95 lines
12 KiB
Markdown
95 lines
12 KiB
Markdown
|
|
# 21|复制(三):最早的数据复制方式竟然是无主复制?
|
|||
|
|
|
|||
|
|
你好,我是陈现麟。
|
|||
|
|
|
|||
|
|
通过上节课,我们掌握了在部署多数据中心的时候,可以用多主复制的方式,让用户直接读写离自己最近的数据中心的数据,减少用户与数据中心之间的网络延迟,提升用户体验。
|
|||
|
|
|
|||
|
|
当我们的业务面向全球的用户时,这个优点将会变得尤为重要,比如一个北京的用户,访问北京的数据中心,网络时延为毫秒级别,但是当他访问美国的数据中心时,网络时延就是百毫秒级别了,这是影响用户体验的关键点。所以,当极客时间启动全球业务的时候,多主复制是一个可以考虑的方案。
|
|||
|
|
|
|||
|
|
但不论是主从复制还是多主复制,所有的写入操作都必须依赖主节点,如果主节点出现故障,则必须再选举出一个新的主节点后,才能继续提供写服务,否则就将大大影响系统的可用性。那么是否有办法可以让单节点故障时,系统的可用性完全不受到影响呢?
|
|||
|
|
|
|||
|
|
我们可以这样思考一下,既然系统的可用性是由主节点的故障导致的,那么我们是否能去掉主节点和从节点的角色,也就是让系统中所有节点的角色都是对等的,这样是否可以解决问题呢?
|
|||
|
|
|
|||
|
|
其实这就是无主复制的数据复制方式,它确实可以解决由主节点故障,导致的系统可用性问题。虽然无主复制是“复制”系列课程的最后一节,但其实它才是最早出现的数据复制方式。**无主复制又称为去中心复制,只不过在关系数据库出现并且主导后,由于要确保各副本写入顺序的一致性,主从复制开始流行起来,无主复制被大家慢慢遗忘了**。
|
|||
|
|
|
|||
|
|
