "*"); //第二部分是Leader ID或者是*
|
|
|
|
|
|
addReplyLongLong(c, (long long)leader_epoch); //第三部分是Leader的纪元
|
|
|
|
|
|
…}
|
|
|
|
|
|
…}
|
|
|
|
|
|
|
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
|
|
你也可以参考下图:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
好了,到这里你就已经知道,哨兵会通过sentinelAskMasterStateToOtherSentinels函数,向监听同一节点的其他哨兵发送sentinel is-master-down-by-addr命令,来获取其他哨兵对主节点主观下线的判断结果。而其他哨兵是使用sentinelCommand函数,来处理sentinel is-master-down-by-addr命令,并在命令处理的返回结果中,包含自己对主节点主观下线的判断结果。
|
|
|
|
|
|
|
|
|
|
|
|
不过从刚才的代码中,你也可以看到,在其他哨兵返回的sentinel命令处理结果中,会包含哨兵Leader的信息。其实,这是因为sentinelAskMasterStateToOtherSentinels函数发送的sentinel is-master-down-by-addr命令本身,也可以用来**触发哨兵Leader选举**。这个我稍后会给你介绍。
|
|
|
|
|
|
|
|
|
|
|
|
那么,我们再回到前面讲主节点客观下线判断时提出的问题,sentinelCheckObjectivelyDown函数要检查监听同一主节点的其他哨兵flags变量中的SRI\_MASTER\_DOWN标记,但是,其他哨兵的SRI\_MASTER\_DOWN标记是如何设置的呢?
|
|
|
|
|
|
|
|
|
|
|
|
这实际上是和哨兵在sentinelAskMasterStateToOtherSentinels函数中,向其他哨兵发送sentinel is-master-down-by-addr命令时,设置的**命令结果处理函数sentinelReceiveIsMasterDownReply**有关。
|
|
|
|
|
|
|
|
|
|
|
|
### sentinelReceiveIsMasterDownReply函数
|
|
|
|
|
|
|
|
|
|
|
|
在sentinelReceiveIsMasterDownReply函数中,它会判断其他哨兵返回的回复结果。回复结果会包含我刚才介绍的三部分内容,分别是当前哨兵对主节点主观下线的判断结果、哨兵Leader的ID,以及哨兵Leader所属的纪元。这个函数会进一步检查,其中第一部分内容“当前哨兵对主节点主观下线的判断结果”是否为1。
|
|
|
|
|
|
|
|
|
|
|
|
如果是的话,这就表明对应的哨兵已经判断主节点为主观下线了,那么当前哨兵就会把自己记录的对应哨兵的flags,设置为SRI\_MASTER\_DOWN。
|
|
|
|
|
|
|
|
|
|
|
|
下面的代码就展示了sentinelReceiveIsMasterDownReply函数判断其他哨兵回复结果的执行逻辑,你可以看下。
|
|
|
|
|
|
|
|
|
|
|
|
```plain
|
|
|
|
|
|
//r是当前哨兵收到的其他哨兵的命令处理结果
|
|
|
|
|
|
//如果返回结果包含三部分内容,并且第一,二,三部分内容的类型分别是整数、字符串和整数
|
|
|
|
|
|
if (r->type == REDIS_REPLY_ARRAY && r->elements == 3 &&
|
|
|
|
|
|
r->element[0]->type == REDIS_REPLY_INTEGER &&
|
|
|
|
|
|
r->element[1]->type == REDIS_REPLY_STRING &&
|
|
|
|
|
|
r->element[2]->type == REDIS_REPLY_INTEGER)
|
|
|
|
|
|
{
|
|
|
|
|
|
ri->last_master_down_reply_time = mstime();
|
|
|
|
|
|
//如果返回结果第一部分的值为1,则在对应哨兵的flags中设置SRI_MASTER_DOWN标记
|
|
|
|
|
|
if (r->element[0]->integer == 1) {
|
|
|
|
|
|
ri->flags |= SRI_MASTER_DOWN;
|
|
|
|
|
|
}
|
|
|
|
|
|
|
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
|
|
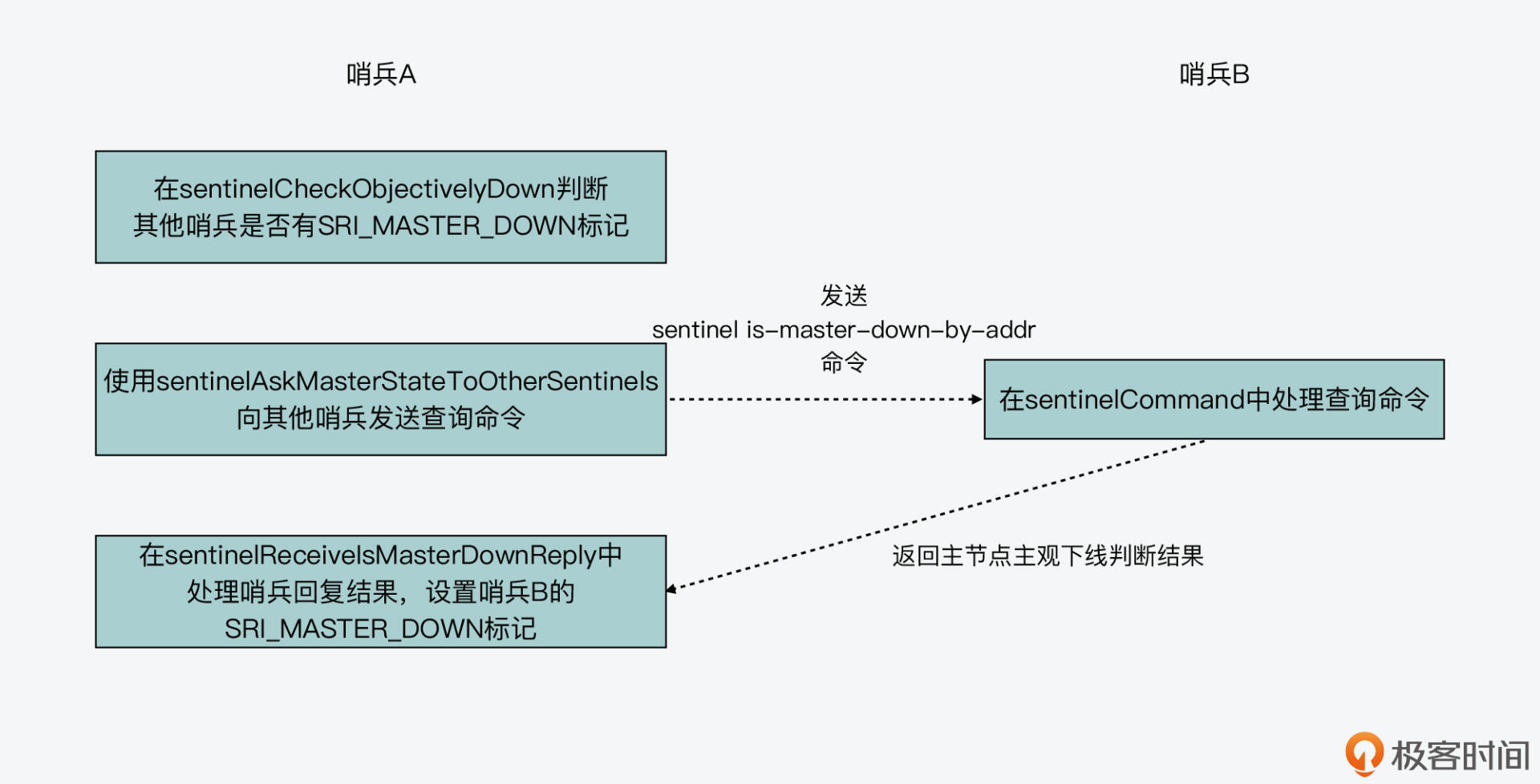