本节课中,我们将按无主复制的实现方案,面临的问题,以及如何解决这个思路来学习,最后对主从复制、多主复制和无主复制,这三种数据复制的方式进行比较和总结。
|
|||
|
|
|
|||
|
|
## 如何实现无主复制
|
|||
|
|
|
|||
|
|
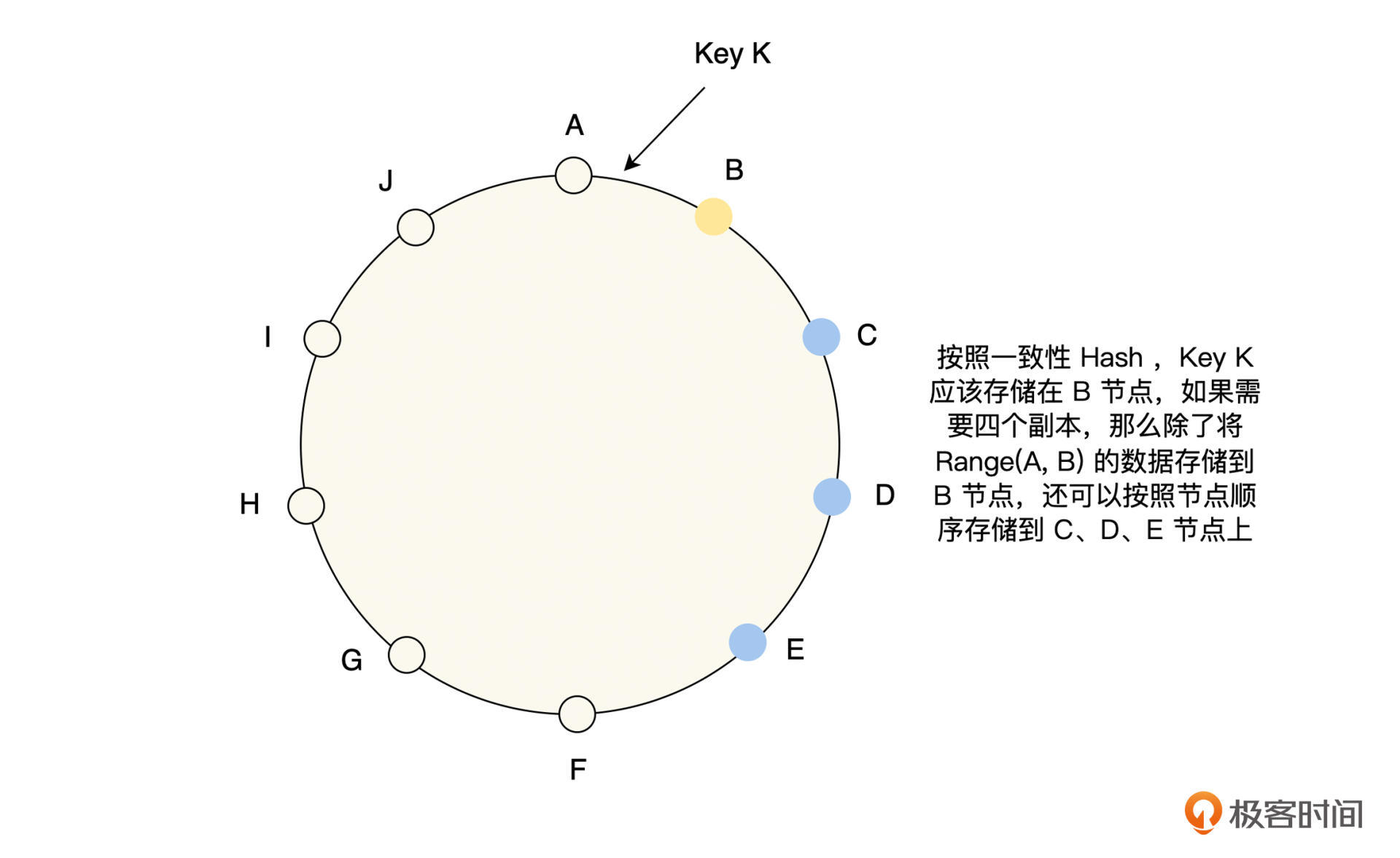
无主复制顾名思义,即集群中没有主节点和从节点之分,所有节点的角色都是对等的,每个节点负责存储和处理一定范围的数据,并且由于高可用的要求,每一份数据都需要在多个节点上存储,那么一种常见的处理方式就如下图所示。
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
从图中可以看到,每一份数据按顺序存储多个副本,每一个节点都会负责多个范围数据的存储,节点 B 存储 Key Range (H,B) 的数据,节点 C 存储 Key Range (I,C) 的数据,节点 E 存储 Key Range (A,E) 的数据。
|
|||
|
|
|
|||
|
|
这里要特别注意,主从复制和无主复制有一个非常大的区别,主从复制先写主节点,然后由主节点将数据变更同步到所有的从副本,从副本数据的变更顺序由主节点的写入顺序决定;但是,无主复制是由客户端或代理程序,直接负责将数据写入多个存储节点,这些存储节点之间是不会直接进行数据同步的。
|
|||
|
|
|
|||
|
|
### 数据读写
|
|||
|
|
|
|||
|
|
从刚才的讨论中可以看出,无主复制写入数据时,为了数据的高可用,会向多个节点写入多份数据,那么它是等所有的节点都写入成功,客户端才返回成功呢?还是有一个节点写入成功,客户端就返回成功呢?
|
|||
|
|
|
|||
|
|
同样地,读取数据也存在这个问题,每一份数据都有多个副本,那么它是等所有的节点都读取成功,客户端才返回成功呢?还是有一个节点读取成功,客户端就返回成功呢?