所以到这里,你就可以知道,一个哨兵调用sentinelCheckObjectivelyDown函数,是直接检查其他哨兵的flags是否有SRI\_MASTER\_DOWN标记,而哨兵又是通过sentinelAskMasterStateToOtherSentinels函数,向其他哨兵发送sentinel is-master-down-by-addr命令,从而询问其他哨兵对主节点主观下线的判断结果的,并且会根据命令回复结果,在结果处理函数sentinelReceiveIsMasterDownReply中,设置其他哨兵的flags为SRI\_MASTER\_DOWN。下图也展示了这个执行逻辑,你可以再来整体回顾下。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
那么,掌握了这个执行逻辑后,我们再来看下,哨兵选举是什么时候开始执行的。
|
|
|
|
|
|
|
|
|
|
|
|
## 哨兵选举
|
|
|
|
|
|
|
|
|
|
|
|
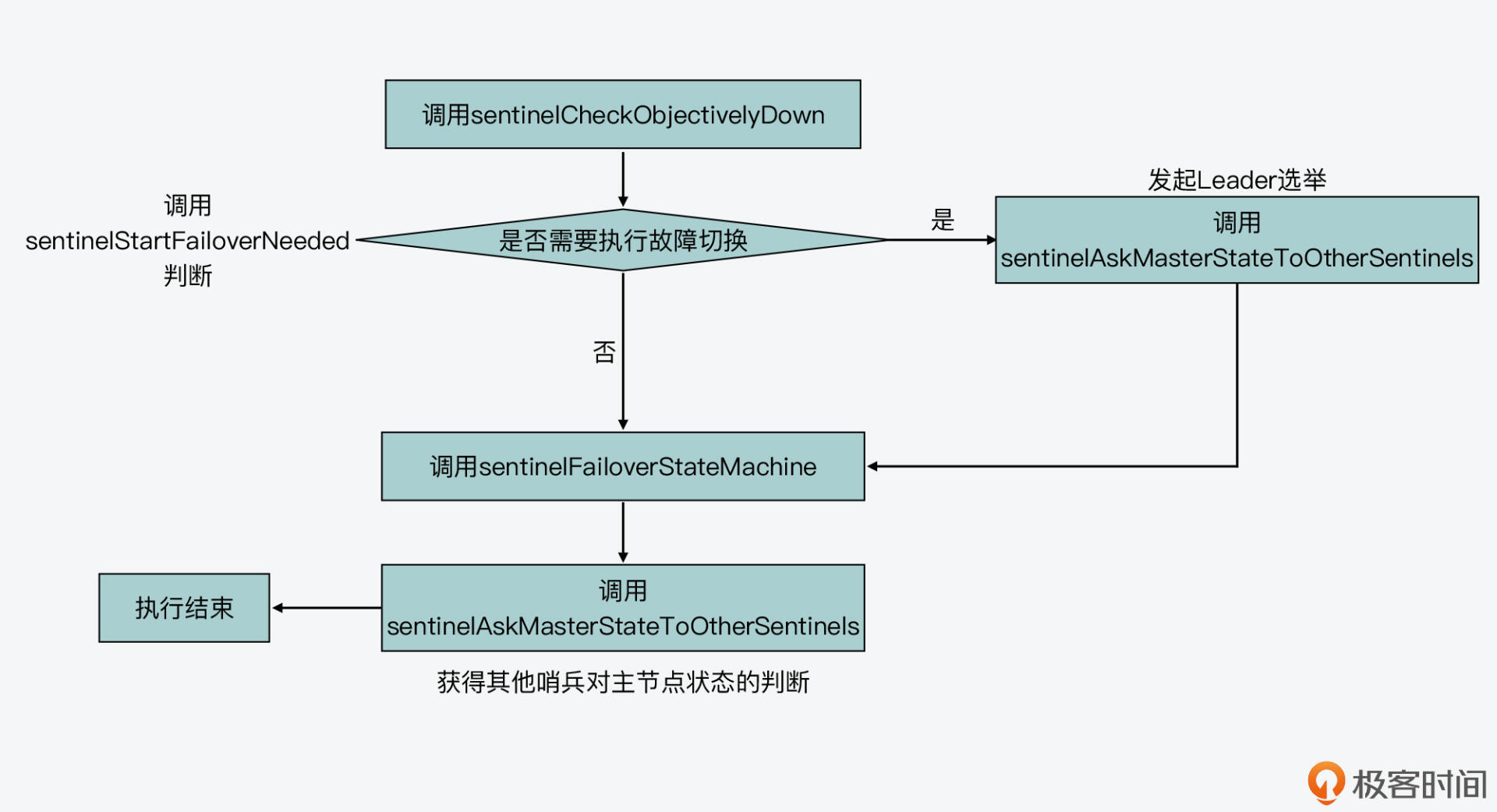
这里,为了了解哨兵选举的触发,我们先来复习下在上节课,我讲过的sentinelHandleRedisInstance函数中针对主节点的调用关系,如下图所示:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
从图中可以看到,sentinelHandleRedisInstance会先调用sentinelCheckObjectivelyDown函数,再调用sentinelStartFailoverIfNeeded函数,判断是否要开始故障切换,如果sentinelStartFailoverIfNeeded函数的返回值为**非0值**,那么sentinelAskMasterStateToOtherSentinels函数会被调用。否则的话,sentinelHandleRedisInstance就直接调用sentinelFailoverStateMachine函数,并再次调用sentinelAskMasterStateToOtherSentinels函数。
|
|
|
|
|
|
|
|
|
|
|
|
那么,在这个调用关系中,sentinelStartFailoverIfNeeded会判断是否要进行故障切换,它的**判断条件**有三个,分别是:
|
|
|
|
|
|
|
|
|
|
|
|
* 主节点的flags已经标记了SRI\_O\_DOWN;
|
|
|
|
|
|
* 当前没有在执行故障切换;
|
|
|
|
|
|
* 如果已经开始故障切换,那么开始时间距离当前时间,需要超过sentinel.conf文件中的sentinel failover-timeout配置项的2倍。
|
|
|
|
|
|
|
|
|
|
|
|
这三个条件都满足后,sentinelStartFailoverIfNeeded就会调用**sentinelStartFailover函数**,开始启动故障切换,而sentinelStartFailover会将主节点的failover\_state设置为SENTINEL\_FAILOVER\_STATE\_WAIT\_START,同时在主节点的flags设置SRI\_FAILOVER\_IN\_PROGRESS标记,表示已经开始故障切换,如下所示:
|
|
|
|
|
|
|
|
|
|
|
|
```plain
|
|
|
|
|
|
void sentinelStartFailover(sentinelRedisInstance *master) {
|
|
|
|
|
|
…
|
|
|
|
|
|
master->failover_state = SENTINEL_FAILOVER_STATE_WAIT_START;
|
|
|
|
|
|
master->flags |= SRI_FAILOVER_IN_PROGRESS;
|
|
|
|
|
|
…
|
|
|
|
|
|
}
|
|
|
|
|
|
|
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
|
|
而一旦sentinelStartFailover函数将主节点的failover\_state设置为SENTINEL\_FAILOVER\_STATE\_WAIT\_START后,接下来,sentinelFailoverStateMachine函数就会执行状态机来完成实际的切换。不过,**在实际切换前,sentinelAskMasterStateToOtherSentinels函数会被调用。**
|
|
|
|
|
|
|
|
|
|
|
|
看到这个调用关系,你可能会有个疑问:sentinelAskMasterStateToOtherSentinels函数是用来向其他哨兵询问对主节点主观下线的判断结果的,如果sentinelStartFailoverIfNeeded判断要开始执行故障切换,那么为什么还要调用sentinelAskMasterStateToOtherSentinels函数呢?