|
|||
|
|
|
|||
|
|
这里我们举个例子来讨论一下,假设现在有 3 个副本,如果数据成功写入 1 个副本,那么要确保读请求一定能读取到最新写入的数据,就需要成功读取 3 个副本的数据;如果数据成功写入 2 个副本,则需要成功读取 2 个副本的数据;如果数据成功写入 3 个副本,那么成功读取 1 个副本的数据即可。
|
|||
|
|
|
|||
|
|
这样就可以得出一个结论,如果要确保读取到最新的数据,读取的副本和写入的副本之间的交集不能为空,只要存在交集,就必定有一个写入的最新副本被读取到,那么我们就可以按如下的方式来定义这个问题。
|
|||
|
|
|
|||
|
|
假设对于每一份数据,我们保存 n 个副本,客户端写入成功的副本数为 w ,读取成功的副本数为 r ,那么**只需要满足仲裁条件 w + r > n 成立,读副本和写副本之间的交集就一定不为空,即一定能读取到最新的写入**。
|
|||
|
|
|
|||
|
|
**我们将满足仲裁条件 w + r > n 的 w 和 r 称之为法定票数写和读,这就是Quorum 机制,你也一定能发现它其实就是抽屉原理的应用**。那么对于 w、r 和 n 的值,通常是可以配置的,一个常见的配置选择为,设置 n 为奇数(通常为 3 或 5 ),w = r = (n + 1)/2 向上取整。这个配置的读写比较均衡,比如 n = 5,那么 w = r = 3,读和写都保证 3 个副本成功即可,能容忍 2 个节点故障。
|
|||
|
|
|
|||
|
|
在实际的读多写少的业务场景中,我们假设 n = 5 ,如果想要读性能最高,可以设置 w = n = 5 ,r = 1 ,在读取的时候,只需等待一个节点读取成功即可。但是在写入的时候,需要所有的副本都写入成功,因此它不能容忍节点故障,如果有一个节点不可用,将会导致写入失败。如果 w = 4 ,r = 2 ,那么读性能依然比较高,并且能容忍一个节点不可用,这就是读性能、写性能和可用性之间的权衡。
|
|||
|
|
|
|||
|
|