|
|
|
|
|
|
|
|
|
|
|
|
其实,这就和sentinelAskMasterStateToOtherSentinels函数的另一个作用有关了,这个函数除了会用来向其他哨兵询问对主节点状态的判断,它还可以用来**向其他哨兵发起Leader选举**。
|
|
|
|
|
|
|
|
|
|
|
|
在刚才给你介绍这个函数时,我提到它会给其他哨兵发送sentinel is-master-down-by-addr命令,这个命令包括主节点IP、主节点端口号、当前纪元(sentinel.current\_epoch)和实例ID。其中,如果主节点的failover\_state已经不再是SENTINEL\_FAILOVER\_STATE\_NONE,那么实例ID会被设置为当前哨兵的ID。
|
|
|
|
|
|
|
|
|
|
|
|
而在sentinel命令处理函数中,如果检测到sentinel命令中的实例ID不为\*号,那么就会调用**sentinelVoteLeader函数**来进行Leader选举。
|
|
|
|
|
|
|
|
|
|
|
|
```plain
|
|
|
|
|
|
//当前实例为主节点,并且sentinel命令的实例ID不等于*号
|
|
|
|
|
|
if (ri && ri->flags & SRI_MASTER && strcasecmp(c->argv[5]->ptr,"*")) {
|
|
|
|
|
|
//调用sentinelVoteLeader进行哨兵Leader选举
|
|
|
|
|
|
leader = sentinelVoteLeader(ri,(uint64_t)req_epoch, c->argv[5]->ptr,
|
|
|
|
|
|
&leader_epoch);
|
|
|
|
|
|
}
|
|
|
|
|
|
|
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
|
|
下面,我们来具体了解下这个sentinelVoteLeader函数。
|
|
|
|
|
|
|
|
|
|
|
|
### sentinelVoteLeader函数
|
|
|
|
|
|
|
|
|
|
|
|
sentinelVoteLeader函数会实际执行投票逻辑,这里我通过一个例子来给你说明。
|
|
|
|
|
|
|
|
|
|
|
|
假设哨兵A判断主节点master客观下线了,它现在向哨兵B发起投票请求,哨兵A的ID是req\_runid。那么哨兵B在执行sentinelVoteLeader函数时,这个函数会判断哨兵A的纪元(req\_epoch)、哨兵B的纪元(sentinel.current\_epoch),以及master记录的Leader的纪元(master->leader\_epoch)。按照Raft协议的定义,哨兵A就是Candidate节点,而哨兵B就是Follower节点。
|
|
|
|
|
|
|
|
|
|
|
|
我在上节课给你介绍Raft协议时有提到过,Candidate发起投票都是有轮次记录的,Follower在一轮投票中只能投一票。这里的纪元正是起到了**轮次记录**的作用。而sentinelVoteLeader函数判断纪元也是按照Raft协议的要求,让Follower在一轮中只能投一票。
|
|
|
|
|
|
|
|
|
|
|
|
那么,**sentinelVoteLeader函数让哨兵B投票的条件是**:master记录的Leader的纪元小于哨兵A的纪元,同时,哨兵A的纪元要大于或等于哨兵B的纪元。这两个条件保证了哨兵B还没有投过票,否则的话,sentinelVoteLeader函数就直接返回当前master中记录的Leader ID了,这也是哨兵B之前投过票后记录下来的。
|
|
|
|
|
|
|
|
|
|
|
|
下面的代码展示了刚才介绍的这部分逻辑,你可以看下。
|
|
|
|
|
|
|
|
|
|
|
|
```plain
|
|
|
|
|
|
if (req_epoch > sentinel.current_epoch) {
|
|
|
|
|
|
sentinel.current_epoch = req_epoch;
|
|
|
|
|
|
…
|
|
|
|
|
|
sentinelEvent(LL_WARNING,"+new-epoch",master,"%llu",
|
|
|
|
|
|
(unsigned long long) sentinel.current_epoch);
|
|
|
|
|
|
}
|
|
|
|
|
|
|
|
|
|
|
|
if (master->leader_epoch < req_epoch && sentinel.current_epoch <= req_epoch)
|
|
|
|
|
|
{
|
|
|
|
|
|
sdsfree(master->leader);
|
|
|
|
|
|
master->leader = sdsnew(req_runid);
|
|
|
|
|
|
master->leader_epoch = sentinel.current_epoch;
|
|
|
|
|
|
…
|
|
|
|
|
|
}
|
|
|
|
|
|
return master->leader ? sdsnew(master->leader) : NULL;
|
|
|
|
|
|
|
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
|
|
那么现在,你就了解了sentinelVoteLeader函数是如何使用纪元判断来按照Raft协议完成哨兵Leader选举的了。
|
|
|
|
|
|
|
|
|
|
|
|