反之也是同样的思路,对于写多读少的业务场景,我们假设 n = 5 ,如果想要写性能最高,那么可以设置 r = n = 5 ,w = 1 ,在写入的时候,只需等待一个节点读取成功即可。但是在读取的时候,需要所有的副本都读取成功,因此它不能容忍节点故障,如果有一个节点不可用,将会导致读取失败。如果 r = 4 ,w = 2 ,那么读性能依然比较高,并且能容忍一个节点不可用。
|
|||
|
|
|
|||
|
|
现在我们可以看出,Quorum 机制通过参数的调整,能够非常方便地适应业务的特点,在读性能、写性能和可用性之间达到平衡。
|
|||
|
|
|
|||
|
|
### 数据修复
|
|||
|
|
|
|||
|
|
我们知道一个复制模型,应该确保数据最终都能成功复制到所有的副本上,主从复制和多主复制是通过主节点接受数据写入,并且由主节点负责将数据副本,成功复制到所有的从副本来保证的。但是在上文“数据读写”的讨论中,我们了解了当 w < n 时,并不能保证数据成功写入所有的副本中,那么无主复制的这个问题应该如何解决呢?一般来说,有如下的两种方式来实现数据的修复。
|
|||
|
|
|
|||
|
|
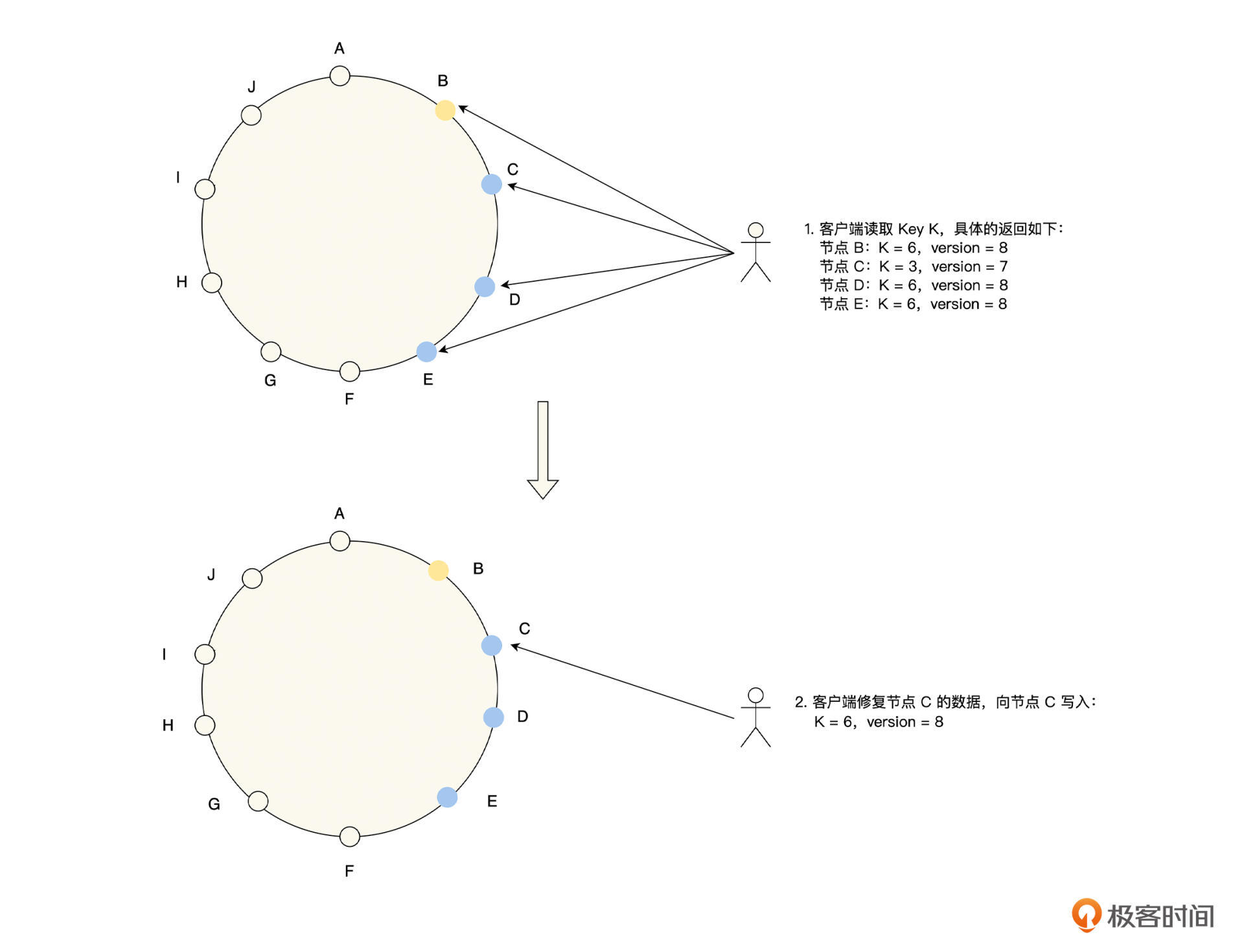
首先,是**读修复**。当客户端并行读取多个副本时,如果检测到某一副本上的数据是过期的,那么在读取数据成功后,就异步将新值写入到所有过期的副本上,进行数据修复,具体如下图所示。
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
其次,是**反熵过程**。由存储系统启动后台进程,不断去查找副本之间数据的差异,将数据从新的副本上复制到旧的副本上。这里要注意,反熵过程在同步数据的时候,不能保证以数据写入的顺序复制到其他的副本,这和主从复制有着非常大的差异,同时由于数据同步是后台异步复制的,会有明显的同步滞后。
|
|||
|
|
|
|||
|
|
总体来看,读修复对于读取频繁的数据,修复会非常及时,但它只有在数据被读取时才会发生,那么如果系统只支持读修复,不支持反熵过程的话,有一些很少访问的数据,在还没有发生读修复时,会因为副本节点的不可用而更新丢失,影响系统的持久性。所以,将读修复和反熵过程结合是一种更全面的策略。
|
|||
|
|
|
|||
|
|
## 一个关键的选择
|
|||
|
|
|