接下来,发起投票的哨兵仍然是通过sentinelReceiveIsMasterDownReply函数来处理其他哨兵对Leader投票的返回结果。这个返回结果,就像刚才给你介绍的,它的第二、三部分内容是哨兵Leader的ID,和哨兵Leader所属的纪元。发起投票的哨兵就可以从这个结果中获得其他哨兵对Leader的投票结果了。
|
|
|
|
|
|
|
|
|
|
|
|
最后,发起投票的哨兵在调用了sentinelAskMasterStateToOtherSentinels函数让其他哨兵投票后,会执行sentinelFailoverStateMachine函数。
|
|
|
|
|
|
|
|
|
|
|
|
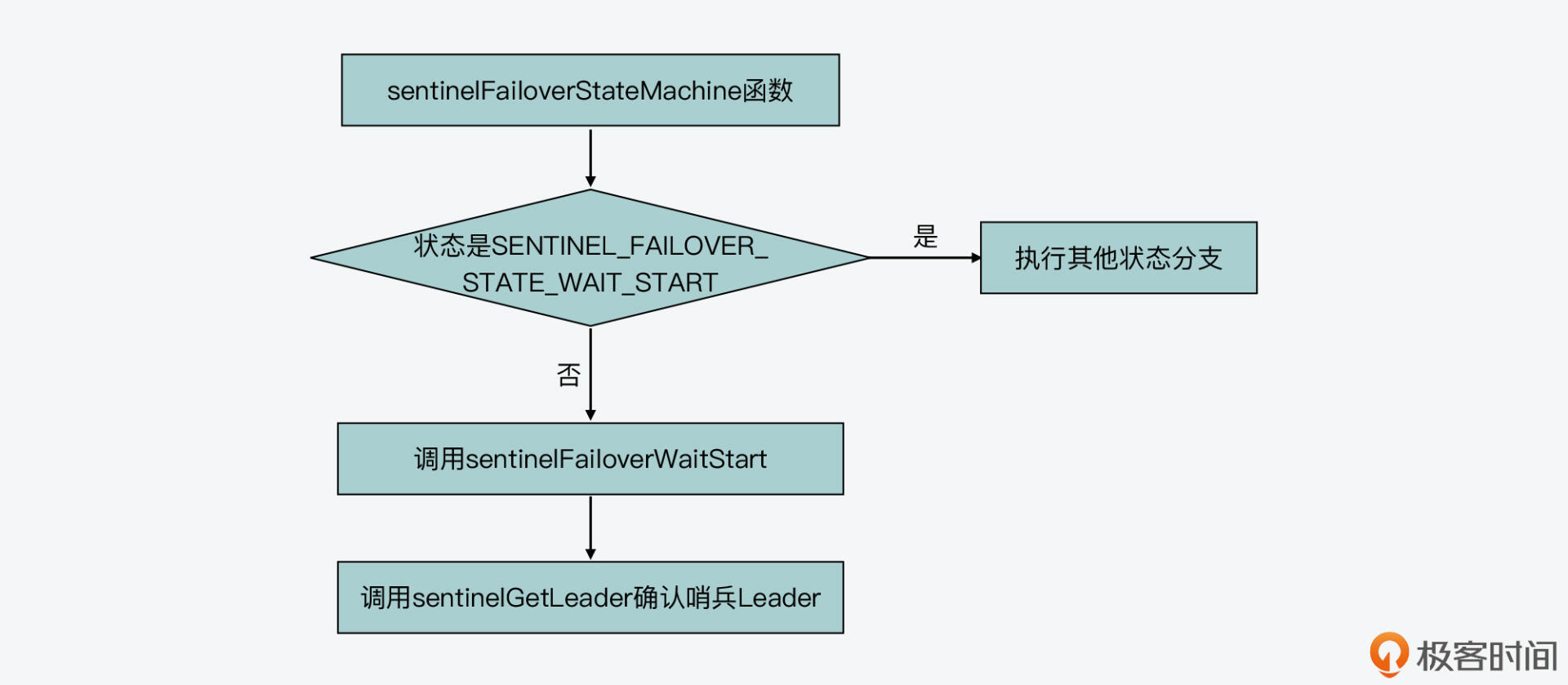
如果主节点开始执行故障切换了,那么,主节点的failover\_state,会被设置成SENTINEL\_FAILOVER\_STATE\_WAIT\_START。在这种状态下,sentinelFailoverStateMachine函数会调用sentinelFailoverWaitStart函数。而sentinelFailoverWaitStart函数,又会调用sentinelGetLeader函数,来判断发起投票的哨兵是否为哨兵Leader。发起投票的哨兵要想成为Leader,必须满足两个条件:
|
|
|
|
|
|
|
|
|
|
|
|
* 一是,获得超过半数的其他哨兵的赞成票
|
|
|
|
|
|
* 二是,获得超过预设的quorum阈值的赞成票数。
|
|
|
|
|
|
|
|
|
|
|
|
这两个条件,也可以从sentinelGetLeader函数中的代码片段看到,如下所示。
|
|
|
|
|
|
|
|
|
|
|
|
```plain
|
|
|
|
|
|
//voters是所有哨兵的个数,max_votes是获得的票数
|
|
|
|
|
|
voters_quorum = voters/2+1; //赞成票的数量必须是超过半数以上的哨兵个数
|
|
|
|
|
|
//如果赞成票数不到半数的哨兵个数或者少于quorum阈值,那么Leader就为NULL
|
|
|
|
|
|
if (winner && (max_votes < voters_quorum || max_votes < master->quorum))
|
|
|
|
|
|
winner = NULL;
|
|
|
|
|
|
//确定最终的Leader
|
|
|
|
|
|
winner = winner ? sdsnew(winner) : NULL;
|
|
|
|
|
|
|
|
|
|
|
|
```
|
|
|
|
|
|
|
|
|
|
|
|
下图就展示了刚才介绍的确认哨兵Leader时的调用关系,你可以看下。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
好了,到这里,最终的哨兵Leader就能被确定了。
|
|
|
|
|
|
|
|
|
|
|
|
## 小结
|