|||
|
|
到这里,我们已经掌握了如何实现一个无主复制的数据系统,不过在这个系统中,还有一个非常关键的选择,如果系统的某些节点发生故障,导致读或写的时候,无法等到系统配置的 w 和 r 个客户端成功返回,我们应该如何处理呢?这里我们可以依据 2 个方案来思考。
|
|||
|
|
|
|||
|
|
* **当读写无法到达Quorum要求的 w 或 r 时,直接返回失败,并且明确地将错误返回给客户端**。
|
|||
|
|
* **在读写的时候,依然是等待 w 和 r 个客户端成功返回,只不过有一些节点不在事先指定的 n 个节点的集合内**。比如本课第一幅图中的 Key K,它指定的存储副本集合应该是 B、C、D 和 E,假设 D 出现故障了,那么它的存储集合可以临时修改为 B、C、E 和 F。
|
|||
|
|
|
|||
|
|
你会发现第一个方案,即当系统的故障已经导致仲裁条件不成立时,就返回失败,并且明确地将错误返回给客户端的选择,是一致性和可用性之间的权衡,是为了数据的一致性而放弃了系统的可用性。
|
|||
|
|
|
|||
|
|
对于第二个方案,在数据读写时,当我们在规定的 n 个节点的集合内,无法达到 w 或 r 时,就按照一定的规则再读写一定的节点。这些法定集合之外的数据读写的节点,可以设置一些简单的规则,比如对于一致性 Hash 环来说,可以将读写顺延到下一个节点,作为临时节点进行读写。当故障恢复时,临时节点需要将这些接收到的数据,全部复制到原来的节点上,即进行数据的回传。
|
|||
|
|
|
|||
|
|
通过这个方式,我们可以确保在数据读写时,系统只需要有任意 w 或 r 个节点可用,就能读写成功,这将大大提升系统的可用性。但是这也说明,即使系统的读写能满足仲裁条件 w + r > n ,我们依然无法保证,一定能读取到最新的值,因为新值写入的节点并不包含在这 n 个节点之中。
|
|||
|
|
|
|||
|
|
那么**这个方案叫 Sloppy Quorum ,相比于传统的 Quorum ,它为了系统的可用性而牺牲了数据的一致性**。目前,几乎所有无主复制的存储系统都支持 Sloppy Quorum,但是它在 Cassandra 中是默认关闭的,而在 Riak 中则是默认启用的,所以我们在使用时,可以根据业务情况进行选择。