|
|
|
|
|
|
|
|
|
|
|
好了,今天这节课的内容就到这里,我们来小结下。
|
|
|
|
|
|
|
|
|
|
|
|
今天这节课,我在上节课的基础上,重点给你介绍了哨兵工作过程中的客观下线判断,以及Leader选举。因为这个过程涉及哨兵之间的交互询问,所以并不容易掌握,你需要好好关注以下我提到的重点内容。
|
|
|
|
|
|
|
|
|
|
|
|
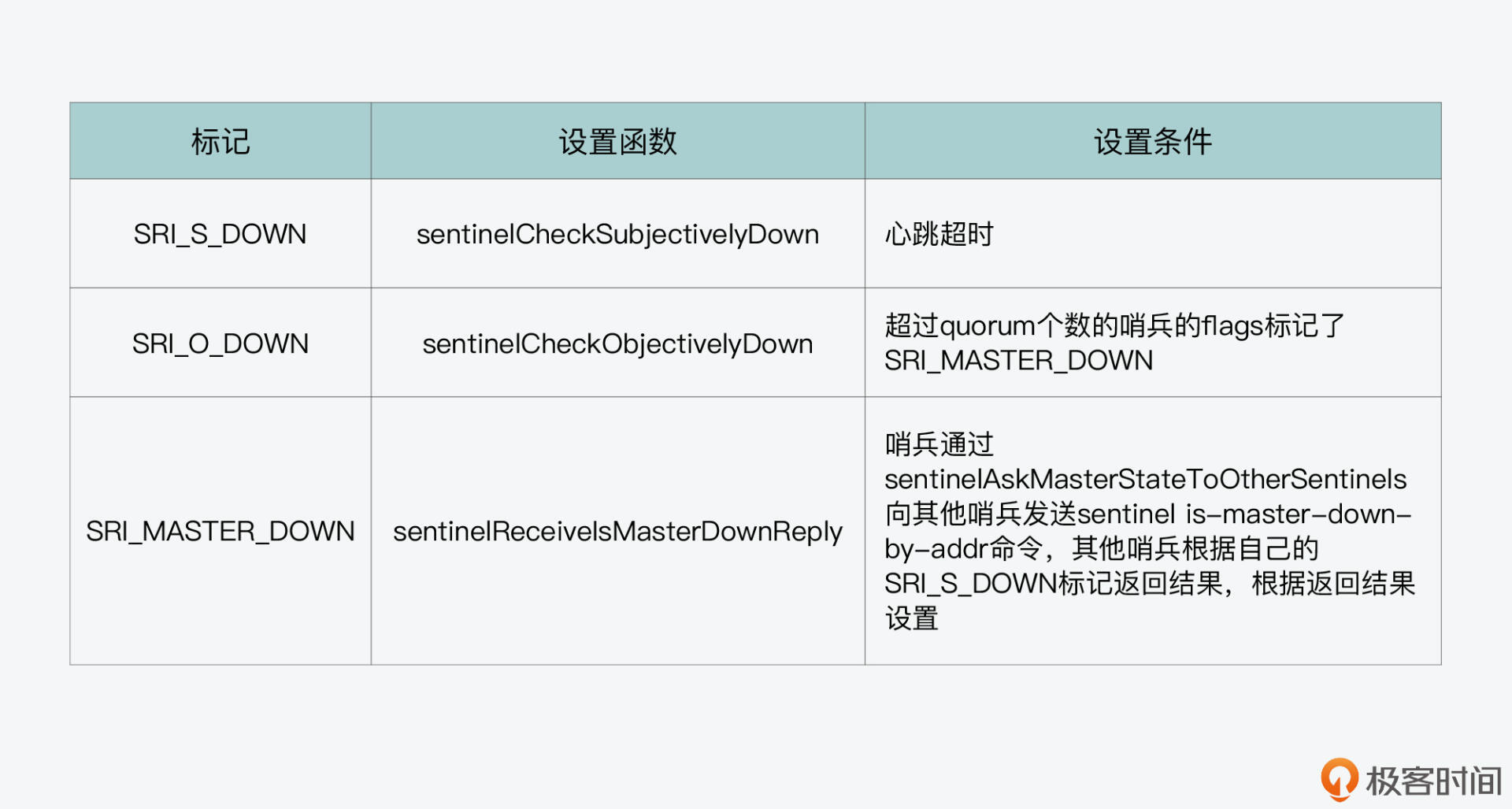
首先,客观下线的判断涉及三个标记的判断,分别是主节点flags中的SRI\_S\_DOWN和SRI\_O\_DOWN,以及哨兵实例flags中的SRI\_MASTER\_DOWN,我画了下面这张表,展示了这三个标记的设置函数和条件,你可以再整体回顾下。
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
而一旦哨兵判断主节点客观下线了,那么哨兵就会**调用sentinelAskMasterStateToOtherSentinels函数进行哨兵Leader选举**。这里,你需要注意的是,向其他哨兵询问主节点主观下线状态,以及向其他哨兵发起Leader投票,都是通过sentinel is-master-down-by-addr命令实现的,而Redis源码是用了同一个函数sentinelAskMasterStateToOtherSentinels来发送该命令,所以你在阅读源码时,**要注意区分sentinelAskMasterStateToOtherSentinels发送的命令是查询主节点主观下线状态还是进行投票**。
|
|
|
|
|
|
|
|
|
|
|
|
最后,哨兵Leader选举的投票是在sentinelVoteLeader函数中完成的,为了符合Raft协议的规定,sentinelVoteLeader函数在执行时主要是要比较哨兵的纪元,以及master记录的Leader纪元,这样才能满足Raft协议对Follower在一轮投票中只能投一票的要求。
|
|
|
|
|
|
|
|
|
|
|
|
好了,到今天这节课,我们就了解了哨兵Leader选举的过程,你可以看到,虽然哨兵选举的最后执行逻辑就是在一个函数中,但是哨兵选举的触发逻辑是包含在了哨兵的整个工作过程中的,所以我们也需要掌握这个过程中的其他操作,比如主观下线判断、客观下线判断等。
|
|
|
|
|
|
|
|
|
|
|
|
## 每课一问
|
|
|
|
|
|
|
|
|
|
|
|
哨兵在sentinelTimer函数中调用sentinelHandleDictOfRedisInstances函数,对每个主节点都执行sentinelHandleRedisInstance函数,并且还会对主节点的所有从节点也执行sentinelHandleRedisInstance函数,那么,哨兵会判断从节点的主观下线和客观下线吗?
|
|
|
|
|
|
|