|
|||
|
|
|
|||
|
|
## 三种数据复制模式总结
|
|||
|
|
|
|||
|
|
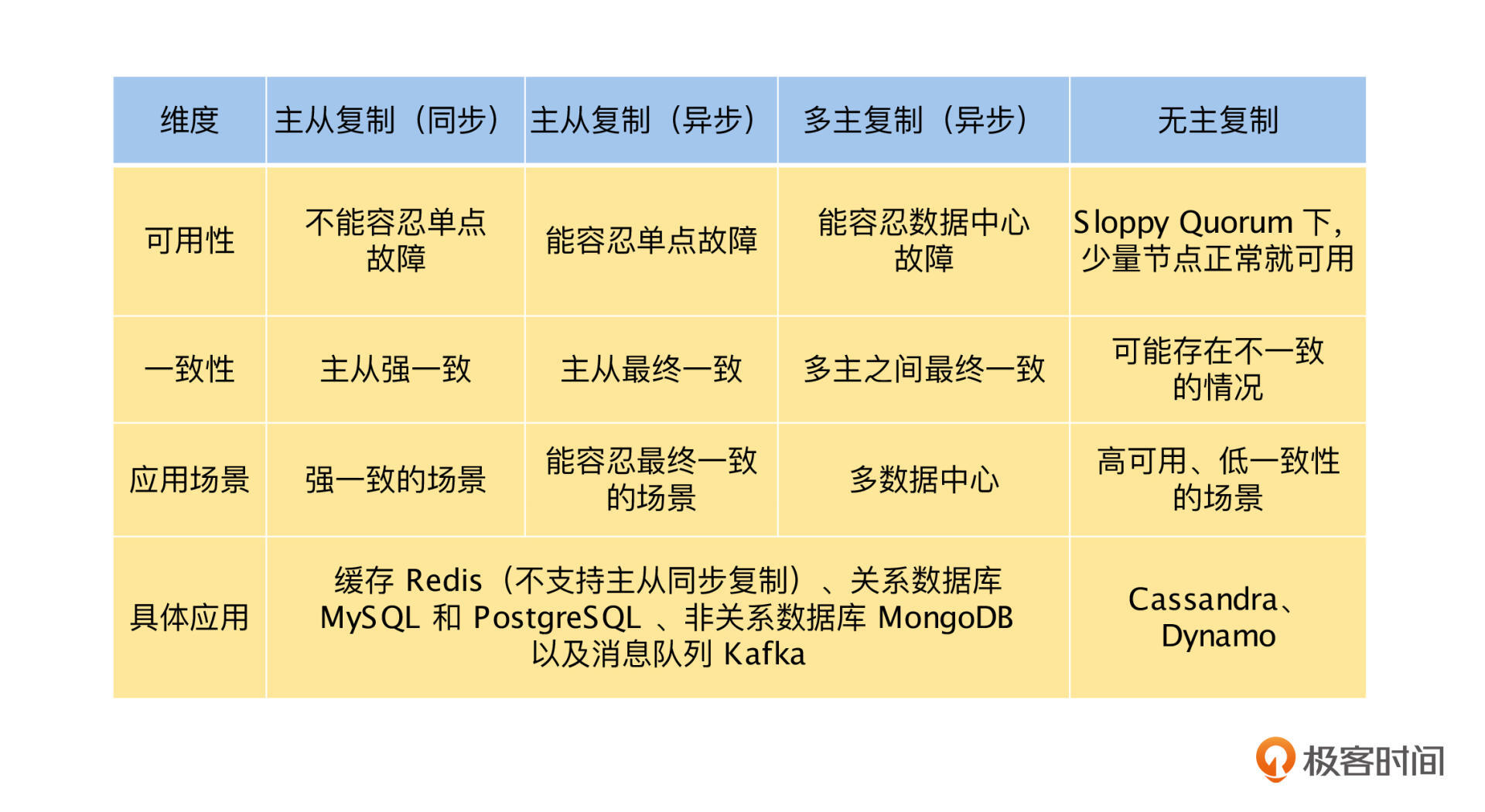
目前,我们已经学习了三种数据复制模式:主从复制、多主复制和无主复制,因为在我们进行存储系统设计时,数据复制是一个非常关键的选择,所以我们再来总结和分析一下,它们的优缺点以及应用场景,具体如下表。
|
|||
|
|
|
|||
|
|
|
|||
|
|
|
|||
|
|
## 总结
|
|||
|
|
|
|||
|
|
无主复制由于写入不依赖主节点,所以在主节点故障时,不会出现不可用的情况。但是,也是由于写入不依赖主节点,可能导致副本之间的写入顺序不相同,会影响数据的一致性。
|
|||
|
|
|
|||
|
|
在实现无主复制时,有两个关键问题:数据读写和数据修复。数据读写是通过仲裁条件 w + r > n 来保证的,如果满足 w + r > n ,那么读副本和写副本之间就一定有交集,即一定能读取到最新的写入。而数据修复是通过读修复和反熵过程实现的,这两个方法在数据的持久性和一致性方面存在一定的问题,如果对数据有强一致性的要求,就要谨慎采用无主复制。
|
|||
|
|
|
|||
|
|
然后,我们了解了 Sloppy Quorum ,它相比于传统的 Quorum ,为了系统的可用性而牺牲了数据的一致性,这里我们可以进一步得出,**无主复制是一个可用性优先的复制模型**。
|
|||
|
|
|
|||
|
|
最后,我们对比了“复制”系列中,三种数据复制模型的优缺点和应用场景,你可以通过这些对比,更加深刻地理解数据复制,并且依据业务场景做出最佳的选择。
|
|||
|
|
|
|||
|
|
## 思考题
|
|||
|
|
|
|||
|
|
如果现在有这样的一个业务场景:数据需要有 7 个副本,读写都能容忍一个节点失败,并且读请求远远大于写请求,那么 w 和 r 为多少最合适呢?
|
|||
|
|
|
|||
|
|
欢迎你在留言区发表你的看法。如果这节课对你有帮助,也推荐你分享给更多的同事、朋友。
|
|||
|
|
|